
Краткий словарь ЧПУ. Часть 1
Система ЧПУ FMS-3000.
Каждый раз, когда появляются новые, нетипичные для нашей обыденной деятельности задачи, мы начинаем общаться со специалистами по их решению. И каждый раз это общение начинается с непонимания или недопонимания. Нам кажется, что мы недооценили сложность проблемы, что нам не хватает каких-то фундаментальных доступных знаний, однако, этому узкому кругу профессионалов, которые, при всем их дружелюбии, не спешат снизойти до нашего уровня.
Ситуация выглядит зеркально, когда обращаются к нам. Нам непонятно, почему эти неглупые и технически грамотные люди нуждаются в подробном объяснении элементарных вещей и задают детские вопросы.
Проходит время, и всё становится ясно. Мы приобрели новые знания? Нет, скорее, освоили терминологию. Любой круг специалистов создаёт собственный язык. Не для изоляции от непосвящённых, не из щегольства – так проще и удобнее. Специалист пользуется массой стандартных решений, верность которых когда-то была раз и навсегда ему доказана, не задумываясь об их неочевидности для других. Цель данного словаря – облегчить освоение терминологии, связанной с числовым программным управлением станками (ЧПУ).
Абсолютный ноль
Абсолютным нолём называют то положение координаты, в котором она находится в результате выхода в ноль. Эта точка физически определяется ноль-меткой фотоэлектрического датчика положения (или фазой индуктивного) и местом, где появляется сигнал «Точный ноль». Относительно этой точки УЧПУ (устройства числового программного управления) отсчитывает смещения для плавающих нолей. Поскольку абсолютный ноль однозначно привязан к механике станка, относительно него производятся перемещения, связанные с конструктивными особенностями станка, например, выход в зону для автоматической смены инструмента. Относительно абсолютного ноля задаётся положение центров поворотных координат для пятиосевой трансформации и положение датчика для измерения инструмента. Стандартно для задания положения осей относительно абсолютных нолей используется функция G53.
УЧПУ FMS-3000 позволяет индицировать положение осей относительно абсолютного ноля, я также имеет удобную возможность смещения абсолютных нолей осей относительно ноль-меток с помощью параметров. Положения осей относительно абсолютных нолей доступны управляющей программе при помощи средств макроязыка, что широко используется в циклах для датчиков касания и измерения инструмента.
Базовое программное обеспечение
Под базовым программным обеспечением УЧПУ понимают ту часть общего программного обеспечения, которая не зависит от модели станка и выполняет общие для всех типов и моделей станков задачи, такие как управление координатами, анализ и выполнение управляющей программы, обеспечение индикации. Адаптация базового ПО для конкретного станка производится установкой параметров и программой электроавтоматики, которая обменивается информацией с базовым ПО через обменные ячейки. Базовое программное обеспечение УЧПУ FMS-3000 разработано специалистами ООО «Модмаш‑Софт», имеющими богатый опыт работы в данной области. В частности, эти же люди ещё в 1985 году написали программное обеспечение УЧПУ 2С42-65, которое до сих пор успешно работает на тысячах станков ГФ2171.


Булева алгебра
Алгебра логики, или алгебра Буля, – это раздел математики, дающий теоретические основы для управления электроавтоматикой. Булева алгебра оперирует с числами 0 и 1, которые можно трактовать как «ложь» и «истина». Используются три основных операции.
Первая операция – логическое сложение, иначе называемая «или».
0+0=0
0+1=1
1+0=1
1+1=1
Вторая операция – логическое умножение, иначе называемая «и».
0*0=0
0*1=0
1*0=0
1*1=1
Третья операция – инверсия. Инверсия 0 равна 1. Инверсия 1 равна 0.
Полезно знать, что инверсия суммы равна произведению инверсий, а инверсия произведения – сумме инверсий:
/(a+b)=/a*/.
/(a*b)=/a+/b
На практике широко используется формула с «самоподхватом»:


Сигнал a включается по переднему фронту сигнала s и остается включённым, пока не появится сигнал r. Данная формула позволяет работать с импульсными сигналами для включения и выключения. Функции Булевой алгебры реализованы в языке электроавтоматики УЧПУ FMS-3000.
Выход в ноль
Инкрементальные датчики положения координат на станках после включения питания показывают ноль (или около). Чтобы УЧПУ после включения имело истинную информацию о положении координат, требуется выполнить выход в ноль. Для этого используется обменная ячейка, называемая «Точный ноль координаты». По команде УЧПУ происходит движение в направлении абсолютного ноля координаты до появления сигнала в этой ячейке, после чего происходит движение до появления ноль-метки в случае фотодатчика, или до ноля фазы индуктивного датчика положения. Эта точка и признается абсолютным нолём, относительно которого УЧПУ ведёт отсчёт.
Если движение с ожиданием сигнала «Точный ноль координаты» идёт в положительном направлении, говорят, что координата имеет положительный выход в ноль, иначе – отрицательный. Поиск ноль-метки может начинаться после реверса координаты, это называют «выход в ноль с реверсом». Такой вариант удобней, так как позволяет корректно работать, если выход в ноль начинается с уже присутствующим сигналом «точный ноль». УЧПУ FMS-3000 позволяет выбрать удобный для данной оси и модели станка алгоритм выхода в ноль. Параметрами изменяется направление, наличие реверса и даже наличие самой ноль-метки.
Геометрия
Под геометрией понимают описание траектории движения инструмента в управляющей программе. Геометрия задается координатами (X, Y, Z или другие, в зависимости от модели станка), координатами центра окружности для круговой интерполяции I, J, K, подачей F, G-функциями, номерами корректоров при использовании коррекции на размер инструмента. В УЧПУ FMS-3000 применяется традиционная трактовка G-функций, но с помощью параметров можно изменить как набор G-функций, действующих по умолчанию, так и вид программирования центра окружности круговой интерполяции (абсолютный, относительный или в зависимости от G90-G91). Кроме того, макропрограммирование позволяет заменить любую стандартную G-функцию собственной.
Главное движение
Главным движением называют вращение шпинделя, то есть вращение детали на токарных станках и вращение инструмента фрезерных станков. Это движение требует большей мощности при обработке детали по сравнению с подачами координат. Поэтому двигатель главного движения на станке – самый мощный. В УЧПУ FMS-3000 управление главным движением описывается в программе электроавтоматики.
Глобусный стол
Глобусным называют узел пятикоординатного станка, на котором деталь поворачивается вокруг двух взаимно перпендикулярных осей. Линейные перемещения инструмента и детали друг относительно друга производятся таким образом, что деталь всегда движется вместе с глобусным столом. Такая компоновка часто используется в станках, и все УЧПУ, имеющие функцию пятиосевой трансформации, могут работать с этой компоновкой.
Датчики положения абсолютные
Абсолютные фотоэлектрические датчики положения передают данные о положении по последовательному каналу с помощью различных протоколов обмена. Для их подключения к УЧПУ или электроприводу требуются устройства, умеющие работать по этим протоколам. Данные имеют длину посылки, измеряемую в битах. Таким образом, максимальное число, передаваемое с такого датчика, всегда является степенью 2. Круговые абсолютные датчики могут быть многооборотными, для них указываются и полное число бит посылки, и число бит в посылке на один оборот.
Частота изменения данных абсолютных датчиков не зависит ни от частоты обмена по последовательному каналу, ни от частоты опроса. Это снимает ограничение на соотношение дискретности и скорости движения датчика. Приводы, использующие абсолютные датчики с высокой дискретностью, точнее измеряют низкие скорости. Ряд протоколов работы с абсолютными датчиками требует лицензии своих производителей. Открытыми являются протоколы SSI и Biss.
Датчики положения индуктивные
Индуктивные датчики (резольверы, сельсины, индуктосины) запитываются переменным током и выдают сигнал в виде сдвига фазы двух синусоидальных сигналов. Блоки оцифровки индуктивных датчиков делят этот фазовый сдвиг и получают положение датчика в его обороте с точностью делителя. Сразу же после включения индуктивный датчик показывает своё положение внутри оборота фазы. Индуктивные датчики являются абсолютными, но в пределах слишком маленького для УЧПУ диапазона. Например, если фаза делится на 1000, можно получить значения от 0 до 1000 или от -499 до 500, то если дискретность микронная, это всего миллиметр, и УЧПУ должно вести счёт переполнений. Индуктивные датчики подвержены помехам, которые создают современные цифровые электроприводы.
Датчики положения инкрементальные
Фотоэлектрические инкрементальные датчики при движении выдают две последовательности импульсов, сдвинутых на 90 градусов. При движении вперёд полученные данные выглядят как 00, 10, 11, 01, 00. При движении назад последовательность сигналов обратная 00, 01, 11, 10, 00. Блок оцифровки реагирует на каждое изменение сигналов и, зная предыдущее состояние, прибавляет или вычитает единицу из накопленной величины. При включении фотоэлектрические датчики всегда начинают считать с ноля, поэтому для определения начала отсчёта и выхода в ноль есть дополнительный сигнал – ноль-метка. Если на станке максимальная подача 15000 мм/мин, а датчик измеряет положение с точностью до 0.001 мм, сумматор должен работать с частотой более 250000 Гц. Поскольку частота тика таймера УЧПУ явно ниже, для оцифровки фотоэлектрических датчиков требуются специальные аппаратные средства. УЧПУ FMS-3000 работает с сигналами фотоэлектрических датчиков.
Датчики касания
Датчики касания устанавливаются в инструментальную оправку и решают три задачи: привязку заготовки к системе координат станка, проверку размеров обработанной детали и температурную компенсацию.
Заготовка детали должна иметь базовые поверхности или отверстия, положение которых относительно ноля координат детали известно. Датчик касается заготовки в этих точках, после чего УЧПУ вычисляет положение точек касания относительно абсолютных нолей станка и заносит разницу в таблицу смещений для заданного плавающего ноля.
С помощью датчика касания можно определить расстояния между заданными точками на детали, диаметры отверстий, межосевые расстояния, углы и многое другое. Результат каждого измерения передаётся управляющей программе в виде переменных макроязыка для последующей обработки.
Если измерить положение заранее известной точки на столе станка, то отклонение размера от первоначального даёт информацию о температурном расширении конструкций станка. Эта разница может быть учтена для повышения точности последующей обработки.
Принцип измерения датчиком касания основан на использовании G-функции «Завершение кадра по внешнему сигналу» (в FMS-3000 – G32). При задании этой функции в кадре движение завершается, и программа переходит к выполнению следующего кадра не только по достижении заданной в кадре точки, но и при появлении специального дискретного сигнала от датчика касания. Положение координат станка в момент касания доступно управляющей программе через запросы макроязыка.
Следует помнить, что измерение детали производится датчиками положения станка, а срабатывание датчика касания задаёт только точку, в которой производится считывание данных. Поэтому точность измерений датчиком касания не может быть выше собственной точности станка.
Датчики с кодированными метками
Датчики с колированными ноль-метками являются разновидностью линейных инкрементальных датчиков положения. Такой датчик имеет множество ноль-меток, расстояния между парами которых разные. Таким образом, после фиксации двух ноль-меток при движении в одну сторону можно определить абсолютное положение датчика. Процедура выхода в ноль требует перемещения только на известную величину, а не выхода в одну и ту же точку, как для прочих инкрементальных датчиков.
Датчик на двигателе и на конечном звене
Движение оси на станке производится при помощи двигателя с приводом, имеющим собственный датчик положения для обратной связи по скорости. Для устойчивой работы с приводом этот датчик должен быть механически связан с двигателем без люфта, неравномерности или упругости. УЧПУ может использовать для вычисления текущего положения оси как датчик двигателя, так и другой, механически расположенный ближе к месту установки детали и инструмента, то есть к конечному механическому звену. Использование датчика двигателя требует учёта механической передачи от датчика до конечного звена и ввода компенсации погрешностей этой передачи. Использование датчика на конечном звене обычно повышает точность позиционирования, но снижает точность движения по траектории при наличии погрешностей механической передачи, которые в этом случае невозможно скомпенсировать, так как они оказываются внутри контура обратной связи по положению.
Дискретность
Длина – величина аналоговая, и её представление в числовом виде требует оцифровки, которая производится датчиками положения с точностью до некоторой величины, называемой дискретностью датчика. УЧПУ в свою очередь имеет свои требования к точности задания на перемещение в управляющей программе. Минимальное перемещение, которое может выполнить УЧПУ, называют дискретностью УЧПУ. Не следует путать дискретность с точностью. Разумеется, точность станка не может быть выше дискретности его датчиков и УЧПУ, но, если УЧПУ отрабатывает микрон, это не значит, что с такой же точностью можно получать детали. УЧПУ FMS-3000 стандартно использует дискретность 0.001 мм или 1/1000 градуса для круговых осей. Но число знаков после точки можно увеличить до 5.
Добротность
Добротность, или коэффициент усиления привода, – это коэффициент, на который умножается рассогласование, чтобы получить задание на привод подачи координаты. Величина добротности определяется исходя из принятого соотношения между рассогласованием и подачей, максимальной подачи и числа для максимального задания на привод. Например, максимальная подача 6 м/мин, рассогласование принято 1 мм на м/мин, а максимальное задание 32767 (15 двоичных разрядов). Получаем, что максимальное рассогласование будет 6 мм или 6000 мкм. Чтобы из 6000 получить 32767, 6000 надо умножить на 5.461. Это и есть искомая добротность. В УЧПУ FMS-3000 добротности задаются параметрами.
Надеемся, этот словарь был полезен студентам технических вузов, молодым специалистам, а также маркетологам и менеджерам высшего звена машиностроительных предприятий. Совсем скоро выйдет следующая часть словаря, где Вы сможете ознакомится с еще большим количеством терминов.
Похожие статьи
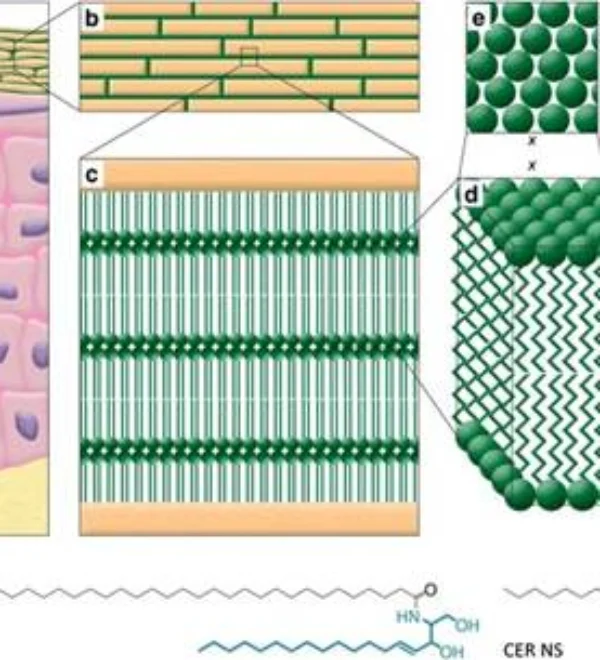 Анатомия кожи: как работает ее естественная защита?
Анатомия кожи: как работает ее естественная защита? Глобальная Управляющая Система: интерпретация высшего разума через призму ТАУ и кибернетики
Глобальная Управляющая Система: интерпретация высшего разума через призму ТАУ и кибернетики Продолжение обзора самых безумных карманных гаджетов наших дней
Продолжение обзора самых безумных карманных гаджетов наших дней Разбор дифференциалов первого и второго порядков для продвинутых
Разбор дифференциалов первого и второго порядков для продвинутых Поиск инопланетных цивилизаций: как обнаружить звездных «энергокрадов» по замедлению светил
Поиск инопланетных цивилизаций: как обнаружить звездных «энергокрадов» по замедлению светил Президент Линкольн — изобретатель и патентообладатель
Президент Линкольн — изобретатель и патентообладатель Анализирую проблему автономной нейросети
Анализирую проблему автономной нейросети Электрическое поле Земли: 200 вольт над вашей головой, которые вы не замечаете
Электрическое поле Земли: 200 вольт над вашей головой, которые вы не замечаете