
Основы обработки данных радиолокационного дистанционного зондирования Земли
От автора
В последние годы повысился интерес к теме коммерциализации отечественной аэрокосмической отрасли и, в частности, к теме дистанционного зондирования Земли (ДЗЗ) из космоса. Государственные и частные компании стали анонсировать планы по созданию отечественных многоспутниковых группировок космических аппаратов (КА) ДЗЗ, в том числе и КА радиолокационного наблюдения. Повысился и интерес к вопросам организации эффективной наземной инфраструктуры приема и обработки данных ДЗЗ. Наш коллектив более 20 лет занимается разработкой программного обеспечения в области ДЗЗ и создал в общей сложности более 20 наземных комплексов автоматической обработки данных с космических аппаратов оптико-электронного и радиолокационного наблюдения. Наблюдая повышенный интерес к этой предметной области с одной стороны и явный недостаток информационных материалов по теме обработки радиолокационных данных ДЗЗ с другой, решили написать статью, которая, надеемся, будет полезна для всех интересующихся темой ДЗЗ.
Востребованность данных радиолокационной съемки
В настоящее время все более востребованными становятся данные радиолокационного наблюдения (РЛН) с космических аппаратов дистанционного зондирования Земли. Это продиктовано как теоретическими возможностями (всепогодное и круглосуточное наблюдение, расширенные возможности дешифрирования и оценки обстановки, формирование цифровых моделей рельефа наблюдаемой поверхности и др.) так и появлением КА РЛН с продвинутыми техническим характеристиками получаемых радиолокационных данных (геометрическое разрешение, отношение сигнал/шум, точность геопривязки).
В космических аппаратах радиолокационного наблюдения используются радиолокаторы с синтезированной апертурой антенны (РСА, англ. SAR). При этом, в мире все больше внимания уделяется разработке РСА и программных комплексов формирования радиолокационных изображений (РЛИ), высокого (1 метр и более) и сверхвысокого (менее 1 метра) разрешения. Также, в развитии РСА можно отметить такие направления как сокращение периодичности наблюдения до одних суток (в том числе, для обеспечения возможности получения интерферометрических пар РЛИ), использование различных диапазонов частот и типов поляризации (в том числе, для повышения информативности РЛИ). Обработанные РЛИ используются для решения ряда тематических задач, в том числе, для оценки характеристик наблюдаемых пространственно распределенных объектов (количественные характеристики нефтяных разливов, оценка площадей пожаров и наводнений, оценка урожайности и объема биомассы растительности, контроль границ застройки, целостность дорог, трубопроводов и др.).
Решаемые задачи определяют требования к РСА по разрешающей способности. В таблице ниже в качестве примера приведен список задач и соответствующих требований к ним по разрешению в метрах.
|
Решаемые задачи / Наименование объекта |
Обнаружение, м |
Распознавание, м (общее / точное) |
Детальное описание, м |
|
Общие задачи ДЗЗ |
|||
|
Мониторинг ледовых образований |
— — — |
1000 / 300 |
— — — |
|
Судоходство, рыбная ловля |
300 |
30 / 15 |
— — — |
|
Мониторинг растительности, лесов, землепользование |
— — — |
25 / — — — |
2 — 5 |
|
Экологический мониторинг |
— — — |
25 / — — — |
2 — 5 |
|
Геологическое картирование |
— — — |
25 / — — — |
3 |
|
Мониторинг чрезвычайных ситуаций |
|||
|
Землетрясения, извержения |
— — — |
25 / — — — |
2 — 5 |
|
Аварии трубопроводов |
— — — |
— — — / — — — |
2 — 5 |
|
Картографирование |
|||
|
Местность |
— — — |
90 / 4.5 |
1.5 |
|
Населенные пункты |
60 |
30 / 3 |
3 |
|
Дороги |
6 — 9 |
6 / 1.8 |
0.6 |
|
Мосты |
6 |
4.5 / 1.5 |
1 |
|
Обнаружение и дешифрирование объектов |
|||
|
Корабли |
7.6 — 15 |
4.5 / 0.6 |
0.3 |
|
Самолеты |
4.5 |
1.5 / 1 |
0.15 |
|
Автомобили |
1.5 |
0.6 / 0.3 |
0.05 |
В настоящее время в мире существует, и достаточно много, космических РСА, позволяющих получать РЛИ с разрешением порядка 1 метра. На Рисунке 1 представлена информация о ряде существующих и перспективных КА РЛН.
Рисунок 1. Пример существующих и перспективных КА ДЗЗ РЛН
Если сопоставить используемые длины волн с заявленными значениями разрешения РЛИ (Рисунок 2), то обращает внимание, что, в основном, эксплуатируемые и разрабатываемые системы РЛН, обеспечивающие разрешение до 1 м и меньше осуществляют съемку в Х- (длина волны 2,5 — 3,75 см) диапазоне длин волн. Дело в том, что для получения разрешения 1 – 2 м по наклонной дальности (поперек направлению движения КА) необходима ширина полосы зондирующего импульса в диапазоне 150 – 200 МГц. В соответствии с Регламентом Радиосвязи такие значения полосы разрешены только для S- или Х-диапазонов длин волн. Чаще всего выбирают Х-диапазон, т.к. в этом случае для получения высокого разрешения в азимутальном направлении требуется меньшее время накопления сигнала (время непрерывного сканирования одного объекта), что облегчает обработку и формирование РЛИ.
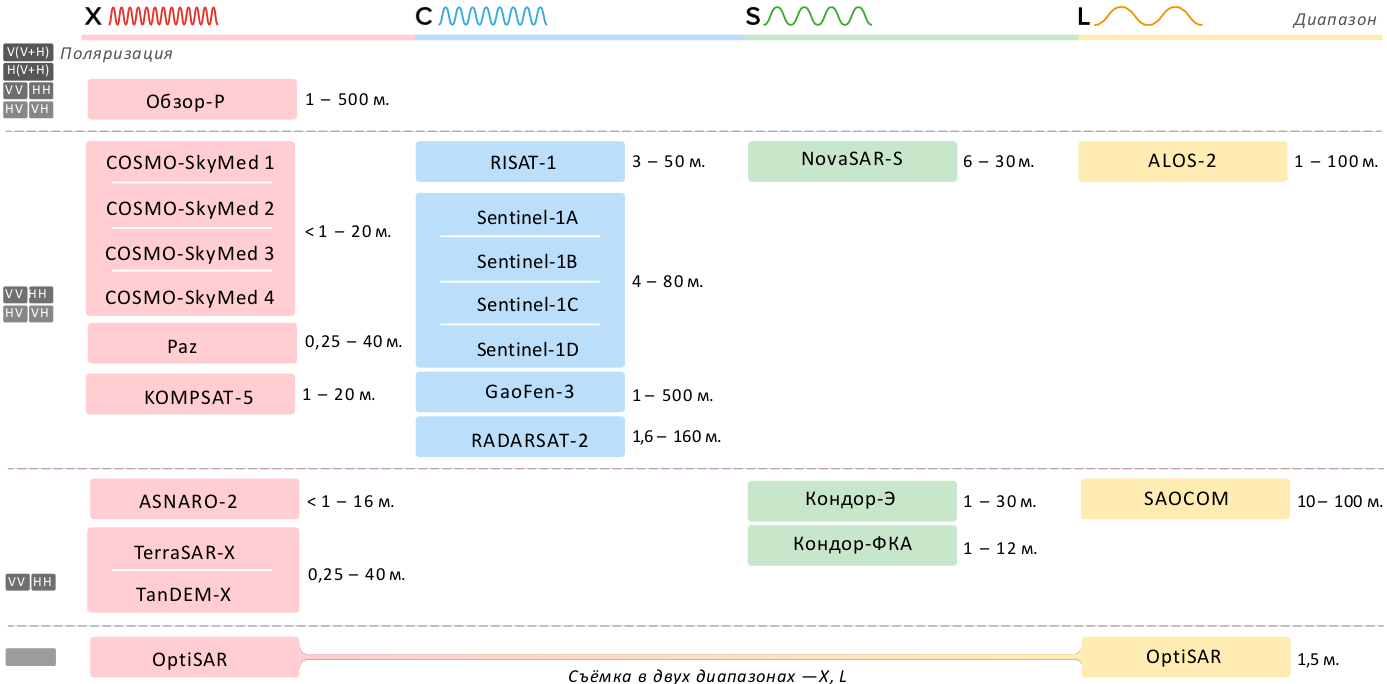
Рисунок 2. Примеры используемых диапазонов длин волн КА ДЗЗ РЛН
Принцип радиолокационной съемки
Системы радиолокационного обзора относятся к классу активных систем. Информация о земной поверхности формируется за счет генерации радиолокатором электромагнитного излучения с последующим приемом и специальной обработкой отраженных от наземных объектов электромагнитных импульсов. В отличие от активных систем при пассивном зондировании (например, оптико-электронное наблюдение) информация о земной поверхности может быть получена путем приема излучений, сформированными сторонними источниками, например, солнечное излучение, инфракрасное излучение при пожарах и др. (Рисунок 3).
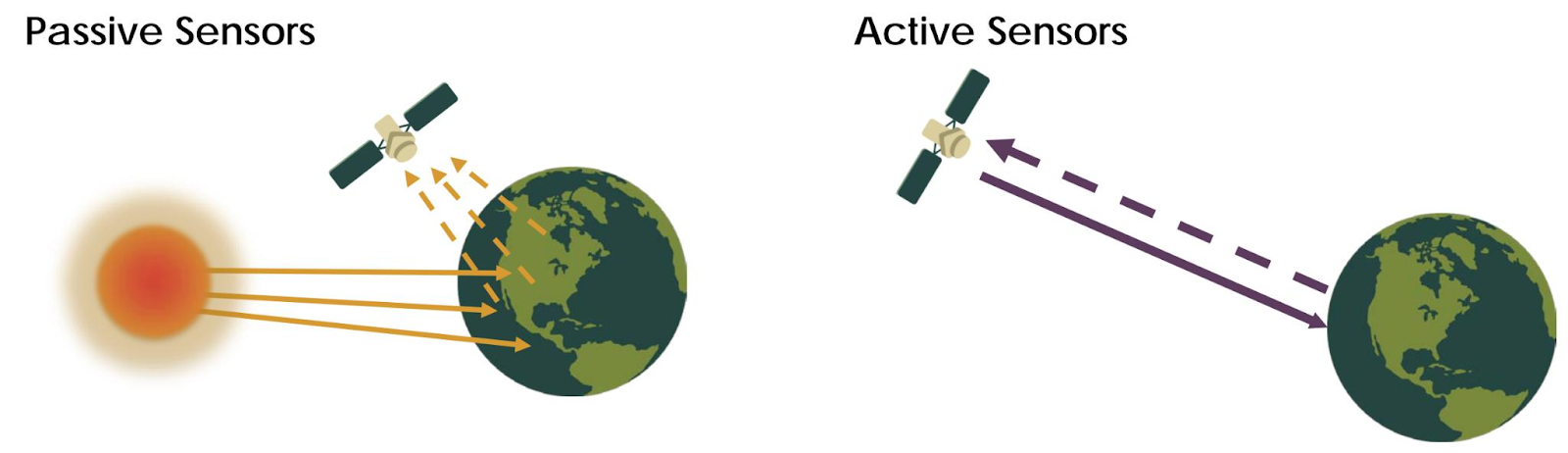
Рисунок 3. Отличие пассивных (слева) и активных (справа) систем ДЗЗ
Излучаемая электромагнитная волна распространяется во все стороны с одинаковой световой скоростью. При этом мощность излучения разная в разных направлениях. В системах РЛН характер распределения мощности по направлениям определяется свойствами антенной системы. Зависимость мощности излучения от направления формирует так называемую диаграмму направленности антенны (ДНА).
На Рисунке 4 представлен пример горизонтального сечения диаграммы направленности, на которой в полярной системе координат для каждого направления (угла отклонения от оси диаграммы) отложено соответствующее значение мощности излучения.
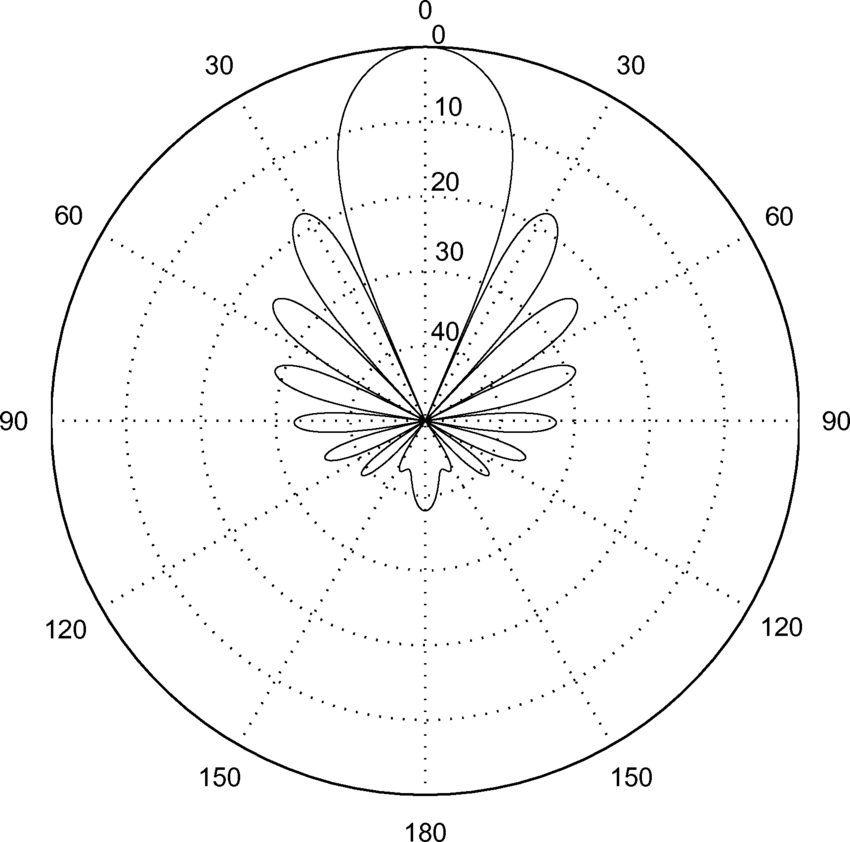
Рисунок 4. Пример горизонтального сечения ДНА
Излученный сигнал отражается от земной поверхности, энергия сигнала частично поглощается, частично рассеивается, частично отражается в пространство, а часть энергии отражается в сторону радиолокатора. Отраженный сигнал детектируется приемником радиолокатора, демодулируется и записывается на бортовой носитель. Полученная совокупность сигналов образует радиолокационную голограмму, которая требует дальнейшей обработки (синтез) для получения РЛИ. На Рисунке 5 представлены фрагменты РЛИ, элементы которого соответствуют различным типам поверхности.
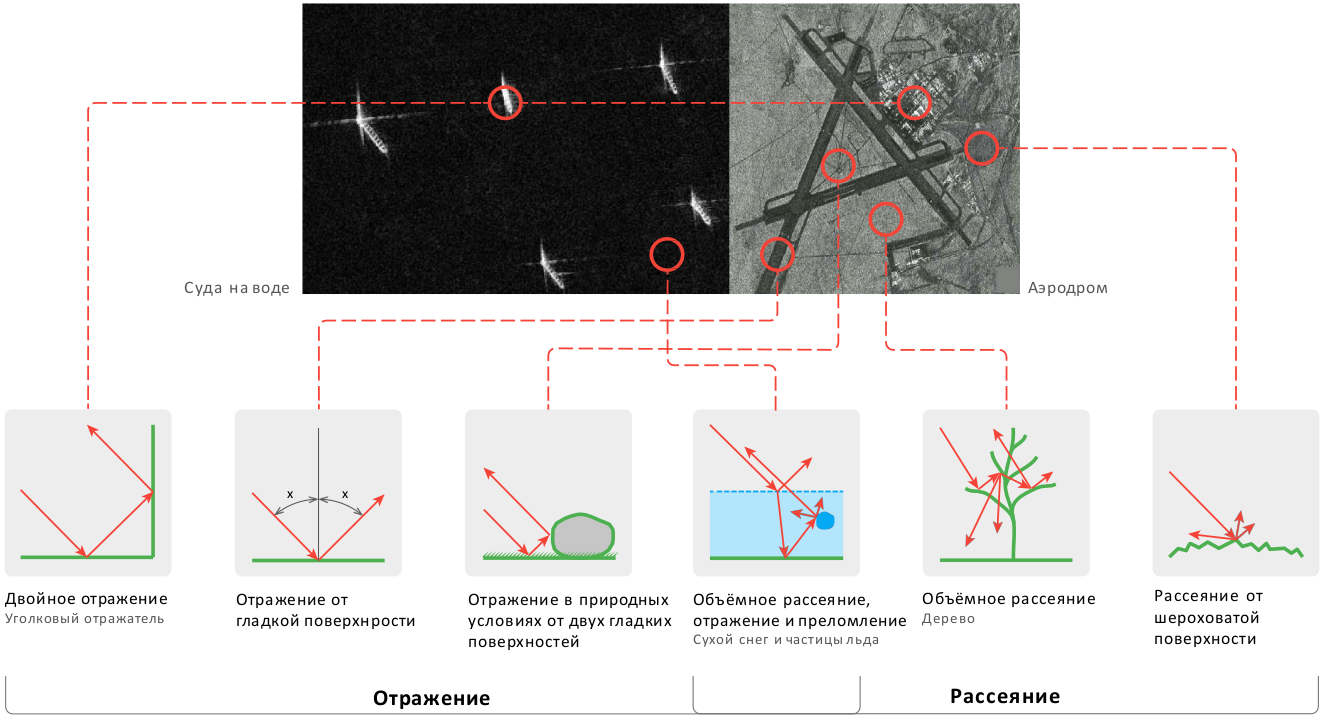
Рисунок 5. Типы поверхности и соответствующие им элементы РЛИ
Временная диаграмма работы радиолокатора (интервалы излучения, приема, задержки) рассчитывается таким образом, чтобы обеспечить прием излучения, соответствующего только области, задаваемой шириной диаграммы направленности. Ширина диаграммы направленности определяется по уровню, соответствующему половине мощности главного лепестка. Это ограничение обусловливает зону “пятна сканирования” в пределах которого за один такт (излучение / прием) будет получена информация о земной поверхности. При приеме на вход приемника поступают радиолокационные сигналы, отраженные от всех наземных целей, попадающих в зону главного лепестка диаграммы направленности антенны. При этом происходит сложение отраженных сигналов.
Геометрия радиолокационной съемки
Одной из особенностей радиолокационной съемки является принципиальное требование бокового обзора (съемка не производится в полосе надира на ширину диаграммы направленности в обе стороны). Это требование устанавливается для того, чтобы избежать так называемой неоднозначности по дальности — одновременного приема отраженного сигнала от объектов, расположенных на одинаковой дальности в плоскости, проходящей через ось диаграммы направленности и поперечной траектории движения КА. Иллюстрация бокового обзора приведена на Рисунке 6.
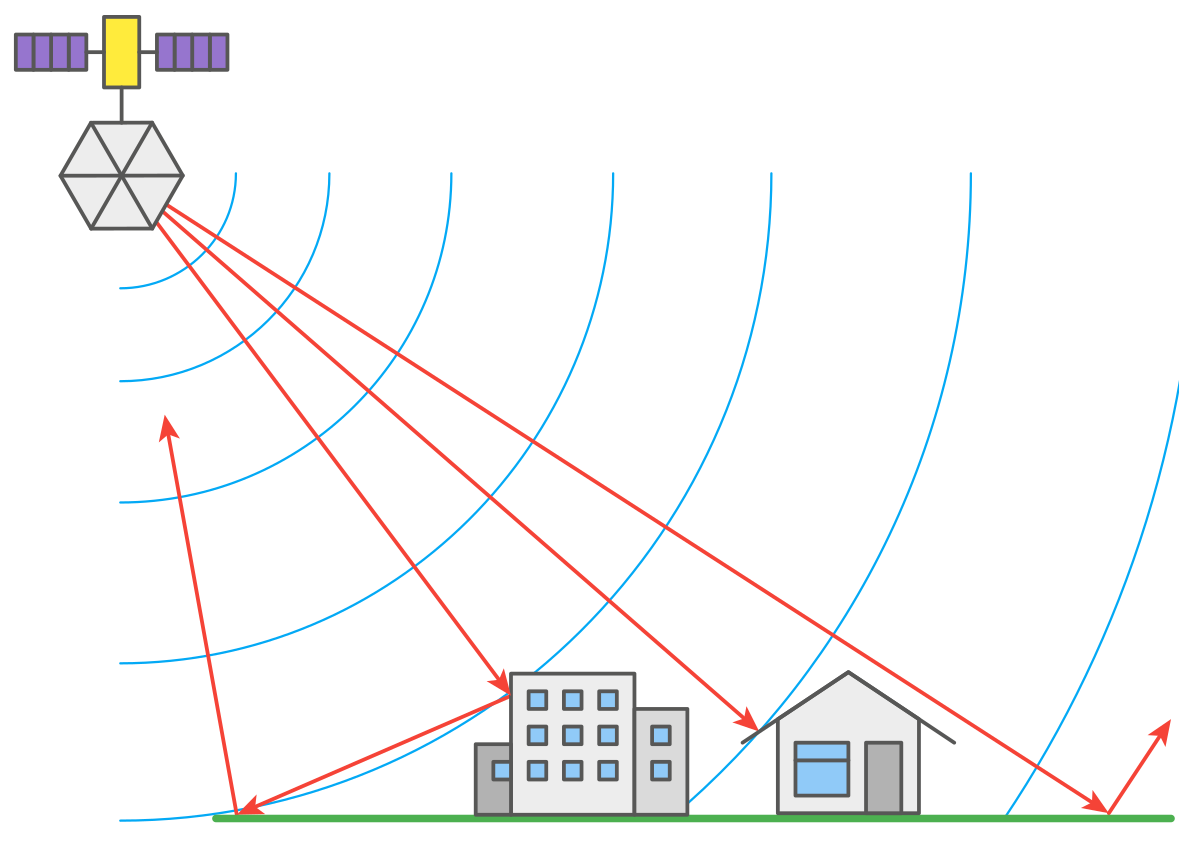
Рисунок 6. Боковой обзор радиолокационной съемки
При приеме отраженного радиолокационного сигнала в течение заданного временного интервала осуществляется его дискретизация с определенной частотой. Каждому дискрету сигнала можно поставить в соответствие значение наклонной дальности до точки на земной поверхности, от которой произошло переотражение излученного сигнала. Синтезированное РЛИ представляет собой набор строк, каждый пиксель которых соответствует положению объекта на соответствующей дальности от КА. Расстояние по Земле от подспутниковой точки в момент съемки до цели называют наземной дальностью, расстояние от КА до этой же цели называют наклонной дальностью.
На Рисунке 7, приведена иллюстрация геометрии обзора и соответствия наземных целей (Ag, Bg) с пикселями в строке изображения (Asl, Bsl).
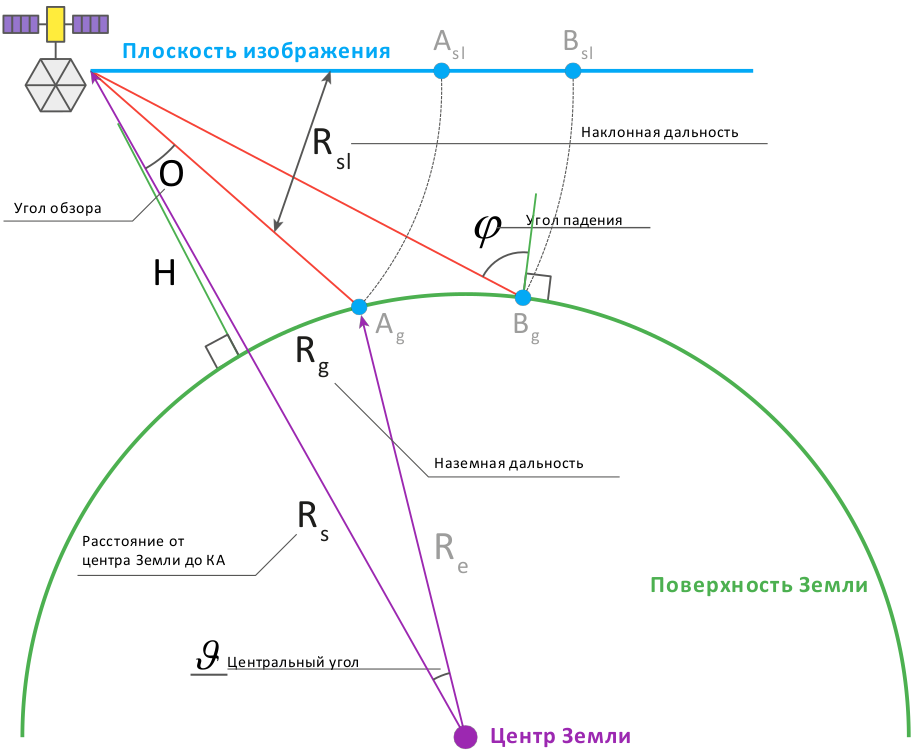
Рисунок 7. Геометрия радиолокационной съемки,
наземная и наклонная дальности
Из-за бокового обзора на синтезируемом РЛИ в направлении наклонной дальности (поперек линии пути) изменяются расстояния между объектами и изображение получается сжатым в этом направлении. На Рисунке 8 приведен пример фрагмента РЛИ в исходной проекции наклонной дальности. На РЛИ хорошо видны сжатые передние склоны гор.
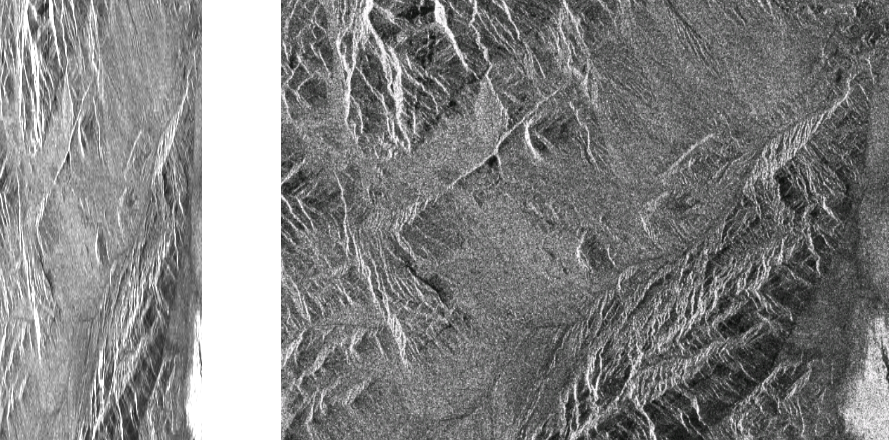
Рисунок 8. Пример РЛИ в антенной системе координат
в проекции наклонной дальности
Боковой обзор является причиной ряда геометрических и радиометрических искажений на формируемых РЛИ. Радиометрические искажения связаны с тем, что электромагнитные волны распространяются прямолинейно и в используемых спектральных диапазонах практически не рассеиваются в атмосфере. Из-за этого от наземных объектов на РЛИ формируются так называемые радиолокационные тени. Ниже, на Рисунке 9, приведен пример РЛИ с наличием радиолокационных теней.

Рисунок 9. Пример РЛИ с наличием радиолокационных теней
Что касается геометрических искажений, то они появляются, прежде всего, из-за влияния рельефа на значение наклонной дальности. Но даже на ровной поверхности разница между значениями наклонной дальности для соседних объектов будет изменяться при изменении угла обзора. Из-за перепада высот на склонах гор может наблюдаться эффект сжатия или растяжения изображений. Этот эффект проявляется тем сильнее, чем больше угол падения. Примеры растяжения / сжатия для различных углов падения приведены на Рисунках 10 — 12.
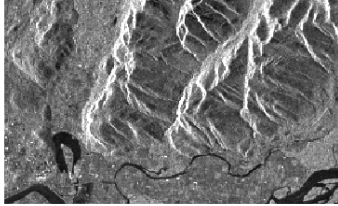
Рисунок 10. Эффект растяжения / сжатия, угол падения — 47 грд
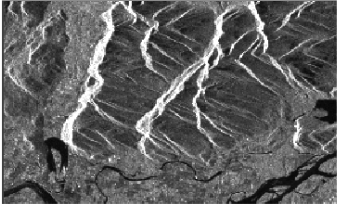
Рисунок 11. Эффект растяжения / сжатия, угол падения — 36 грд
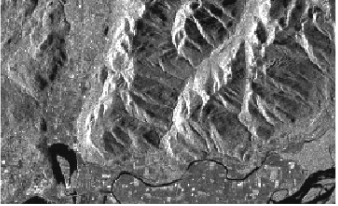
Рисунок 12. Эффект растяжения / сжатия, угол падения — 23 грд
При резких перепадах высот передних склонов может наблюдаться эффект перекрытия объектов (Рисунок 13), когда на изображении склоны перекрывают изображение подножия возвышенности.
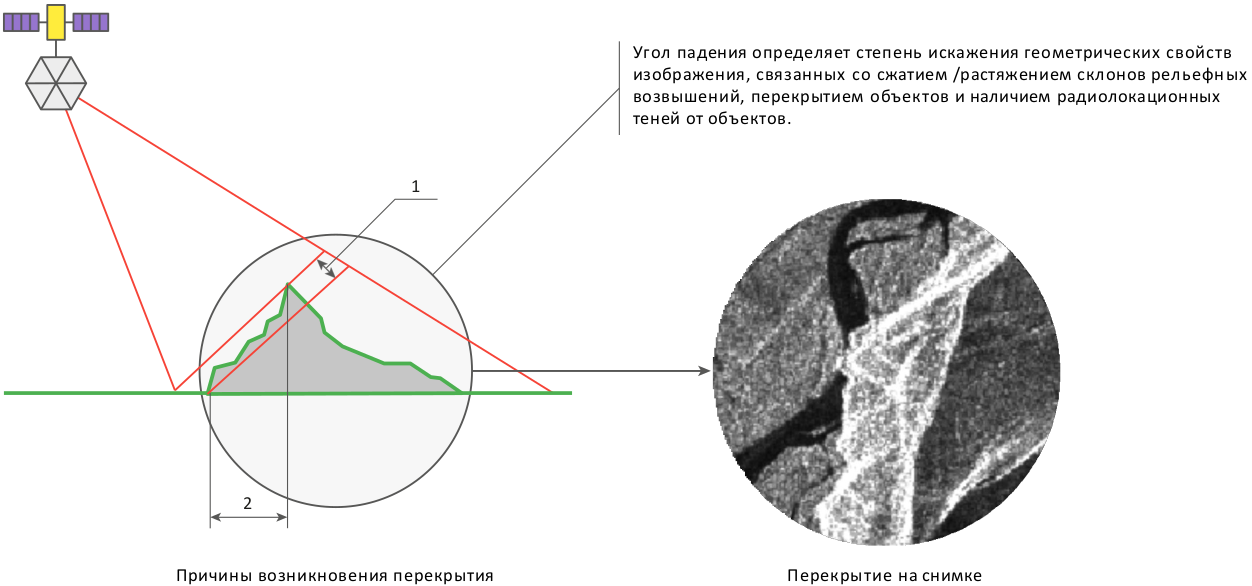
Рисунок 13. Условия и проявление эффекта перекрытия объектов
Спектральные диапазоны длин волн
Радиолокационная съемка выполняется в радиодиапазоне электромагнитного спектра с длинами волн от 1 мм до 1 м. Наиболее часто используемые диапазоны принято классифицировать и обозначать следующим образом:
Основные диапазоны радиолокационных съемочных систем
|
Диапазон |
Длина волны, см |
Частота, ГГц |
|
Ku |
1.67 — 2.5 |
18 — 12 |
|
X |
2.5 — 3.75 |
12 — 8 |
|
C |
3.75 — 7.5 |
8 — 4 |
|
S |
7.5 — 15 |
4 — 2 |
|
L |
15 — 30 |
2 — 1 |
|
P |
30 — 100 |
1 — 0.3 |
Задача оптимального выбора рабочих диапазонов длин волн для РСА является ключевой при проектировании радиолокационной аппаратуры ДЗЗ. При выборе длины волны исходят из поставленных задач для съемочной системы, требуемого разрешения и свойств электромагнитных волн того или иного спектрального диапазона.
Длина волны определяет проникающую способность излучения, принципиальный уровень пространственного разрешения и уровень спекл-шума.
Спекл-шум образуется в результате когерентного суммирования отраженных электромагнитных волн от пространственно случайных источников рассеяния, попадающих в элемент разрешения РСА. Из-за этого на изображении однородного фона появляется пятнистость, вызванная флуктуациями суммарного процесса при переходе от одного элемента к другому. Спекл-шум ухудшает радиометрическое разрешение РЛИ. Для снижения спекл-шума применяют различные методы фильтрации РЛИ. Но это приводит к потере пространственного разрешения РЛИ, а также полезной информации, содержащейся в спекл-шуме, которая может быть использована для идентификации пространственно распределенных объектов. Пример проявления спекл-шума на РЛИ представлен на Рисунке 14.
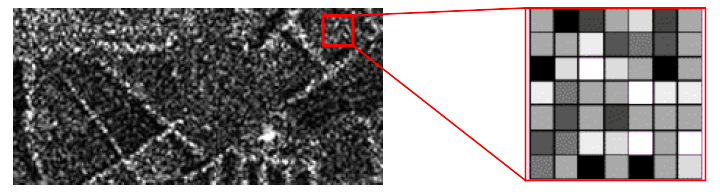
Рисунок 14. Пример проявления спекл-шума на РЛИ
Технические возможности использования того или иного диапазона длин волн определяются ограничениями, задаваемыми Регламентом Радиосвязи. Получение разрешающей способности РСА поперек линии пути (по наклонной дальности) в доли метра возможно в Ku-, X- либо в C-диапазонах волн. Разрешение 1 м и больше возможно также в S-диапазоне.
С одной стороны, при уменьшении длины волны уменьшается проникающая способность электромагнитного излучения (мешающим фактором могут становиться даже атмосферные изменения) и увеличение уровня спекл-шума, с другой, при увеличении длины волны при неизменных параметрах съемки ухудшается достижимое азимутальное разрешение синтезированного РЛИ (Рисунок 15).
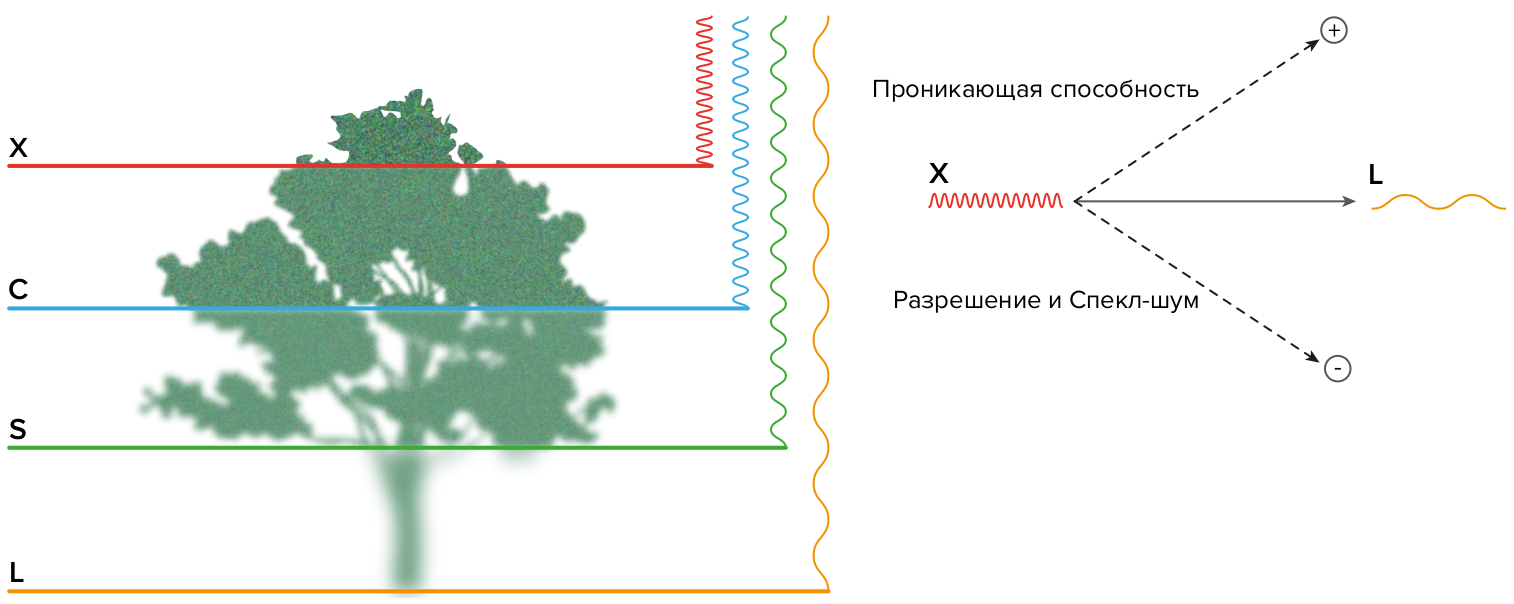
Рисунок 15. Зависимость проникающей способности и разрешения
от длины волны
При большей длине волны для сохранения разрешения в азимутальном направлении (вдоль линии пути) требуется увеличивать длину синтезированной апертуры (обеспечивается увеличением длительности съемки одних и тех же объектов), что приводит к изменениям в структуре получаемых сырых данных, обусловливающих усложнение их обработки, появление искажений РЛИ и ухудшение азимутального разрешения. В то же время, длинные волны обладают лучшей проникающей способностью, например, через растительный покров, что актуально при решении таких задач, как геологическая разведка и картографирование, обнаружение искусственных объектов под покровом леса, получение цифровых моделей рельефа. Также, использование более длинных волн дает уменьшение уровня спекл-шума на получаемых РЛИ.
Следует также учитывать и различие отражающих свойств объектов в разных частотных диапазонах. Визуальные свойства радиолокационных снимков растительного покрова, а также геологических особенной земной поверхности выше (более выражены) в дециметровом L-диапазоне (λ = 15 — 30 см, достижимое разрешение — от 3 м) и в близком к нему S-диапазоне, чем в X- и C-диапазонах. Использование Ku-диапазона, несмотря на возможность получения РЛИ субметрового разрешения, имеет ограниченные возможности в силу малой проникающей способности и высокого уровня спекл-шума. Применение Ku-диапазона целесообразно, например, для получения изображений ледникового покрова.
Поляризация
Одним из неотъемлемых свойств электромагнитных волн, наряду с амплитудой и фазой, является поляризация. Фиксация и анализ поляризационных параметров сигналов позволяет повысить информативность радиолокационных данных и расширить возможности в части обнаружения и дешифрирования снимаемых объектов, анализа их свойств и классификации.
Поляризация определяется направленностью вектора электрической составляющей (E) волны в плоскости, перпендикулярной направлению распространения радиоволны. Иллюстрация горизонтальной и вертикальной поляризации волн показана на Рисунке 16.
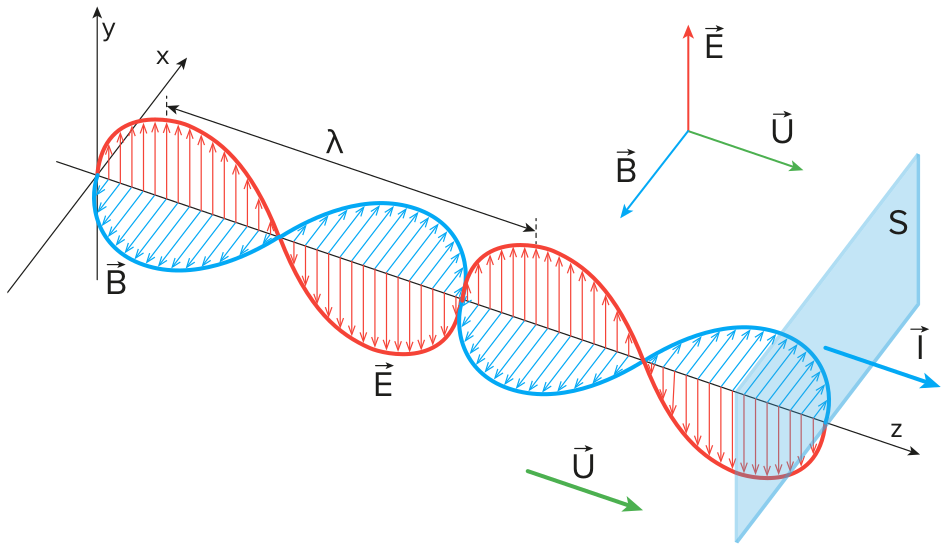
Рисунок 16. Схема горизонтальной и вертикальной поляризации волн
Поляризация может быть плоской (вектор Е меняет направление в одной плоскости), круговой и эллиптической. При горизонтальной поляризации вектор E электрического поля параллелен наблюдаемой поверхности. При вертикальной поляризация вектор E лежит в плоскости, проходящей через ось диаграммы направленности и перпендикулярной поверхности, и направлен под углом падения волны к местной вертикали.
На практике при радиолокационном наблюдении при передаче используют зондирующие сигналы в основном с плоской поляризацией (горизонтальной или вертикальной, реже круговой). РСА могут быть однополяризационными либо поляризационными. В однополяризационных РСА излучение и прием сигналов ведутся с согласованными поляризациями: вертикальная (VV), горизонтальная (ГГ) или круговая. В поляриметрических РСА реализована возможность передачи и приема в различных поляризациях (вертикальная либо горизонтальная). Соответственно, возможны различные комбинации поляризаций на передачу / прием: VV, VH, HH, HV.
Известно, что объекты простой формы (сфера, уголковый отражатель) дают отраженный сигнал только при согласованных поляризациях излучения и приема (VV, HH). Вертикальные линейные объекты (столбы, трубы, деревья и т.п.), а также горизонтальные линейные объекты (линии электропередач, рельсы), расположенные по направлению от РЛС, дают отражение при VV-поляризации. Горизонтальные линейные объекты, если они параллельны вектору E, дают отражение при НН-поляризации.
Произвольно направленные сложные объемные и линейные объекты дают отражения в любых комбинациях поляризаций. Если нет искажающих внешних воздействий, таких как ионосфера, то комбинации VH и HV дают одинаковый результат.
В поляриметрических РСА распространено использование следующих режимов.
Режим двух поляризаций – в этом режиме на излучение используется одна поляризация (V или H) на прием — две (V + H).
Полнополяриметрический — режим четырех поляризаций, когда на соседних зондированиях на излучение поочередно переключают поляризацию (V, H), а на прием отраженных сигналов одновременно используются два канала V и H. Для реализации этой схемы приходится удваивать частоту зондирования, что может привести к одновременному приему отраженных сигналов от предыдущих зондирований — это накладывает определенные ограничения при съемке. Аналогичным образом реализуется режим двух поляризаций в комбинации VV, HH в соседних зондированиях.
В общем случае коэффициент рассеяния земной и водной поверхности при вертикальной поляризации выше, чем при горизонтальной и перекрестной.
Ниже, на Рисунке 17, приведены примеры изображений в поляризациях HH и VV.
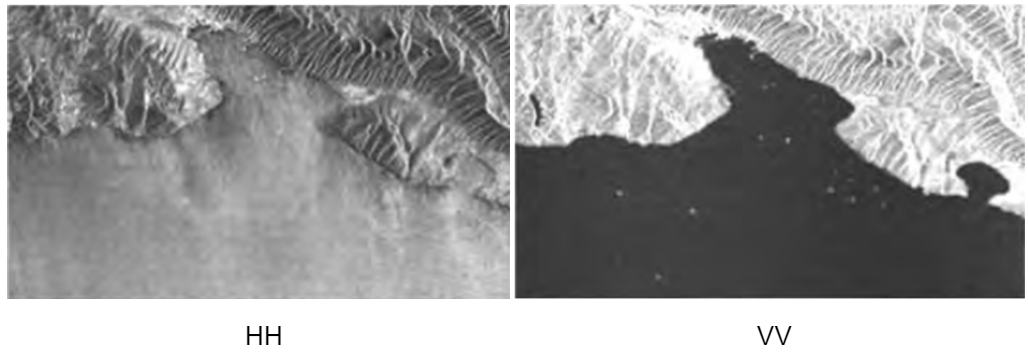
Рисунок 17. Изобразительные отличия РЛИ в разных поляризациях
Использование режима нескольких поляризаций увеличивает информативность получаемых данных радиолокационной съемки и позволяет получать новые типы продуктов, например, RGB синтез изображений с изображениями разных поляризаций в разных каналах, как показано на Рисунке 18.
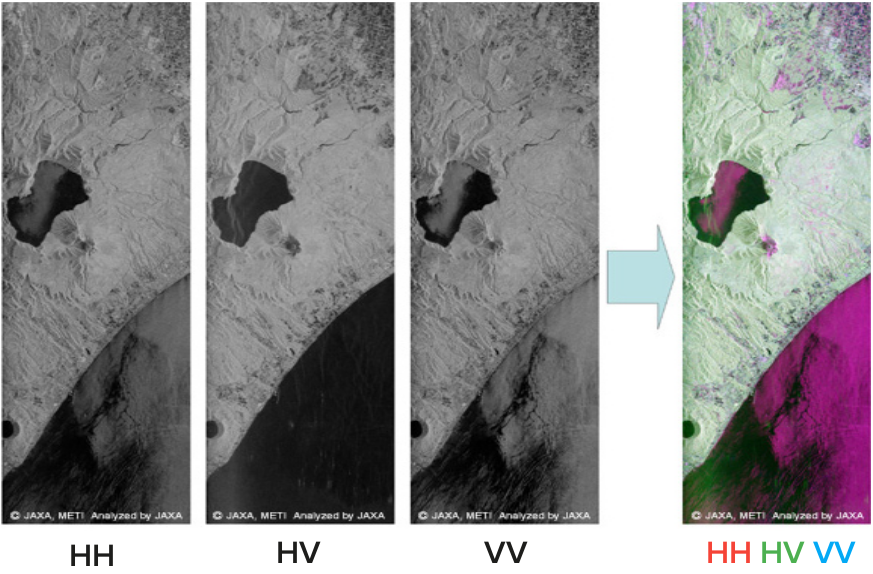
Рисунок 18. Использование РЛИ, полученных в нескольких поляризациях
Такие продукты увеличивают возможности последующего извлечения информации (обнаружение, распознавание, дешифрирование, классификация, оценка количественных и качественных характеристик объектов).
Комбинирование поляризаций позволяет улучшить распознавание различных объектов. Обработка РЛИ, сделанных одновременно в нескольких поляризационных каналах, называется поляриметрической. Уникальная особенность поляриметрических данных состоит в возможности классификации объектов на снимке по физическому типу отражения, так как каждый тип отражения по-своему отображается на снимках различной поляризации.
Модель зондирующего импульса и траекторного сигнала
При использовании короткоимпульсного сигнала необходимо обеспечить большое значение мощности передаваемого излучения для получения приемлемых значений отношения сигнал/шум принимаемых отраженных сигналов. Это трудно реализовать в условиях жестких ограничений на массо-габаритные параметры КА. Чтобы обойти эти ограничения используют сигналы малой мощности, но большой длительности. Высокое разрешение достигается путем сжатия принимаемых сигналов. Для получения высокого разрешения необходимо обеспечить определенную ширину спектра формирующих зондирующих импульсов. Это достигается за счет применения внутриимпульсной фазовой модуляции сигнала. Самыми распространенными сигналами такого типа являются сигналы с внутриимпульсной линейной частотной модуляцией (ЛЧМ), при которой частота сигнала в пределах его длительности изменяется по линейному закону. Фаза такого сигнала, соответственно, изменяется по квадратичному закону. На Рисунке 19 представлено изображение вещественной части ЛЧМ сигнала с нулевым значением частоты по центру интервала излучения.

Рисунок 19. Пример квадратурной составляющей ЛЧМ сигнала
Для обеспечения высокого разрешения вдоль подспутниковой трассы движения КА (в азимутальном направлении) необходимо сформировать диаграмму направленности антенны с очень узким главным лепестком, ширина которого не превышала бы требуемого значения разрешения. Этого теоретически можно было бы достигнуть при длине антенны в несколько километров, что, практически, конечно же, невозможно. Поэтому осуществляют формирование так называемой синтезируемой апертуры антенны, когда за счет движения КА и поворота оси ДНА обеспечивают облучение одного и того же участка местности в течение заданного времени.
За счет движения фазового центра антенны изменяется расстояние от него до наземных объектов, что приводит к изменению набега фазы принимаемых отраженных от объектов сигналов пропорционально расстоянию до них. Изменение расстояния до одного и того же объекта имеет приблизительно квадратичный характер, поэтому набег фазы отраженного сигнала также будет изменяться по квадратичному закону. Фиксируя и накапливая отраженные от объекта сигналы с частотой равной их излучению будем получать на выходе траекторный сигнал, фаза которого изменяется по квадратичному закону, а частота, соответственно, по линейному. Т.е. будет формироваться ЛЧМ сигнал, который можно сжать и получить отклик от объекта с высоким разрешением в азимутальном направлении.
Формирование радиолокационной голограммы
В процессе радиолокационной съемки осуществляется последовательное излучение зондирующих импульсов с определенной частотой повторения, их детектирование после переотражения, дискретизация с частотой аналого-цифрового преобразователя (АЦП) и запись на бортовой носитель.
Частота зондирующих импульсов рассчитывается таким образом, чтобы не допустить наложения при приеме отраженных сигналов, сформированных в соседних зондированиях.
При детектировании каждый принятый импульс дискретизируется и записывается в файл в виде строки пикселей (строка дальности), каждый импульс — своя строка. В результате формируется двумерная комплексная радиоголограмма.
Каждой строке ставится в соответствие время начала приема, это время называют медленным или азимутальным.
Каждый импульс принимается в течение заданного временного интервала, называемого стробом дальности. Пикселю каждой строки соответствует свой момент времени дискретизации и соответствующая наклонная дальность. Время, соответствующее пикселям строки называют быстрым. На Рисунке 20 показана схема формирования радиолокационной голограммы.
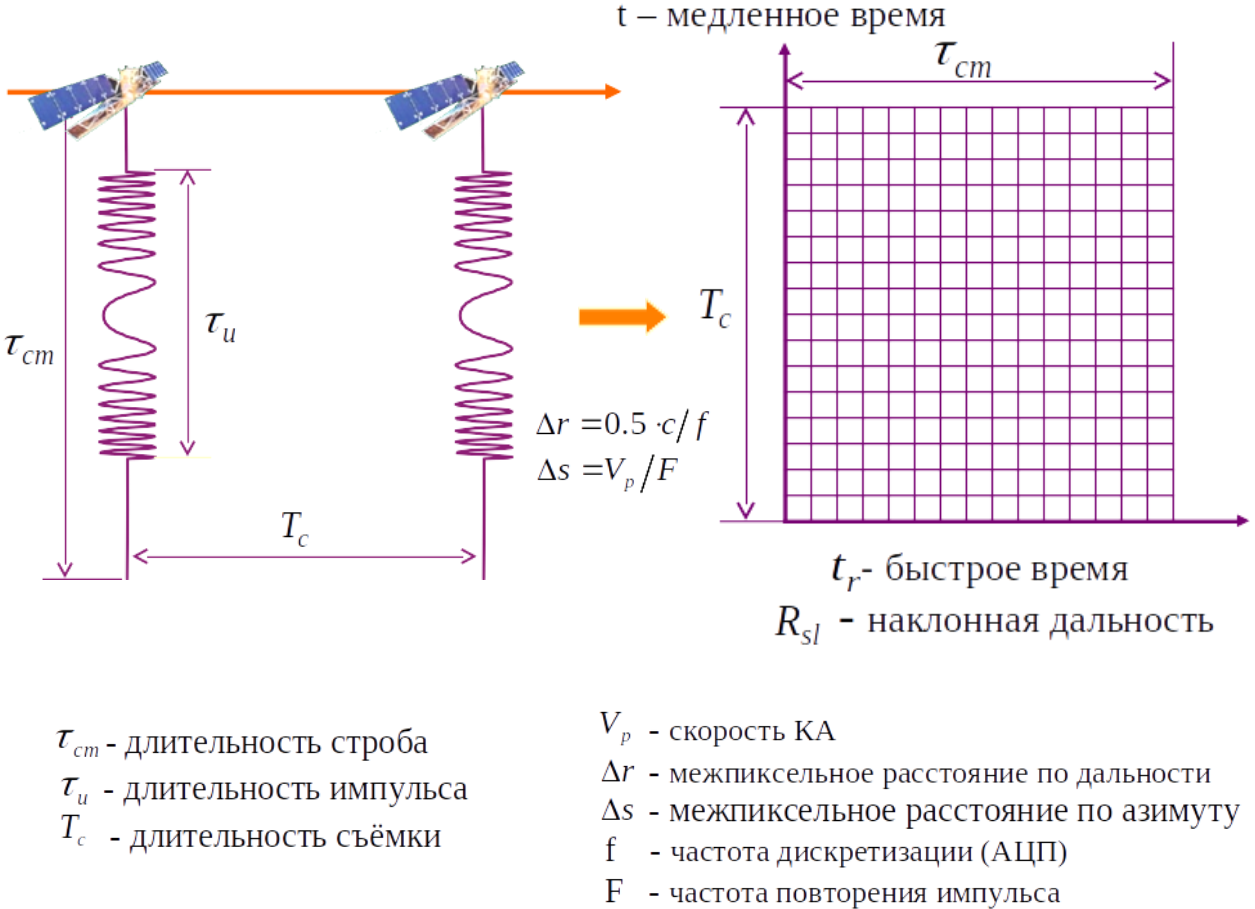
Рисунок 20. Схема формирования радиолокационной голограммы
При детектировании отраженного сигнала фиксируется изменение его амплитуды и фазы. На практике эти амплитуда и фаза пересчитываются в квадратурные (вещественная и мнимая) составляющие комплексного сигнала. На Рисунке 21 представлено изображение участка вещественной составляющей двумерной комплексной радиоголограммы от одиночной точечной цели.
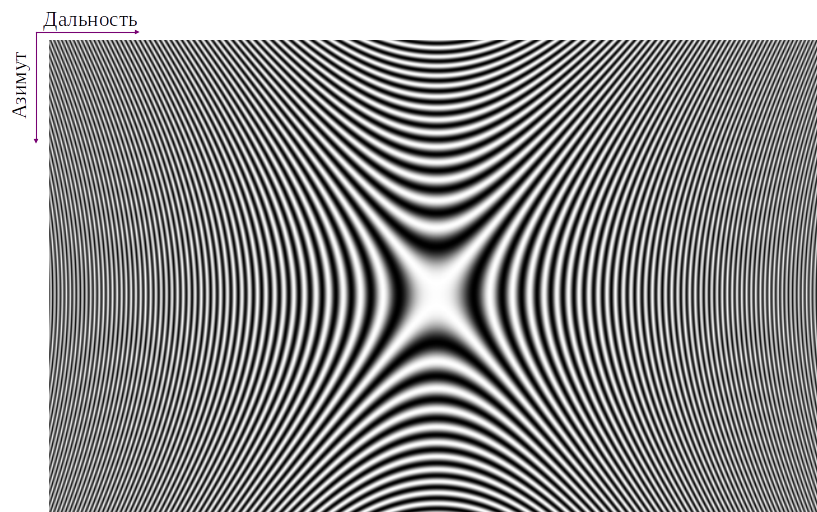
Рисунок 21. Вещественная составляющая комплексной радиоголограммы
Режимы радиолокационной съемки
Практическое применение получили следующие режимы съемки: маршрутный режим, детальный прожекторный режим и обзорный режим.
Маршрутный режим. В маршрутном режиме съемка осуществляется с фиксированным положением оси ДНА относительно связанной с.к. КА. Незначительные отклонения ориентации оси могут иметь место с целью отслеживания направления, при котором обеспечивается нулевое доплеровское смещение частоты принимаемых сигналов. Такое смещение обусловлено, прежде всего вращением Земли, а также флуктуациями ориентации КА в процессе съемки. Размеры РЛИ, получаемого в маршрутном режиме фиксированы по дальности, а размеры по азимуту определяются длительностью съемки. На Рисунке 22 представлены схема съемки и пример радиоголограммы в маршрутном режиме.
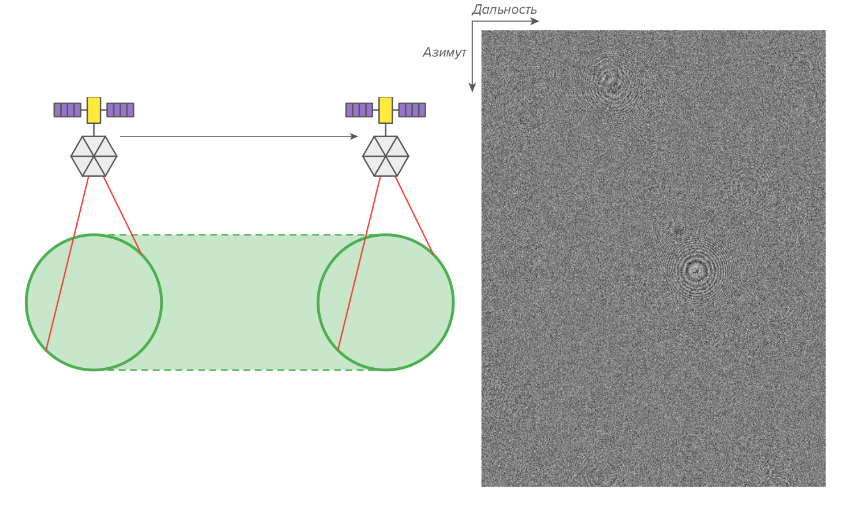
Рисунок 22. Радиолокационная съемка в маршрутном режиме
Характерные концентрические круги на радиоголограмме соответствуют положению ярких отражателей на земной поверхности.
Обзорный режим. Предназначен для обеспечения широкой полосы съемки, что достигается за счет ухудшения разрешения. Применяется, в основном, для наблюдения за морской поверхностью.
Обзорный режим работы РСА использует технологию дискретного сканирования лучом антенны в угломестной плоскости. Общая полоса обзора делится на несколько суб-полос. В каждой суб-полосе поверхность облучается пачками импульсов с пропусками между пачками. Радиоголограмма в этом режиме представляет собой набор пачек строк сигналов, соответствующих суб-полосам. Схема и пример радиоголограммы, полученной в обзорном режиме, показаны на Рисунке 23.
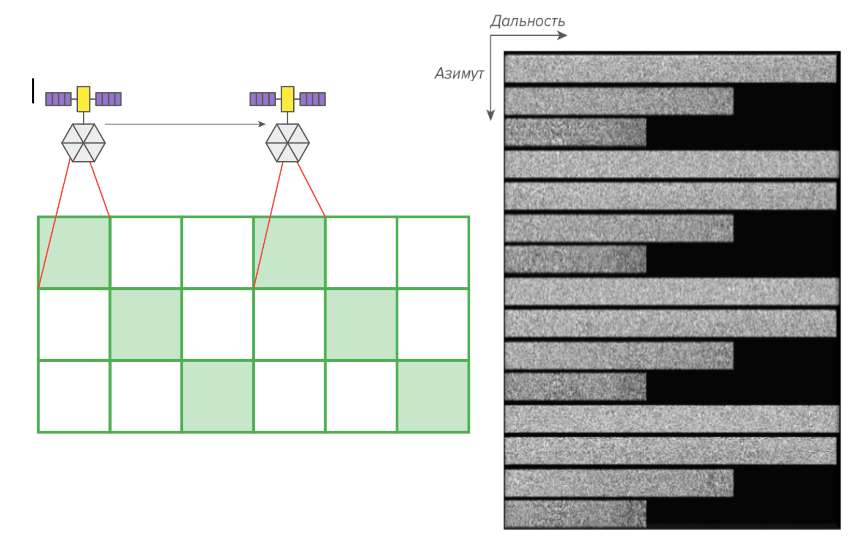
Рисунок 23. Радиолокационная съемка в обзорном режиме
Детальный прожекторный режим. Предназначен для получения РЛИ метрового и субметрового разрешения. В детальном прожекторном режиме в течение сеанса съемки облучается фиксированный участок поверхности. Для этого осуществляется непрерывный поворот оси диаграммы направленности антенны. Поворот оси диаграммы осуществляется механически либо электронным способом в зависимости от типа установленной антенны.
Механический поворот необходим при использовании антенны с зеркальным отражателем.
Электронное управления ДНА (направление луча в нужном направлении без поворота самой антенны) возможно при использовании активной фазированной антенной решетки (АФАР). АФАР состоит из независимых активных излучающих элементов (фазовых вращателей), каждый из которых состоит из излучающего элемента и приемопередающего модуля. Направление оси ДНА задается за счет распределения начальных фаз сигналов, излучаемых каждым активным элементом.
Длина синтезированной апертуры определяется длительностью съемки и диапазоном углов сканирования. Ниже, на Рисунке 24, представлены схема съемки и примеры моделей радиоголограммы для двух точечных целей (слева) и многоцелевой обстановки (справа).
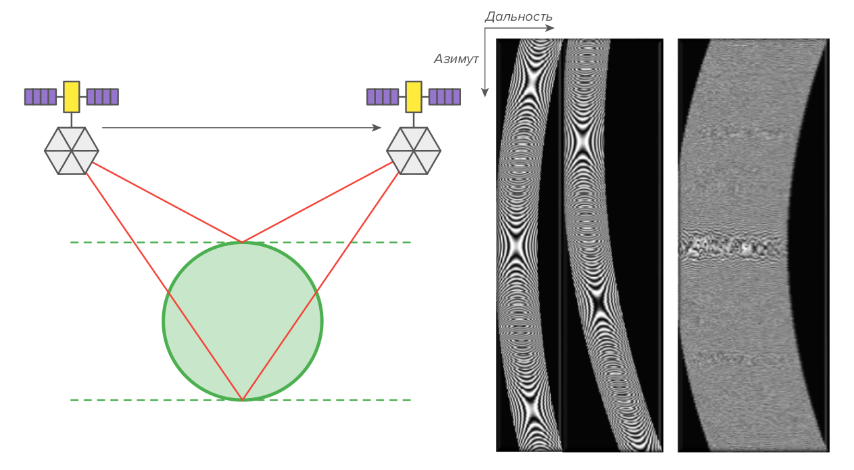
Рисунок 24. Радиолокационная съемка в детальном прожекторном режиме. Примеры радиоголограмм для 2-х точеныных целей (слева)
и для многоцелевой обстановки (справа)
В детальном прожекторном режиме наклонная дальность до объектов изменяется в довольно большом диапазоне, что приводит к значительному изменению времени задержки отраженных сигналов в процессе съемки. При приеме отраженных сигналов время начала строба детектирования каждого зондирования относительно предыдущего фиксировано, что приводит к так называемой миграции траекторного сигнала по каналам дальности на радиоголограмме. Это хорошо видно на рисунке выше. При этом характер миграций зависит от положения цели в области съемки. На изображении радиоголограммы от двух точечных целей радиоголограмма слева соответствует цели в центре (по азимутальному направлению) области, справа — цели на краю области.
Информационные продукты стандартной обработки
При стандартной обработке осуществляется синтез РЛИ из радиоголограммы, последующая передискретизация из с.к наклонной дальности в с.к. наземной дальности, а также перепроецирование в геодезическую с.к. с учетом или без учета рельефа. Различают следующие уровни информационных продуктов:
Радиолокационная голограмма (уровень 0). Комплексные данные, содержащие распакованную и восстановленную информацию радиолокационного наблюдения. Строки радиолокационной голограммы соответствуют принятым отраженным от земной поверхности электромагнитным импульсам, излучаемых РСА в процессе съемки.
Синтезированное изображение (уровень 1А). Комплексное РЛИ в антенной с.к. в проекции наклонной дальности, содержит как амплитудную, так и фазовую информацию.
Геореференцированное изображение (уровень 1В). Амплитудное изображение в антенной с.к. в проекции наземной дальности.
Геокодированное изображение (уровень 2А). Амплитудное изображение, приведенное к одной из картографических проекций без учета рельефа с использованием наземных опорных точек или без них.
Орторектифицированное изображение (уровень 2В). Амплитудное изображение, приведенное к одной из картографических проекций с учетом рельефа. Операция проводится с привлечением цифровой модели рельефа (ЦМР) покрываемой снимком местности.
Информационные продукты высокоуровневой обработки
При высокоуровневой обработке осуществляется формирование ЦМР, мозаик изображений а также тематическая обработка. Можно выделить следующие основные виды продуктов высокоуровневой обработки:
Мозаика изображений — два или более радиолокационных амплитудных изображений, «сшитых» в единое изображение по географическим или файловым координатам.
Выделение изменений на местности во времени — для выделения изменений осуществляется обработка парных амплитудных изображений участка поверхности, снятых в разное время.
Цифровая модель местности — осуществляется интерферометрическая обработка парных комплексных изображений уровня 1A одного участка поверхности, полученных под разными углами или при бистатической съемке (тандем) с построением ЦММ.
Изображение с селекцией движущихся объектов — проводится интерферометрическая обработка данных при работе радиолокатора двумя половинами АФАР.
Типовые сценарии обработки данных РЛН
При создании продуктов стандартной и высокоуровневой обработки предполагается реализация определенной цепочки формирования технологических уровней обработки и выходных информационных продуктов. Схема обработки представлена на Рисунке 25.
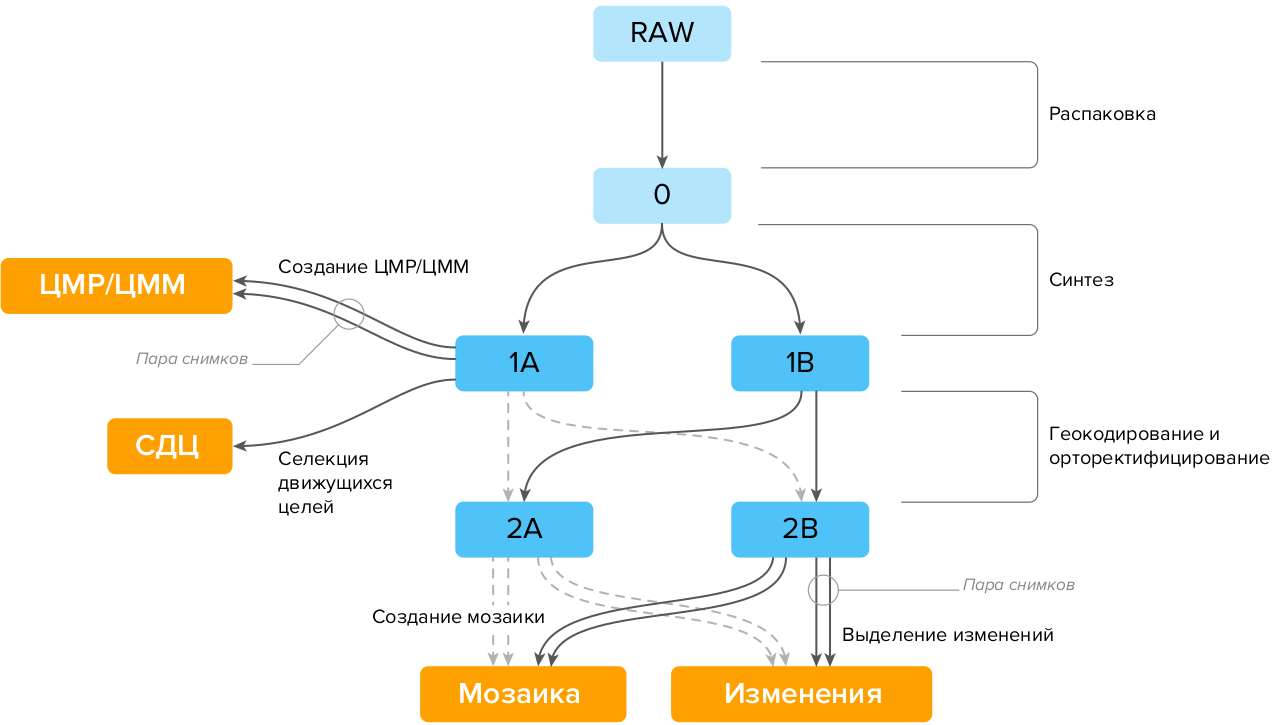
Рисунок 25. Сценарии обработки данных РЛН
Исходными для обработки являются сырые данные радиоголограммы, получаемые с борта КА по радиолинии с сопутствующей служебной информацией. Сырые данные подлежат распаковке, восстановлению целевой и служебной информации, фильтрации служебных данных. В результате первичной обработки сырых данных формируется продукт уровня 0 — радиолокационная голограмма.
Радиоголограмма уровня 0 является уровнем хранения и входным уровнем данных для последующего синтеза и формирования РЛИ уровней 1А либо 1В. Продукты уровня как 1А, так и 1В могут служить исходными данными для формирования геокодированных и орторектифицированных изображений (уровни 2А и 2В).
Для формирования ЦМР и ЦММ, а также продуктов с селекцией движущихся целей могут быть использованы только РЛИ уровня 1А, т.к. данные этого уровня являются комплексными и содержат как амплитудную так и необходимую для создания продуктов фазовую информацию.
В качестве входных данных для построения ЦМР и ЦММ используются парные комплексные изображения уровня 1A одного и того же участка местности, снятых либо на близких по времени витках орбиты, либо полученных в условиях бистатической съемки тандемом аппаратов.
В качестве входных данных для продукта «Изображение с селекцией движущихся объектов» используется одно изображение уровня 1A, полученного в специальном режиме съемки при работе радиолокатора двумя половинами АФАР.
При создании мозаик и выделения изменений на местности используются два или более продуктов уровней 2А или 2В, изображение которых представлено в той или иной проекции.
Синтез РЛИ
Служебная информация. Для получения РЛИ помимо целевой информации (числовые значения отсчетов радиолокационной голограммы) необходимо наличие служебной информации, содержащей параметры съемочной аппаратуры и процесса съемки. В состав служебной информации входят:
Параметры планирования съемки:
-
время начала и окончания съемки;
-
режим съемки (маршрутный, обзорный, прожекторный);
-
геодезические координаты точки прицеливания (центр кадра).
Параметры геометрической и радиометрической калибровки:
-
конструктивные углы ориентации антенны относительно платформы КА;
-
конструктивные углы ориентации звездных датчиков относительно платформы КА;
-
форма диаграммы направленности антенны;
-
зависимости коэффициента отражения сигнала от угла визирования для различных типов поверхности (суша, вода, лед, смешанный тип, городская застройка, широколиственные леса амазонки и др.).
Параметры бортовой служебной информации:
-
данные положения и скорости КА на маршруте съемки;
-
данные ориентации КА на маршруте съемки (кватернионы ориентации) либо данные ориентации звездных датчиков;
-
данные измерений угловых скоростей;
-
признак борта (левый, правый);
-
идентификатор используемого парциального луча;
-
реплика зондирующего импульса (опционально);
-
параметры зондирующего импульса:
-
момент излучения импульса;
-
время задержки отраженного сигнала;
-
время задержки записи строба сигнала;
-
длительность строба сигнала либо число отсчетов информационной строки;
-
параметры ЛЧМ сигнала;
-
тип поляризации;
-
коэффициент автоматического усиления сигнала;
-
частота повторения импульса;
-
частота АЦП;
-
ориентация оси ДНА относительно связанной с КА с.к. (опционально);
-
параметры восстановления поврежденной информации (коды CRC, Рида-Соломона и т.п.).
-
Технологическая схема. Для синтеза РЛИ возможна реализация различных алгоритмов обработки. При синтезе РЛИ, полученных в разных режимах съемки (маршрутный, обзорный, прожекторный) могут различаться этапы обработки по составу, последовательности и необходимым математическим операциям. Поэтому представленная ниже на Рисунке 26 схема является обобщеннной, и представленные этапы обработки при практической реализации могут изменяться и иметь свои алгоритмические особенности.
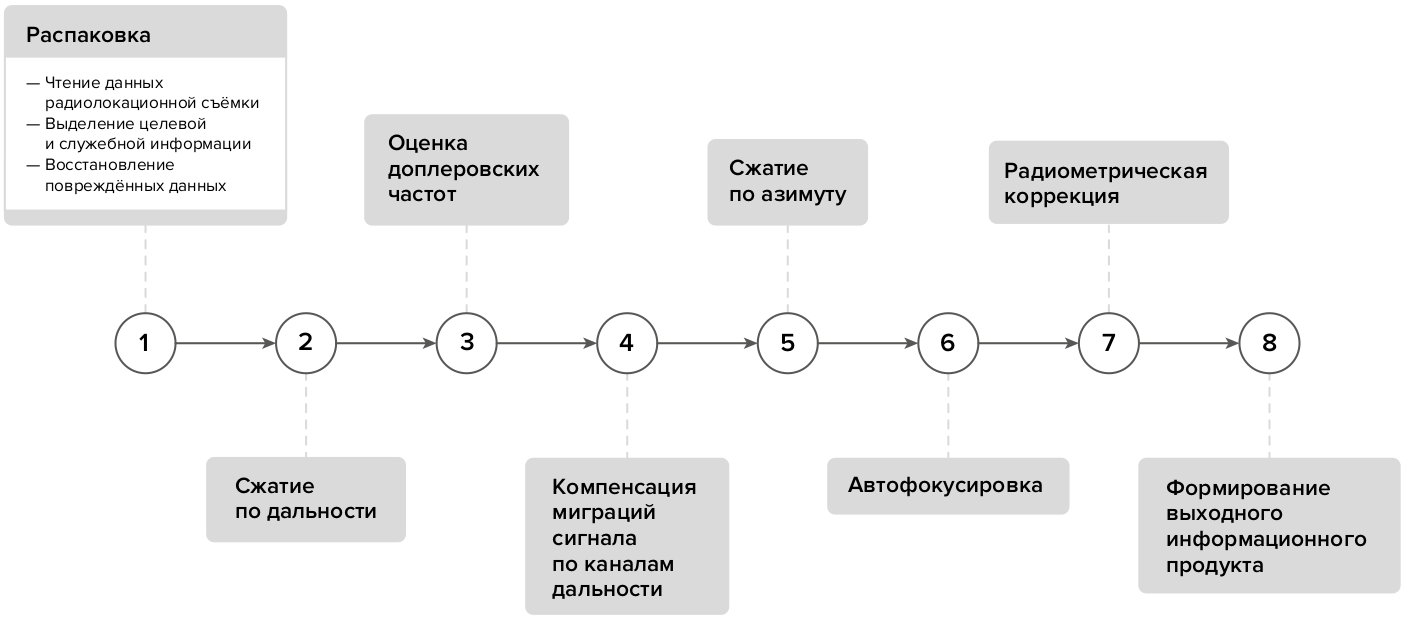
Рисунок 26. Технологическая схема процедуры синтеза РЛИ
Сжатие сигнала. Ядром процедуры синтеза РЛИ является так называемое сжатие ЛЧМ сигналов в каналах дальности и азимута, в результате которого распределенные во времени отклики целей собираются в узкие по профилю отклики с кратным увеличением мощности. Операция сжатия является результатом согласованной фильтрации данных радиолокационной голограммы. Под согласованной понимают оптимальную линейную фильтрацию, обеспечивающую максимизацию отношения сигнал-шум. Сжатие осуществляется путем комплексной свертки сигнала с опорной функцией либо с использованием гармонического анализа с привлечением опорной функции.
Опорные функции по дальности и азимуту соответствуют комплексно-сопряженным сигналам радиоголограммы от одиночной точечной цели, имеющие вид гармонической функции с ЛЧМ со своими параметрами модуляции для каналов дальности и азимута. Пример процедуры сжатия ЛЧМ сигнала показан на Рисунке 27.
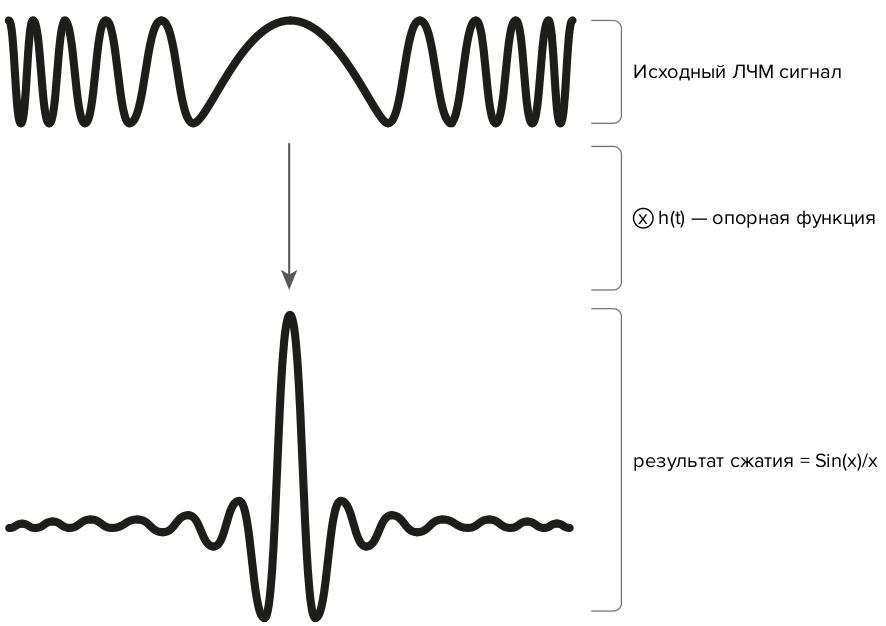
Рисунок 27. Принцип сжатия сигнала
Как было отмечено ранее, комплексная радиоголограмма является результатом детектирования суммы отраженных сигналов от множественных объектов на земной поверхности. Известно, что все этапы радиолокационного обзора поверхности с использованием РСА математически описываются в рамках теории линейных систем с выполнением соответствующих законов. В частности, результат операции над суммой сигналов равен сумме результатов операций над каждым сигналом. Это позволяет при синтезе радиоголограммы получить РЛИ как сумму сжатых откликов множества наземных точечных целей и, таким образом, разрешить (разделить) отдельные цели на РЛИ.
Оценка доплеровских частот. В процессе съемки возможны отклонения оси диаграммы направленности антенны от положения нулевого допплера, как показано на Рисунке 28.
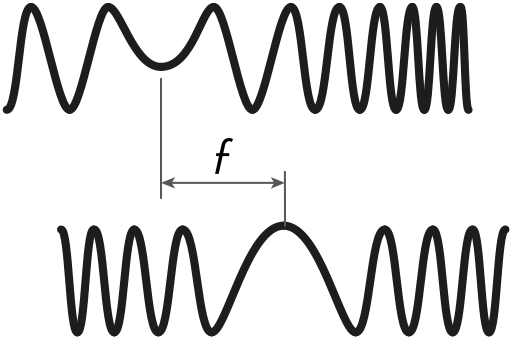
Рисунок 28. Доплеровское смещение частоты сигнала
В результате траекторный азимутальный сигнал и опорная функция будут рассогласованы по частоте. Синтез РЛИ без учета доплеровских смещений частоты приводит к смещению целей на изображении относительно их истинного положения, двоениям объектов и ухудшению фокусировки. Примеры таких дефектов показаны на Рисунке 29.
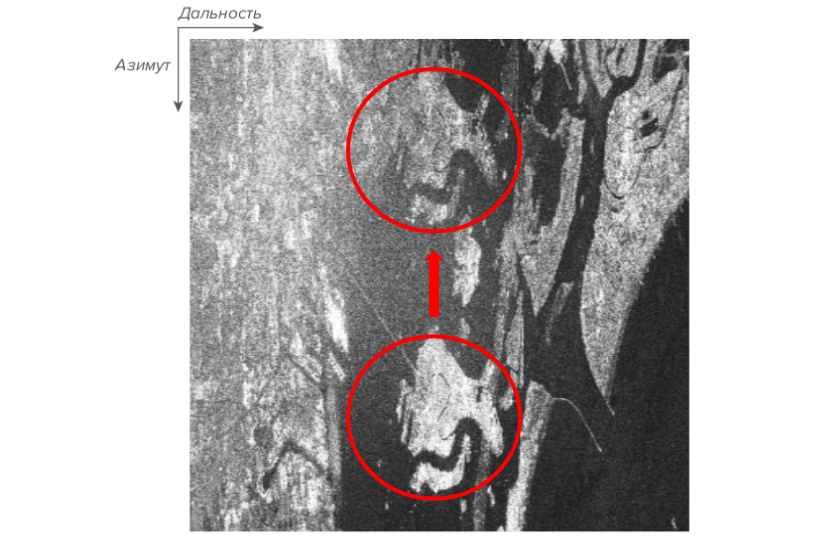
Рисунок 29. Искажения и двоения, вызываемые смещением частоты сигнала
Компенсация миграций. В процессе съемки и формирования синтезированной апертуры происходит изменение наклонной дальности до объектов. Соответственно, отраженные сигналы от одного и того же объекта приходят с меняющейся со временем задержкой, что приводит к миграции траекторного сигнала радиоголограммы по каналам дальности.
При синтезе РЛИ миграции сигналов по каналам дальности необходимо компенсировать. При съемке многоцелевой обстановки сигналы от разных целей с разным характером миграций складываются, что делает затруднительным их компенсацию. При значительной длительности съемки и крутизне миграций их компенсация может приводить к радиометрическим искажениям РЛИ и ухудшению разрешения.
Компенсация миграций осуществляется одновременно со сжатием по дальности в двумерной спектральной области путем умножения строк дальности спектра на соответствующую фазовую функцию. Изображение модели радиоголограммы с наличием миграций траекторного сигнала и результат их компенсаций представлено на Рисунке 30.
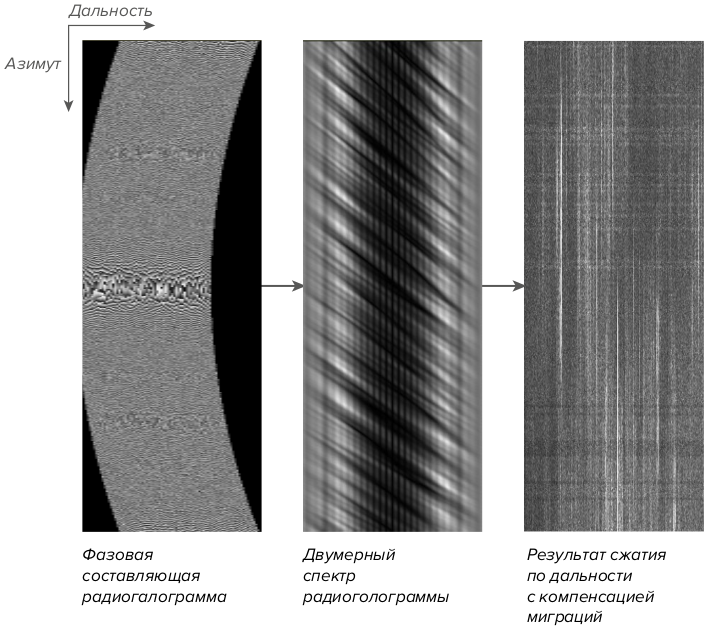
Рисунок 30. Миграции траекторного сигнала по каналам дальности
и их компенсация
Сжатие по азимуту, линейная эквивалентная скорость. Азимутальный траекторный сигнал формируется за счет фиксирования изменения фазы принимаемого отраженного сигнала от зондирования к зондированию.
Для описания азимутального траекторного сигнала орбитальное движение КА аппроксимируется линейным равномерным (Рисунок 31) с определением линейной эквивалентной скорости. Линейная эквивалентная скорость рассчитывается таким образом, чтобы при расчете спектральной полосы траекторного сигнала с ее использованием получить значение, соответствующее реальной полосе.
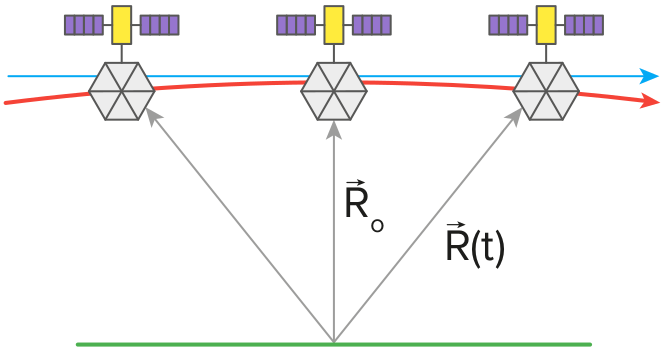
Рисунок 31. Приближение движения КА линейным прямолинейным
Значение линейной эквивалентной скорости зависит от параметров орбитального движения и геометрии обзора. При переходе от одного канала дальности к другому приходится учитывать изменение спектральной полосы траекторного сигнала, пересчитывать значение линейной эквивалентной скорости и, соответственно, азимутальной опорной функции. Для сокращения вычислительных затрат ограничиваются выбором некоторого шага по дальности, с которым делается такой пересчет. Величина шага (глубина резкости) рассчитывается таким образом, чтобы обеспечить в пределах шага сохранение достигаемого разрешения при сжатии траекторного сигнала.
Обработка в обзорном режиме. При обработке данных, полученных в обзорном режиме формируются РЛИ для отдельных парциальных лучей, которые затем сшиваются в одно изображение, как показано на Рисунке 32.
Для каждого луча используются свои значения коррекции диаграммы направленности антенны и уровень мощности сигнала, что приводит к различию в среднем уровне яркости изображений лучей. При сборке изображений парциальных лучей необходимо также учитывать разность коэффициентов сигнала усиления для разных лучей.
Геометрической стыковка изображений парциальных лучей осуществляется на основе информации о временах съемки строк и наклонной дальности отсчетов.
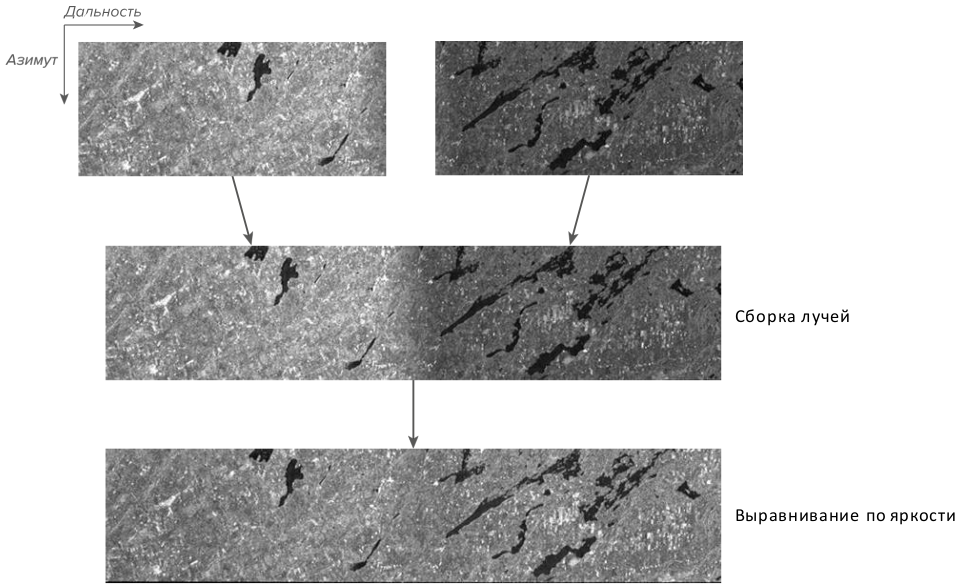
Рисунок 32. Сборка РЛИ парциальных лучей при съемке в обзорном режиме
Геореференцирование. Синтезированное комплексное РЛИ уровня 1А представлено в путевой с.к. “время съемки — наклонная дальность”. Данный уровень является незаменимым для дальнейшей высокоуровневой обработки, основанной на работе с фазовой информацией. Из-за геометрических деформаций — сжатие в направлении дальности затруднено дешифрирование таких изображений. Поэтому предусмотрено формирование изображения уровня 1В, представленного в с.к. “время съемки — наземная дальность”. При создании геореференцированного изображения для каждой строки дальности формируется выходная сетка с заданным шагом по наземной дальности. Для каждого узла сетки рассчитывается яркость пикселя на основе яркостной информации соответствующих пикселей строки дальности, получаемой в процессе синтеза РЛИ.
Результатом операции геореференцирования является изображение, представленное в антенной с.к. в проекции наземной дальности, и содержащее только амплитудную информацию. Фрагмент РЛИ в проекции наклонной и наземной дальности представлен на Рисунке 33.
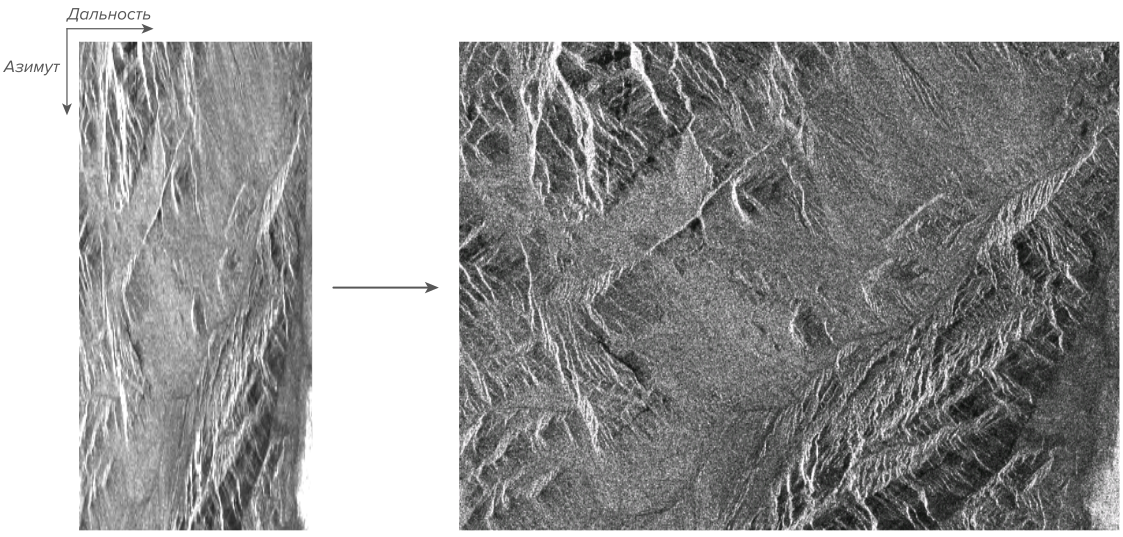
Рисунок 33. Преобразование РЛИ из наклонной в наземную дальность
Радиометрическая коррекция
Под радиометрической коррекцией подразумевается коррекция амплитудно-яркостных искажений РЛИ, таких как неравномерная яркость по полю снимка, полосы повышенной или пониженной яркости и т.п.
Учет коэффициента автоматического усиления сигнала. Исходя из соображений оптимальности использования динамического диапазона радиолокационного сигнала, при его приеме значения отраженного сигнала делятся на коэффициент автоматического усиления. Коэффициент автоматического усиления сигнала после этого записывается в заголовок со служебной информацией, сопровождающей каждую строку радиолокационных данных.
При передаче на наземную станцию приема результаты детектирования для каждой строки дальности делятся на коэффициент автоматического усиления, свой для каждой строки. Учет данных коэффициентов необходим для выравнивания яркости строк в азимутальном направлении, как это показано на Рисунке 34.
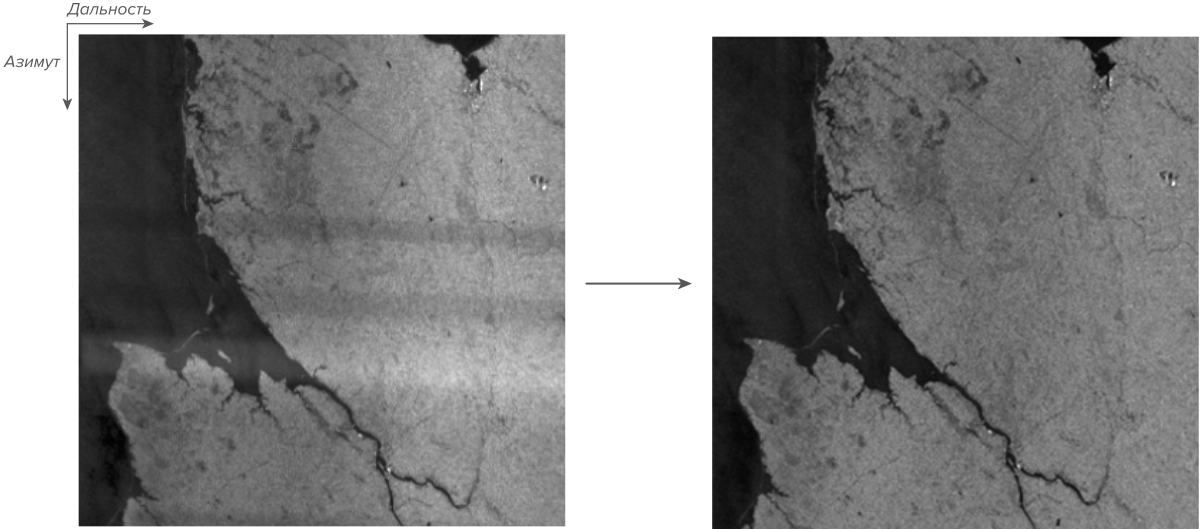
Рисунок 34. Влияние коэффициентов автоматического усиления
В случае наличия аномальных значений коэффициента усиления на синтезированном изображении могут наблюдаться полосы аномальной яркости. Устранение таких дефектов осуществляется фильтрацией значений коэффициента усиления.
Диаграмма направленности антенны. Мощность радиолокационного сигнала изменяется в направлении дальности. Закон изменения определяется ДНА по дальности. ДНА — это характеристика антенны, параметры которой определяются в результате соответствующей калибровки. Характер распределения мощности сигнала по раскрыву антенны, изменяется со временем, поэтому ДНА подлежит периодической (раз в год или несколько лет) перекалибровке.
Диаграмма направленности антенны является причиной модуляции яркости изображения в направлении дальности. Коррекция яркости по диаграмме устраняет этот недостаток. Графики зависимости мощности радиолокационного сигнала от угла обзора и влияние ДНА на распределение яркости по РЛИ представлены на Рисунке 35. (графики разных цветов соответствуют ДНА, полученным в разные моменты калибровки).



Рисунок 35. Влияние диаграммы направленности антенны — изображение, полученное без учета ДНА (вверху), с учетом ДНА (внизу)
Учет затухания сигнала и типа поверхности. Мощность отраженного радиолокационного сигнала уменьшается при увеличении дальности до цели, а также зависит от типа поверхности и угла визирования.
Для различных типов поверхности (море, суше, лед, лес, городская застройка, и т.д.) существуют свои зависимости коэффициента мощности отраженного сигнала от угла визирования. Учет зависимости степени затухания мощности отраженного сигнала от угла визирования позволяет скорректировать изменение уровня яркости в направлении дальности. Влияние затухания сигнала на РЛИ представлено на Рисунке 36.
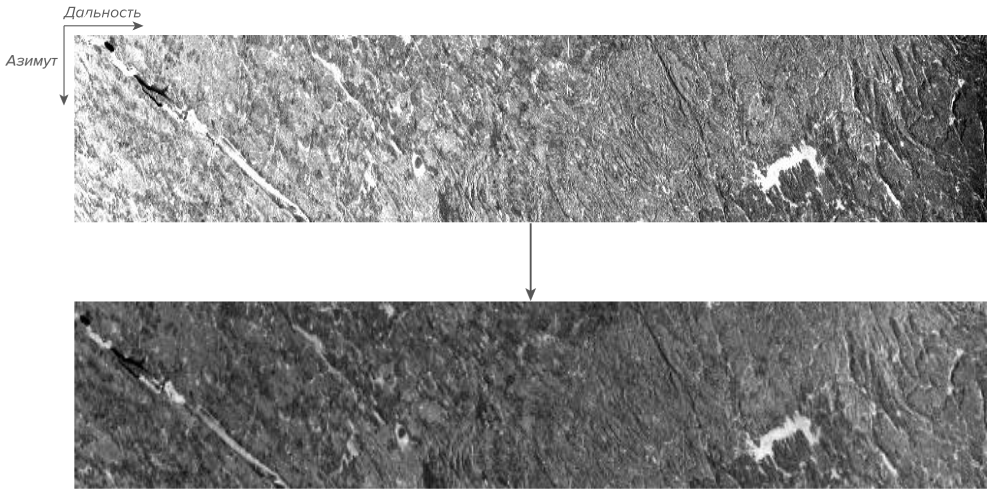
Рисунок 36. Влияние затухания сигнала на РЛИ — изображение без учета затухания сигнала (вверху) и с учетом затухания сигнала (внизу)
Высокоуровневая обработка
Геокодирование и орторектификация. Геокодирование и орторектификация (ортокоррекция) — операции приведения синтезированного РЛИ к картографической проекции без учета (геокодирование) либо с учетом (орторектификация) цифровой модели рельефа. На Рисунке 37 приведены Примеры геокодированного и орторектифицированного РЛИ.

Рисунок 37. Примеры геокодированного и орторектифицированного РЛИ
Для осуществления этих операций сначала формируется выходная сетка в заданной картографической проекции. Затем для каждого узла производится операция обратного геокодирования — расчет времени съемки и наклонной дальности для картографических координат узла. После этого путем интерполяции яркостей пикселей исходного в окрестности полученных растровых координат рассчитывается яркость узла выходного изображения.
Мозаика изображений. Мозаика изображений — два или более радиолокационных амплитудных изображений, «сшитых» в единое изображение по географическим или файловым координатам. Формирование мозаики осуществляется из геокодированных либо ортеректифицированных изображений на основе информации о географической привязке каждого РЛИ. пример мозаик, построенных с использованием нескольких РЛИ представлены на Рисунке 38.
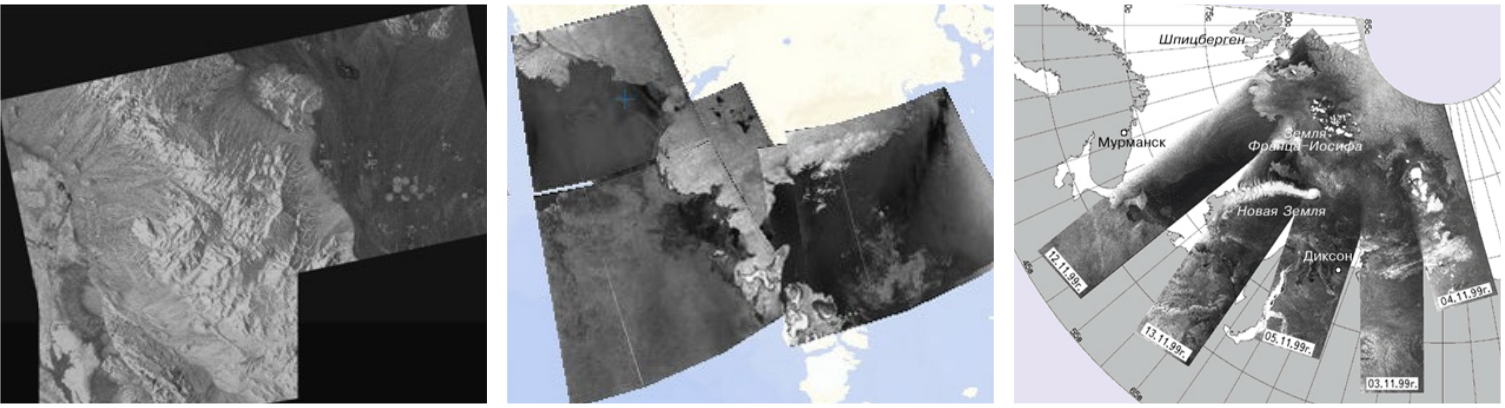
Рисунок 38. Примеры мозаик изображений
Выделение изменений на местности во времени. Для выделения изменений осуществляется обработка парных амплитудных изображений участка поверхности, снятых в разное время. Совместная обработка пары изображений, наложение, межканальное совмещение, вычитание, позволяет выделить изменения, как показано на Рисунке 39.
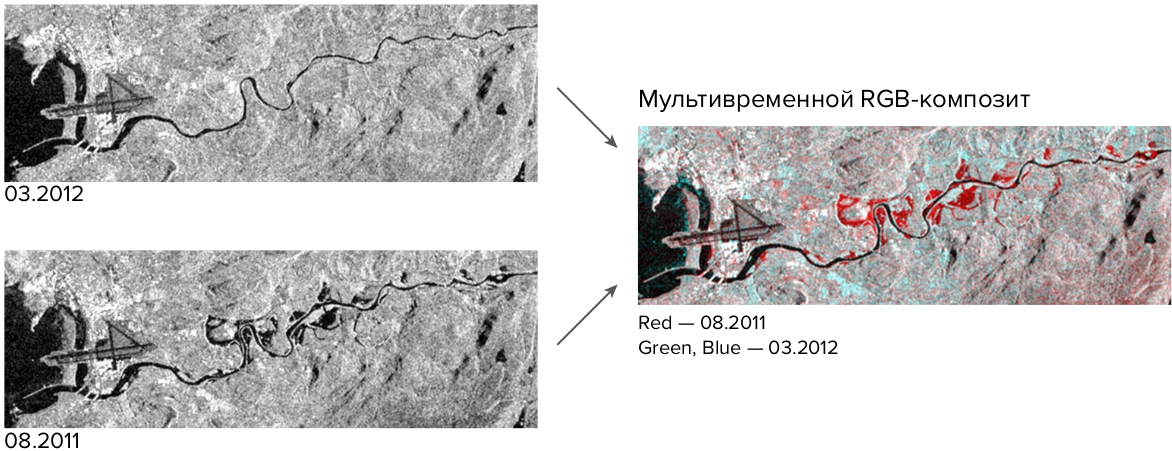
Рисунок 39. Пример выделения изменений на местности
Построение ЦМР. Формирование ЦМР осуществляется с привлечением пары комплексных РЛИ уровня 1А одного и того же участка местности, снятых под разным углом с пространственно близких положений КА. Соответствующая пара изображений образует интерферометрическую пару. На Рисунке 40 представлен пример фрагментов РЛИ интерферометрической пары.
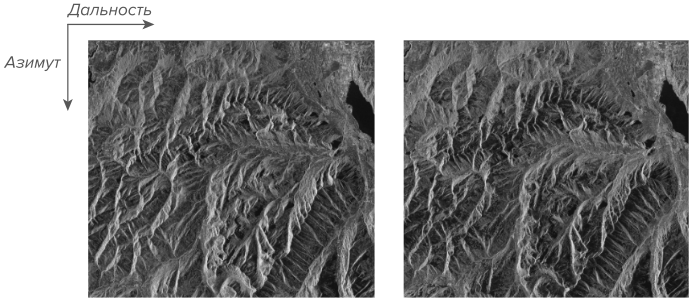
Рисунок 40. Фрагменты интерферометрической пары РЛИ
Технология интерферометрической съемки основана на обработке двух РЛИ одного и того же участка местности, полученных под отличающимися друг от друга углами съемки. При этом появляется возможность сравнить отклик сигнала от одной и той же точки, полученный при разном положении КА.
Интерферометрическая съемка может быть реализована различными способами:
-
КА с двумя РСА, жестко связанными между собой фиксированной базой (однопроходная схема);
-
КА с одним РСА выполняет повторную съемку одного участка местности с близких витков орбиты через соответствующий промежуток времени (двухпроходная схема);
-
Два разных КА с одним РСА движутся на соседних орбитах на одинаковом расстоянии. При этом один КА ведет активное излучение, и оба принимают отраженный сигнал (пример реализации — КА TanDEM-X).
Для обеспечения возможности интерферометрической обработки пары РЛИ необходимо соблюдение геометрической и временной согласованности съемки изображений. Накладываются ограничения на следующие взаимные параметры съемки:
-
Пространственная база (базовая линия) — расстояние между положениями радиолокатора при съемке изображений, составляющих интерферометрическую пару. Теоретически, точность цифровой модели местности тем выше, чем больше длина базовой линии. Но, при этом, слишком большие величины базовой линии приводят к снижению когерентности — согласованность (постоянство разности фаз) разных колебательных или волновых процессов во времени. При превышении определенной величины пространственной базы рассогласованность фазовых портретов изображений превышает допустимый уровень, что делает невозможным дальнейшую обработку.
-
Временная база — время между съемками изображений интерферометрической пары. Временная база должна быть как можно меньше, в идеале, равной нулю. При увеличении временного интервала между съемками повышается вероятность поверхностных изменений, искажающих фазовую картину изображения: изменение состояния растительного покрова, выпадение осадков и др.
На Рисунке 41 показана геометрия интерферометрической съемки пары РЛИ.
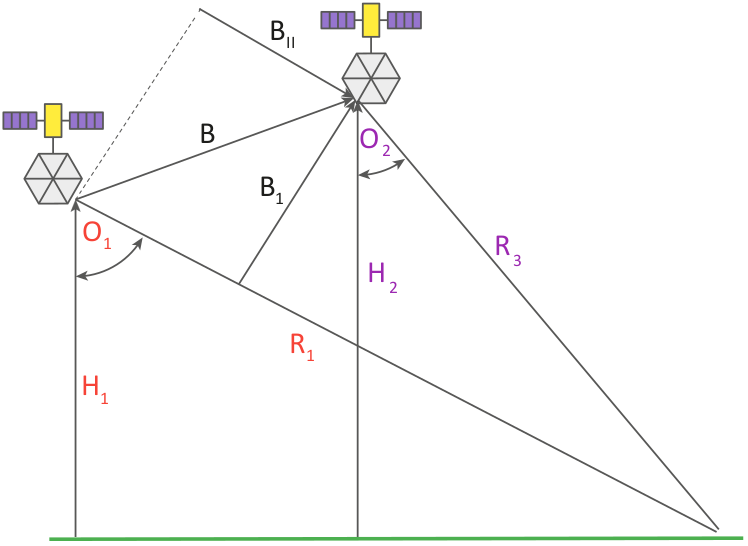
Рисунок 41. Геометрия съемки интерферометрической пары
При построении ЦМР выполняются следующие основные этапы обработки:
-
корегистрация РЛИ;
-
построение и фильтрация интерферограммы;
-
развертка фазы и вычисление матрицы абсолютных значений фазы;
-
вычисление матрицы высот и формирование ЦМР в заданной картографической проекции.
Корегистрация изображений — совмещение основного и вспомогательного изображения для обеспечения пространственного соответствия данных друг другу.
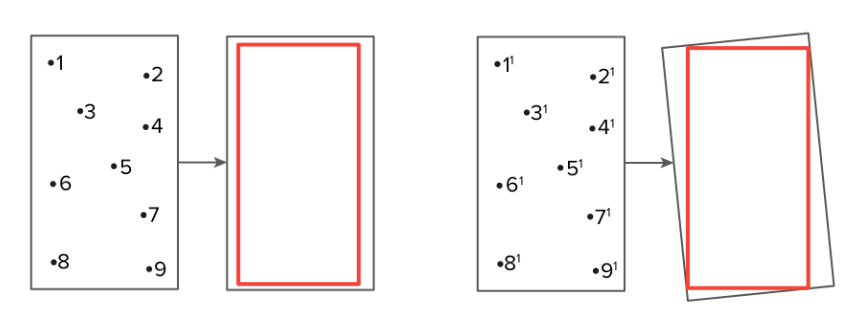
Рисунок 42. Схема корегистрации изображений интерферометрической пары (слева 1-е РЛИ, права — 2-е РЛИ, красный прямоугольник — область съемки земной поверхности, точки — опорные точки на земной поверхности и их соответствие точкам на РЛИ)
При корегистрации осуществляется поиск преобразования, трансформирующего вспомогательное изображение к основному. Осуществляется это путем максимизации результата корреляции данных по локальным областям в окрестности контрольных точек (Рисунок 42).
После корегистрации изображений интерферометрической пары осуществляется построение и фильтрация интерферограммы.
Интерферограмма — картина значений разности фаз пары изображений. В результате формируется разностно-фазовая картина поверхности по модулю 2π.
Фильтрация интерферограммы осуществляется для повышения отношения сигнал/шум. На Рисунке 43 показаны фрагменты интерферограммы до и после фильтрации.
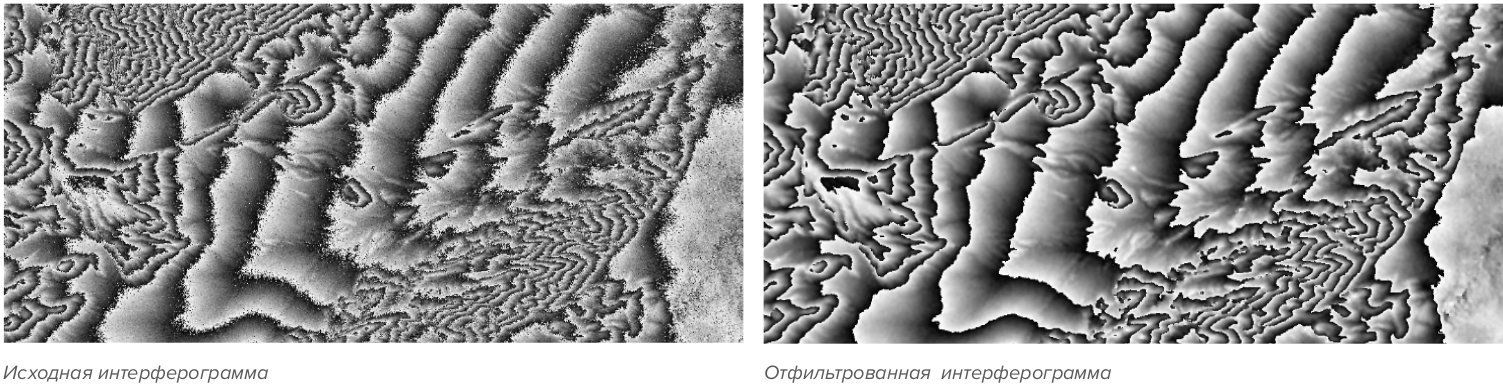
Рисунок 43. Фрагмент интерферограммы до (слева)
и после (справа) фильтрации
При развертке фазы осуществляется пересчет относительных значений интерферограммы из интервала (0 — 2π) в абсолютные значения фазы. Матрица абсолютных значений фазы пересчитывается в матрицу высот, которая далее используется для формирования ЦМР в заданной картографической проекции. Цепочка преобразований от интерферограммы до ЦМР приведена на Рисунке 44.
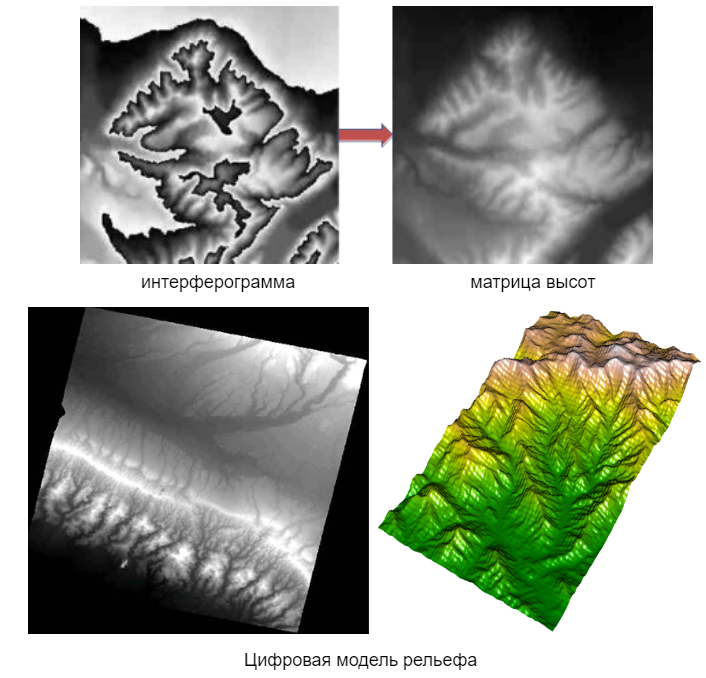
Рисунок 44. Цепочка преобразований
(интерферограмма -> матрица высот -> ЦМР)
Цифровая модель рельефа представляет собой изображение матрицы высот, трансформированное в картографическую проекцию. Матрица высот рассчитывается из матрицы абсолютных значений фазы с привлечением наземных контрольных точек.
Дифференциальная интерферометрия. Дифференциальная интерферометрия – обработка нескольких интерферометрических пар РЛИ, полученных с близких орбит в разное время, позволяет решать задачи выявления малых высотных изменений геометрии подстилающей поверхности и объектов. Дифференциальная интерферограмма формируется путем пространственного совмещения и вычитания интерферограмм разных интерферометрических пар РЛИ. Примеры результатов дифференциальной интерферометрии приведены на Рисунке 45.
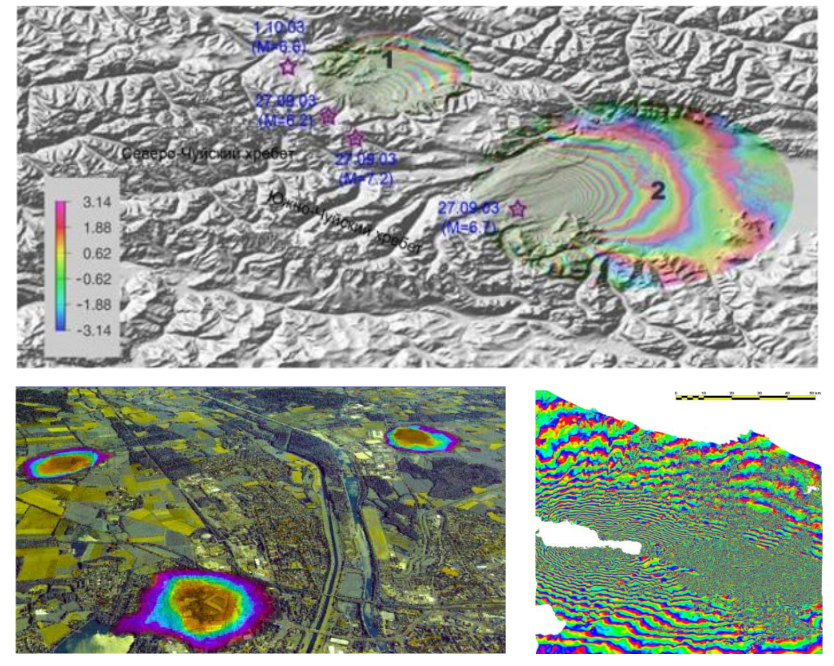
Рисунок 45. Пример результатов дифференциальной интерферометрии
Тематическая обработка
В практике использования РЛИ получили распространение следующие виды тематической обработки:
-
мониторинг районов чрезвычайных ситуаций и катастроф (наводнений, паводков, землетрясений, пожаров, техногенных катастроф), оценка и контроль их последствий;
-
обнаружение и оценка нефтяных разливов;
-
контроль за ситуацией в прибрежных зонах;
-
обнаружение, сопровождение и контроль судов;
-
обнаружение и оценка ледовых заторов;
-
мониторинг динамики, оценка и определение типов границ ледовых образований (ледовые покровы, ледники, айсберги);
-
контроль состава и состояния лесов, количественная оценка биомассы;
-
мониторинг и оценка лесных вырубок и гарей;
-
контроль за состоянием наземных трубопроводов (аварии, подвижки);
-
мониторинг и контроль объектов инфраструктуры (порты, аэродромы, дороги, электростанции и др.);
-
мониторинг изменений обстановки в зонах интереса;
-
всепогодное оперативное картографирование;
-
мониторинг развития городских территорий;
-
структурное геологическое картографирование;
-
построение высокоточных цифровых моделей местности;
-
мониторинг состояния сельскохозяйственных угодий, идентификация различных тип сельхозкультур;
-
оценка и прогнозирование урожаев;
-
определение влажности почв;
-
др.
На рисунках 46 — 49 представлены примеры РЛИ, используемые для тех или иных видов тематической обработки.
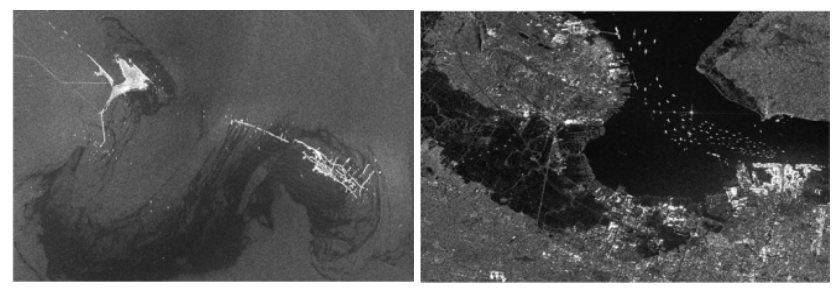
Рисунок 46. Нефтяные разливы (слева), мониторинг прибрежных зон (справа)
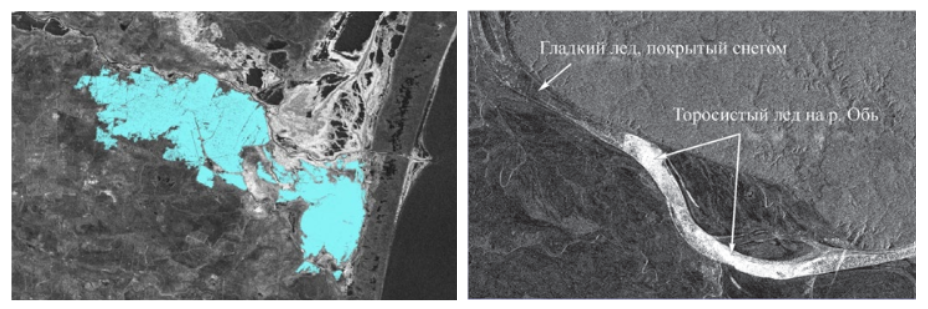
Рисунок 47. Паводки и наводнения (слева), ледовые заторы (справа)
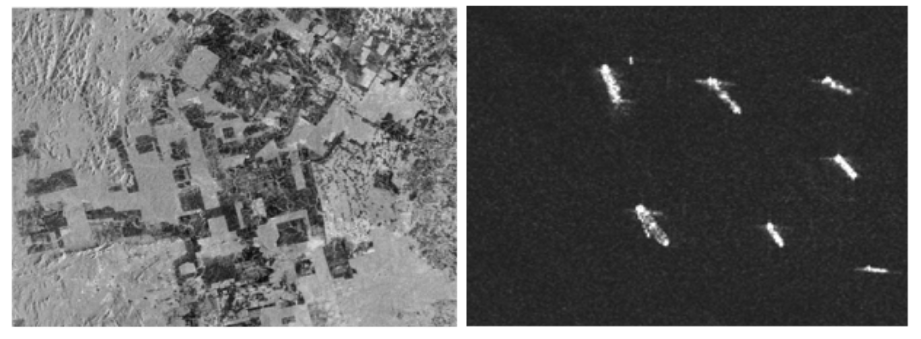
Рисунок 48. Контроль состояния лесов (слева), обнаружение и сопровождение морских судов (справа)
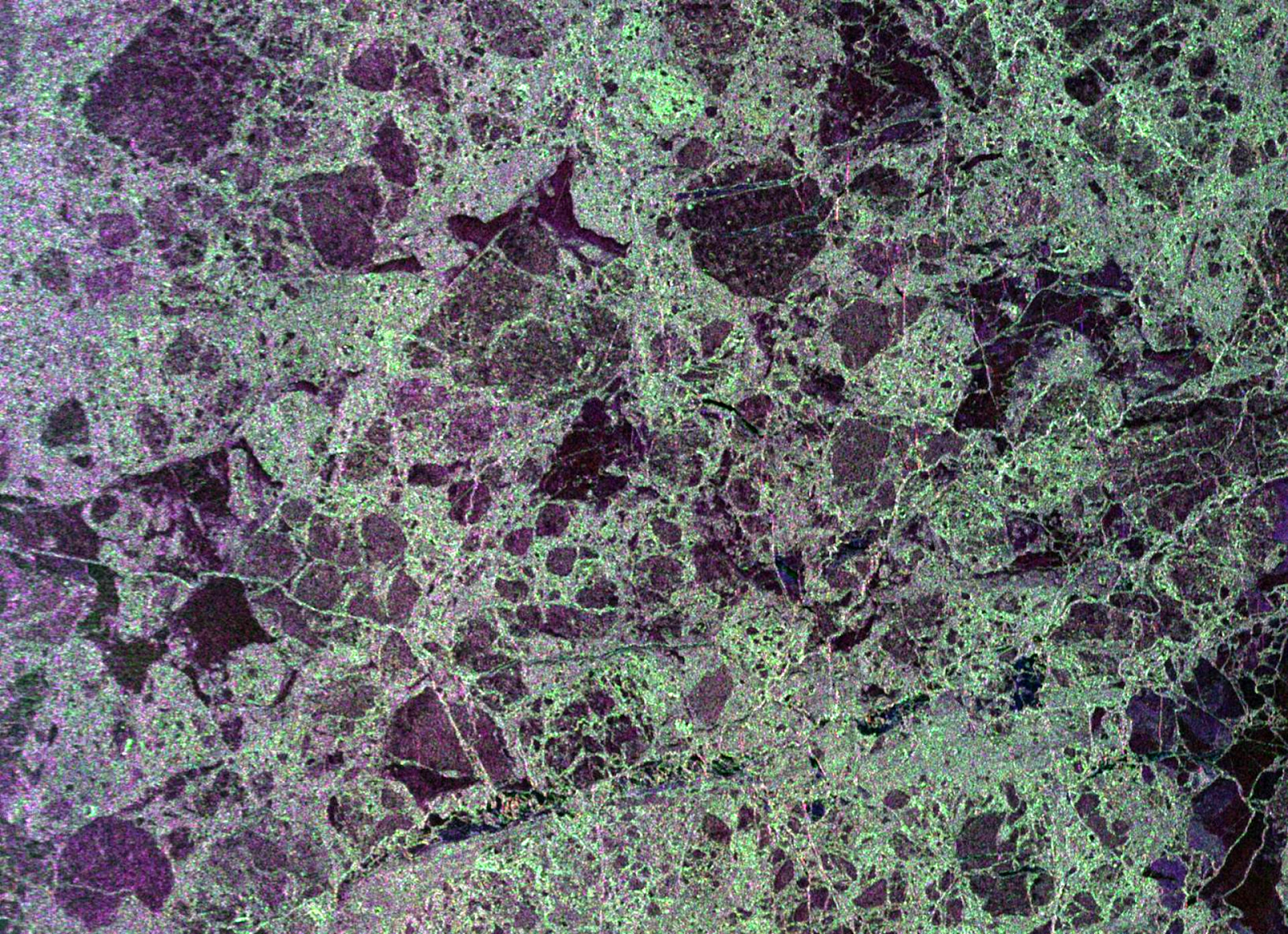
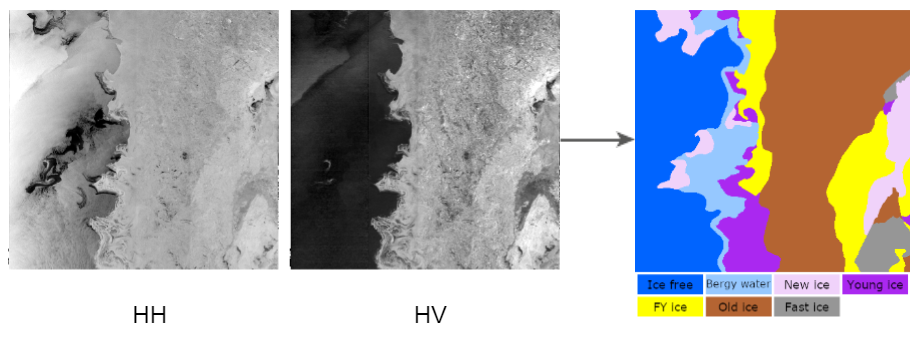
Рисунок 49. Мониторинг, оценка и определение типов ледовых образований
В заключение хотелось бы отметить, что радиолокационная съемка, наряду с оптической, является одним из основных видов ДЗЗ для целей мониторинга и оценки земной поверхности, а также процессов природного и техногенного характера. Ввиду особенностей радиолокационной съемки она имеет преимущества в решении ряда таких задач и потому стала все более широко применяться в мировой отрасли ДЗЗ.
Примечание: используемые в этой публикации иллюстрации и примеры радиолокационных снимков взяты из открытых источников.
Список сокращений
ДЗЗ — дистанционное зондирование Земли;
КА — космический аппарат;
РЛН — радиолокационное наблюдение;
РСА — радиолокатор с синтезированной апертурой;
РЛИ — радиолокационное изображение;
ДНА — диаграмма направленности антенны;
ЛЧМ — линейная частотная модуляция;
АЦП — аналого-цифровой преобразователь;
ЦМР — цифровая модель рельефа;
АФАР — активная фазированная антенная решетка.
Похожие статьи
 Астрофизика: обзор июньских препринтов 2026 года
Астрофизика: обзор июньских препринтов 2026 года Обзор небезынвестного суперстрата Cort G250 Spectrum
Обзор небезынвестного суперстрата Cort G250 Spectrum О микроводорослях, недостижимых идеалах и оплачиваемом веганами будущем
О микроводорослях, недостижимых идеалах и оплачиваемом веганами будущем Как школьное уравнение скрывает в себе гиперболический тангенс
Как школьное уравнение скрывает в себе гиперболический тангенс Июльский дайджест технических новостей, лонгридов и переводов от Хабра 2026 года
Июльский дайджест технических новостей, лонгридов и переводов от Хабра 2026 года Что почитать на выходных: «Теория каст и ролей» Алекса Крола
Что почитать на выходных: «Теория каст и ролей» Алекса Крола Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда
Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда