В 1966 году в пятом номере журнала «Техника — молодёжи» появилось объявление о старте всесоюзного конкурса на лучшую конструкцию человекоподобного робота.

Сам конкурс изначально не вызвал большого ажиотажа, и организаторы даже вынуждены были продлить его еще на полгода до лета 1967 года. Но первые публикации присланных работ в ноябре 1966 года вызвали поток новых писем. Награждение победителей конкурса показали по центральному телевидению, и с ним связана одна забавная история с малоизвестной на то время 18-летней девушкой, для которой это также было одно из первых выступлений на ТВ.
Закончилась песня «Робот», и тут, в полном соответствии с нашей задумкой, из-за колонны выходит скрытый доселе 200-килограммовый «Сибиряк-2» — его сделали в омском ПТУ — и протягивает букет цветов. Певицу, видимо, в спешке забыли заранее предупредить, она с криком отшатывается от стального чудища, а потом, вспомнив о кинокамере, пытается с достоинством взять букет. Но механизм кисти робота, как назло, заело, и он его не выпускает. Наконец, певица буквально отрывает цветы и, чуть не со слезами, убегает. Конферансье же как ни в чем не, бывало, с присущей ему светскостью, объявляет: «Выступала Пугачева»…
Юрий Филатов, заместитель главного редактора журнала «Техника – молодежи».

После телепередачи поток писем хлынул с нарастающей силой. Так что в последующие годы журнал провел дискуссию «Кто вы, робот?» (для которой художник Леонид Рындич сделал опознавательную марку с витиеватой надписью «Робот, мой милый робот»), прямо как мы в RoboUniver в январе этого года, второй заочный конкурс «71 — РОБОТ-72», и всесоюзный слет робото-строителей в 1973 году.
А нам же интересно рассказать вам, каких роботов смогли собрать в учебных заведениях и станциях юных техников того времени, посмотреть на их конструкцию и, по возможности, узнать их судьбу. Ориентироваться мы будем по публикации в журнале «Техника-Молодежи»: №11 за 1966 год и 2,6 и 8 номера за 1967 год.
Борис Василенко и робот «Нептун»
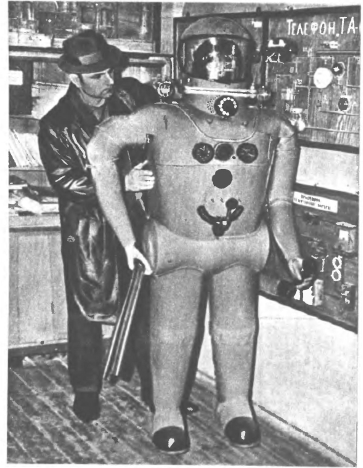
Робот «Нептун» (как и его «брат» Электрон) был создан в Калининградском профессионально-техническом училище (ГПТУ-9). Робот был построен из корпусов списанных водолазных костюмов для глубоководных работ. На шлем вместо иллюминаторов вставлялось оргстекло, а внутри такой «головы» помещались «органы чувств», смонтированные на пластмассовом буе. Помимо привычных человеку зрения и слуха, эти роботы могли распознавать радиоактивный фон и реагировать на его повышение звуковыми и световыми сигналами и позиционировались как помощники для исследований в опасных условиях.
С помощью газового счетчика робот может реагировать на радиоактивность. В нескольких метрах от опасной зоны он звуком, речью и световыми сигналами предупреждает о радиоактивном заражении. Робот способен также видеть свет (фотореле), «слышать» звук (микрофоны), ощущать тепло (термоэлементы). С помощью сложной контактной системы и блока звуколокатора, работающего на принципе отражения звуковых колебаний от окружающих предметов, он замечает препятствия на своем пути и ловко их обходит.
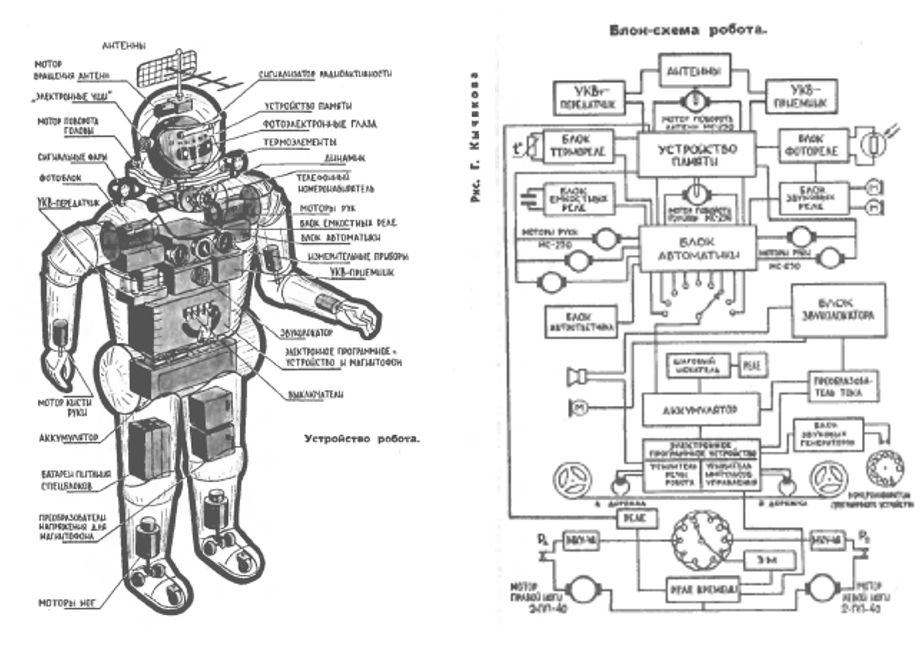
Программы поведения роботов записывались на магнитную ленту. Чаще всего применялся двухдорожечный магнитофон АФП-1. На первой звуковой дорожке записывалась речь робота, на второй — командно-управляющие импульсы, позволяя сохранять несколько тысяч различных наборов команд. Через реле, установленное в магнитофоне, импульсы управляли движением шагового искателя, к которому были подключены все остальные механизмы. За движение робота отвечали реверсивные мотор-редукторы (2МС-250 и 2ПП-40). Питание осуществлялось аккумуляторами, запаса энергии хватало на 8 суток. Нептун имел рост выше двух метров и вес 196 килограмм, при этом мог двигаться со скорость от 2 до 5 км/час. Управлять роботом можно было не только по заранее записанной программе, но и в реальном времени, подавая команды через УКВ радиолинию.

В училище в итоге было создано около двух десятков роботов разных типов, а Нептун сохранился до наших дней и находится в одном из музеев Калининграда. И именно он в 1967 году он со своим автором «забрали» главный приз конкурса – мотоцикл.
Робот-секретарь АРС
АРС (сокращение от «автоматический робот секретарь») создал Борис Николаевич Гришин. Этот человек не был ни ученым, ни изобретателем. Он работал учителем черчения в железнодорожном техникуме города Калуги. По итогам конкурса робот АРС был отмечен призом за самую сложную конструкцию. Но увы автор не смог его представить лично.

АРС имел уникальные даже для нашего времени функции.
-
мог разбудить хозяина в нужное время, включить запись с утренней гимнастикой и напомнить, какие дела запланированы на этот день.
-
мог отвечать на телефонные звонки и аккуратно записывать их;
-
мог взять телефон и принести его своему хозяину, а если тот попросит, то совершить звонок самостоятельно;
-
реагировал на голосовые команды: мог позвонить нужному человеку в указанное время, сделать звонок в справочное бюро, вызвать пожарных или скорую помощь, ориентируясь на показание специальных датчиков в квартире;
-
включал бытовую технику и свет в нужное время;
-
регулировал нужную температуру в квартире за счет открывания и закрывания кранов на радиаторах отопления;
-
даже мог сам встретить гостей и угостить их напитками.
Целью создания этого робота было отнюдь не развлечения. У Бориса Николаевича тяжело болела мама и робот АРС создавался как помощник по уходу за ней.
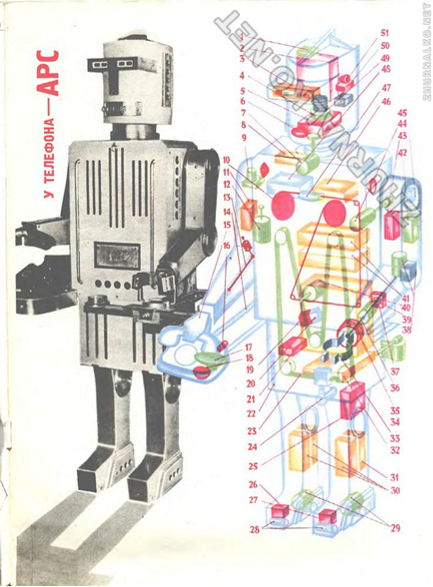
Весил АРС примерно сто килограммов и имел модульную конструкцию в виде отдельных блоков с разъемами. Робот имел минимум электроники, электромеханическое управление. «Звучал» АРС за счет двух магнитофонов: «бобинника» на обычной ленте и многодорожечного на восемнадцатимиллиметровой ленте, где была записана речь.
Двигался робот за счет тринадцати электродвигателей. Особой сложностью отличалась его механическая рука, механизм которой позволял взять бутылку, разлить жидкость в стаканы, потом поставить на место бутылку, снова взять стакан и поднести его человеку.

Сейчас АРС является экспонатом Государственного музея истории космонавтики в Калуге.
Робот «Сибиряк-2»
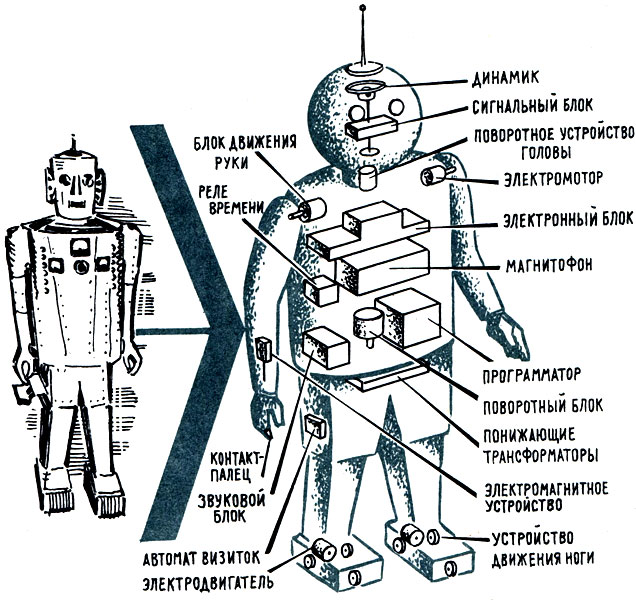
Робот, который напугал Аллу Борисовну, был изначально создан в Омском городском училище (ГПТУ-2) для павильона «Профтехобразование» ВДНХ. По замыслу создателей это должен был быть механический экскурсовод, который рассказывал бы посетителям об экспонатах выставки. «Сибиряк-2» мог быть не только экскурсоводом в выставочных залах, но и продавцом или распространителем лотерейных билетов, литературы, мог рекламировать товары в магазинах или натирать паркетные полы.
Робот состоял из 19 блоков: основного блока управления движением ног, головы и правой руки, поворота корпуса; программирующего устройства; реле времени. Питался робот от сети, управлялся опять же через команды с магнитной ленты, которые через звуковое реле и программатор преобразовывались в программные импульсы, уходящие непосредственно на блоки ног, рук и речи. Управлялся «Сибиряк-2» как автоматически, так и вручную. О дальнейшей судьбе данного робота не известно, но в 1971 году в «Технике-молодежи» был представлена новая версия робота под названием «Сибиряк-3».
Робот «Сепулька»
«Сепулька» был разработан и изготовлен советской опытно-экспериментальной фабрикой наглядных пособий и демонстрационной аппаратуры общества «Знание» в 1962 году. Он мог перемещаться по полу с помощью небольших колёс, приводимых в движение электромоторами. Колёса во время движения имитировали ходьбу ног в ботинках. Электрическое питание робота осуществлялось от сети 220 В с помощью электрического шнура с вилкой. Речь, демонстрируемая роботом, записывалась на магнитную ленту, которая воспроизводилась на кассетном магнитофоне.

Его имя создатель-конструктор Михаил Александров позаимствовал из рассказов Станислава Лема. Робот проводил экскурсии по залу робототехники в историческом здании музея. Но назвать «Сепульку» полноценным роботом можно только условно: речь, которую он произносил во время экскурсии, была записана на встроенный магнитофон, а движениями дистанционно управлял оператор. Но это не мешало Сепульке много десятилетий быть любимцем публики.

Сейчас «Сепулька» является экспонатом Политехнического музея в Москве.
Робот РИД, играющий в домино
Этого робота собрали три школьника: Виктором Кушнаревич, Петр Обрезанов и Михаил Фейнгольд из кружка кибернетики областной станции юных техников города Харьков. В 1964 году РИД экспонировался на ВДНХ СССР. Из девяти партий, сыгранных там, робот выиграл пять.

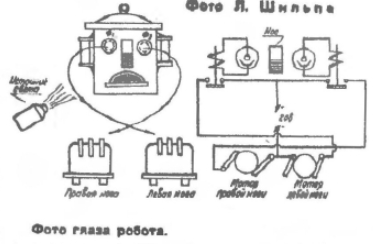
РИД имел релейно-контактное устройство и мог играть с двумя «живыми» противниками. Игровые кости закладывались в считывающее устройство. От него сигналы поступали в блок памяти. Для того, чтобы РИД смог распознать индекс кости, на лицевой стороне каждой из них были нанесены два дополнительных знака. Робот мог запоминать кости, которые уже были сыграны им и противниками, анализировать свои фишки домино и выбирать нужную программу в зависимости от того или иного варианта хода.
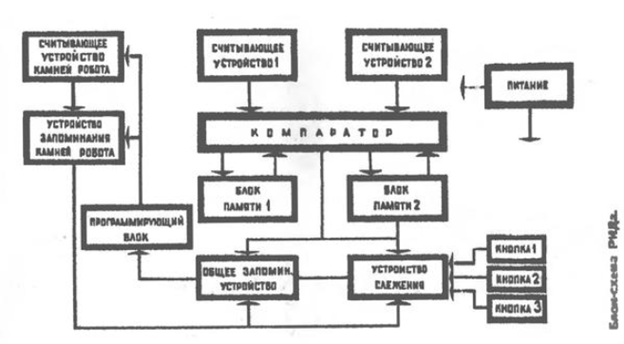
Программа робота была «жестко» задана на плате и изменить ее можно было только перепайкой. РИД был неподвижным и больше походил на игровой автомат, чем на андроида, но мог «смотреть» на того или иного противника, а также «выбрасывать» игровые кости на стол из своей руки.
Робот-киногерой «РУМ» от Вадима Мацкевича

Был построен силами школьников на станции юных техников в городе Щелково, Московской области в 1960 году. Имел рост под два метра и вес в районе двухсот килограммов. В качестве приводов в нем были применены рулевые механизмы от самолетного автопилота. Почему «киногерой»? Внешний вид робота был вдохновлен советским фантастическим фильмом «Гибель сенсации». Школьники просматривали его в режиме стоп-кадров и перемоток, зарисовывая визуальный стиль и записывая поведение главного героя – робота.
Робот выполнял 18 команд, двигался вперед, назад, направо, налево и т. д. Для программирования нужно было набрать программу в виде импульсов телефонным номеронабирателем на пульте управления и передать роботу по радио. Робот мог двигать руками, а с помощью соленоидов даже сжимал пальцы. Если на него направляли луч карманного фонарика, то он двигался в его сторону за счет фотодатчиков в голове.
Роботом можно было также управлять звуком (свистками), и он мог воспроизводить заранее записанную речь. Была у него изюминка: робот понимал команды голосом, хотя никакого модуля его распознавания в нем не было. Все оказалось гениально просто. Робот реагировал на число звуковых импульсов в команде: СТОП (1 импульс), НАПРА-ВО (2 импульса), НА-ЛЕ-ВО (3 импульса). До наших дней робот, увы, не сохранился.
Как видим, история отечественной робототехники имеет достаточно глубокие корни и к ней приобщались как школьники, так и студенты. Да, на первом конкурсе большая часть писем была лишь с описанием идей, а готовых роботов могли собрать не все. Но свою задачу популяризации робототехники он сделал. Мы, в свою очередь, также продолжаем обучать будущее поколение робототехников. А вы в своем детстве сталкивались с робототехникой и пытались собрать своего робота?


