Мы уже однажды коснулись темы локализации и SLAM в статье о Hector SLAM. Продолжим знакомство с алгоритмами построения карт местности и локализации в ROS. Сегодня мы попробуем построить карту местности без источника одометрии, используя только лидар Hokuyo URG-04LX-UG01 и алгоритм gmapping и локализовать робота на построенной карте с помощью алгоритма amcl. В этом нам поможет laser_scan_matcher. Кому интересно, прошу под кат.
Установка пакета laser_scan_matcher
Итак, начнем! Для экспериментов будем использовать ROS Indigo, но вы можете использовать другую версию ROS (Jade, Kinetic, Hydro). Установка пакетов должна выполняться аналогично (возможно только в ROS Kinetic не будут доступны некоторые пакеты через apt-get).
Пакет laser_scan_matcher это инструмент для инкрементальной регистрации данных лазера, который реализован на основе метода Canonical Scan Matcher, о котором можно почитать здесь. О пакете можно прочитать здесь. Пакет может быть использован без данных одометрии, он сам выполняет оценку одометрии.
Установим пакет:
sudo apt-get install ros-indigo-laser-scan-matcher Попробуем демо:
roscore roslaunch laser_scan_matcher demo.launch Мы увидим нечто подобное в rviz:

Здесь показан laser_scan_matcher в действии на данных лидара, записанных в bag файл.
Теперь попробуем пакет вживую. Чтобы не терять время, сразу попробуем его с алгоритмом gmapping. Создадим пакет с файлом my_gmapping_launch.launch для запуска gmapping:
cd ~/catkin_ws/src catkin_create_pkg my_laser_matcher cd src/my_laser_matcher mkdir launch vim src/my_gmapping_launch.launch Скопируйте следующий код в файл my_gmapping_launch.launch:
Здесь мы запускаем static_transform_publisher из пакета tf для публикации трансформации между системами координат base_link > laser, узлы laser_scan_matcher и slam_gmapping.
Исходный код файла можно скачать отсюда.
Для использования лидара Hokuyo нам нужно установить пакет ROShokuyo_node:
sudo apt-get install ros-indigo-hokuyo-node Запустим узел getID из пакета hokuyo_node чтобы получить информацию о лидаре:
rosrun hokuyo_node getID /dev/ttyACM0 Может возникнуть ошибка:
Error: Failed to open port. Permission denied. [ERROR] 1263843357.793873000: Exception thrown while opening Hokuyo. Failed to open port: /dev/ttyACM0. Permission denied (errno = 13). You probably don't have premission to open the port for reading and writing. (in hokuyo::laser::open) You may find further details at http://www.ros.org/wiki/hokuyo_node/Troubleshooting В этом случае нам нужно добавить права доступа для порта /dev/ttyACM0:
sudo chmod a+rw /dev/ttyACM0 Запустим getID из пакета hokuyo_node еще раз и получим подобный вывод:
Device at /dev/ttyACM0 has ID H0906078 Теперь запустим узел hokuyo_node:
rosrun hokuyo_node hokuyo_node И наконец запустим наш лаунч файл my_gmapping_launch.launch:
roslaunch my_laser_matcher my_gmapping_launch.launch rosrun rviz rviz Выведем список топиков:
rostopic list Среди топиков мы увидим следующие:
/initialpose /move_base_simple/goal /odom /pose2D ... /imu/data Таким образом мы получаем одометрию и позицию робота благодаря laser_scan_matcher.
Добавим в rviz дисплей типа LaserScan с топиком /scan так, как это описано в статье. Также добавим дисплей для карты Map и для трансформации TF. Развернем секцию TF и внутри нее Frames, затем отметим пункты: odom, map, base_link. Напомню, что это системы координат одометрии, карты и робота соответственно. Не забудьте установить значение /map для поля Fixed frame в левой панели Displays в секции Global options.
В rviz мы увидим подобную картинку:

Дальше просто перемещаем робота в пространстве для построения полной карты местности. Используем утилиту map_saver из пакета map_server для сохранения карты:
rosrun map_server map_saver Локализация с amcl
Сейчас попробуем локализовать робота с помощью алгоритма amcl. Создадим файл my_localize.launch внутри нашего пакета со следующим содержимым:
Здесь мы аналогично лаунчеру для gmapping публикуем трансформацию /laser → /base_link с помощью узла static_transform_publisher, узлы hokuyo_node и laser_scan_matcher. Затем мы запускаем map_server для публикации нашей построенной карты, где в args передаем путь до карты в файле yaml. Наконец запускаем узел amcl с параметрами. О параметрах amcl можно прочитать на официальной странице алгоритма.
Код лаунч файла также можно скачать из github репозитория.
Запустим наш лаунч файл:
roslaunch my_laser_matcher my_localize.launch Теперь перейдем в rviz. Установим значение map для Fixed frame в секции Global options. Выведем список топиков:
rostopic list В списке появятся новые топики:
... /amcl/parameter_descriptions /amcl/parameter_updates /amcl_pose ... /map /map_metadata /map_updates ... /particlecloud Топик amcl_pose соответствует позиции робота, публикуемой amcl.
Посмотрим сообщения в топике:
rostopic echo /amcl_pose Получим данные о позиции робота:
header: seq: 15 stamp: secs: 1482430591 nsecs: 39625000 frame_id: map pose: pose: position: x: 0.781399671581 y: 0.273353260585 z: 0.0 orientation: x: 0.0 y: 0.0 z: -0.636073020536 w: 0.771628869694 covariance: [0.2187289446708912, -0.010178711317316846, 0.0, 0.0, 0.0, 0.0, -0.010178711317316819, 0.23720047371620548, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.07106236846890918] --- В rviz мы получим такую картинку:

Как видим точки скана с лидара частично совпадают со стенами на карте. Вот как выглядела моя установка в действительности:

Попробуем переместить робота. Позиция робота и точка обзора карты должны одновременно измениться в окне rviz. После перемещения робота позиция робота может быть определена алгоритмом amcl не точно. Нам нужно выполнить корректировку положения робота с помощью инструмента 2D Pose Estimate. Для этого нажмем в верхней панели инструментов в rviz на кнопку 2D Pose Estimate, кликнем на приблизительную точку центра системы координат робота на карте в rviz (система координат base_link) и будем удерживать зажатой кнопку мышки. Появится зеленая стрелка, исходящая из центра робота:

Потянем стрелку изменяя ее направление и пытаясь совместить точки скана с лидара с черными краями (стены) на карте. Получив наилучшее совмещение отпустим кнопку мышки.

Мы получим такие сообщения в терминале, где запущен my_localize.launch:
[ INFO] [1482431993.717411186]: Setting pose (1482431993.717383): -0.413 -0.071 0.057 На коротком видео можно посмотреть все в действии:

Топик /particlecloud представляет данные о неопределенности положения робота в виде ориентированных позиций (Pose) или так называемое облако частиц. Тип сообщений — geometry_msgs/PoseArray.
Добавим дисплей по названию топика /particlecloud:
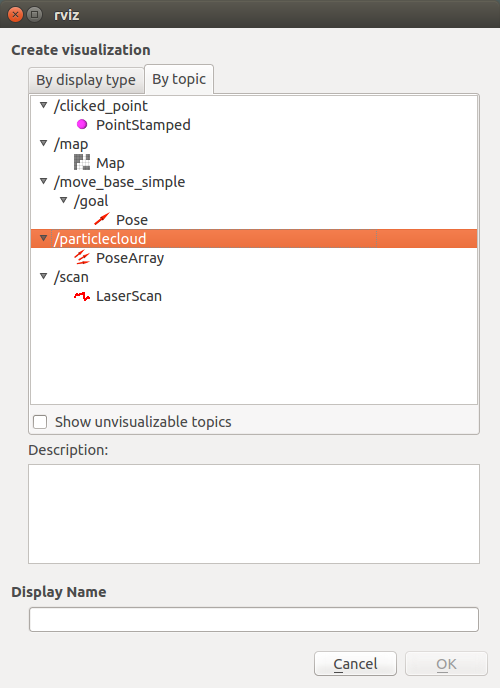
В rviz отобразится облако частиц в виде густого скопления красных стрелок:

Чем гуще скопление частиц, тем выше вероятность положения робота в этой позиции.
Об инструменте 2D Pose estimate, облаке частиц и других понятиях в amcl можно прочитать в туториале на портале ros.org.
На этом все! Все рассмотренные алгоритмы (gmapping и amcl) являются частью большого стека Navigation stack в ROS, о нем можно найти много информации в Интернете. Сегодня мы попробовали в действии инструмент laser_scan_matcher, алгоритмы построения карт gmapping и локализации amcl. Теперь можно легко начать работать над локализацией и навигацией мобильного робота и создать полностью автономного робота, способного ориентироваться в пространстве без необходимости в ручном управлении. Желаю всем удачи в экспериментах и до новых встреч!
PS: Всех с наступающим 2017 годом!
Источник


