![[Из песочницы] EHCI по-людски на русском языке](https://pp.userapi.com/c845019/v845019964/111870/YX1s7WDCqTY.jpg "[Из песочницы] EHCI по-людски на русском языке")
Введение
Всех приветствую. Сегодня хочу поделиться опытом и всё-таки по-моему внятно объяснить про такой, на первый взгляд, простой стандарт для USB 2.0 хост-контроллера.
Изначально можно представить себе что USB 2.0 порт — это всего лишь 4 пина, по двум из которых просто передаются данные(Как, к примеру, COM-порт), но самом деле всё не так, и даже совсем наоборот. USB-контроллер в принципе не даёт нам возможности передавать данные как через обычный COM-порт. EHCI — довольно замысловатый стандарт, который позволяет обеспечить надежную и быструю передачу данных от софта до самого девайса, и в обратную сторону.
Возможно, вам пригодиться эта статья, если, к примеру, вы не имеете достаточных навыков написания драйверов и чтение документации к хардвейру. Простой пример: хотите написать свою ОС для мини-ПК, дабы какая-нибудь винда или очередной дистрибутив линукса не загружали железо, и вы использовали всю его мощь исключительно в своих целях.
Что такое EHCI
Что же, давайте начнем. EHCI — Enhanced Host Controller Interface, предназначен для передачи данных и управляющих запросов USB-устройствам, и в другую сторону, а в 99% случаев — является связующим звеном, между каким-либо софтом и физическим устройством. EHCI работает как PCI-устройство, а соответственно использует MMIO(Memory-Mapped-IO) для управления контроллером(да-да, я знаю, что некоторые PCI-девайсы используют порты, но тут я всё обобщил). В документации от Intel описан лишь принцип работы, и никаких намеков на алгоритмы, написанные хотя бы на псевдокоде, нет вовсе. EHCI имеет 2 типа MMIO-регистров: Capability и Operational. Первые служат для получения характеристик контроллера, вторые же — для его управления. Собственно, прикреплю саму суть связи софта и EHCI контроллера:

Каждый EHCI контроллер имеет несколько портов, каждому из которых могут быть подключены какие-либо USB-устройства. Так же, прошу заметить, что EHCI является улучшенной версией UHCI, который так же был разработан Intel на несколько годов раньше. Для обратной совместимости любой UHCI/OHCI контроллер, который имеет версию ниже, чем EHCI, будет компаньоном к EHCI. К примеру, у вас есть USB-клавиатура(А большинство клавиатур года так до сих пор были именно такими), которая работает на USB 1.1(заметим, что максимальная скорость работы USB 1.1 — 12 мегабит в секунду, а FullSpeed USB 2.0 имеет пропускную способность аж в 480 мбит/сек), а у Вас имеется компьютер с USB 2.0 портом, при подключении клавиатуры к компьютеру хост-контроллер EHCI как ни как будет работать с USB 1.1. Данная модель показана на следующей схеме:

Так же на будущее хочу сразу предупредить, что Ваш драйвер может работать не правильно из-за такой вот нелепой ситуации: вы инициализировали UHCI, а после чего EHCI, при этом добавили два одинаковых устройства, поставили в регистр порта бит Port Owner Control, после чего UHCI перестал работать, из-за того, что EHCI автоматически перетягивает порт на себя, а порт на UHCI перестаёт откликаться, эту ситуацию надо отслеживать.
Так же, давайте рассмотрим схему, показывающую саму архитектуру EHCI:

Справа написано про очереди — о них чуть позже.
Регистры EHCI контроллера
Для начала хочется еще раз уточнить, что через данные регистры вы будете управлять вашим устройством, поэтому они очень важны — да и без них программирование EHCI невозможно.
Для начала вам надо получить адрес MMIO, который выдан данному контроллеру, по смещению +0x10 будет лежать адрес наших долгожданных регистров. Есть одно но: сначала идут Capability регистры, а только после них — Operational, поэтому по смещению 0(от предыдущего адреса, который мы получили по смещению 0x10 относительно начала MMIO нашего EHCI) лежит один байт — длина Capability-регистров.
Capability регистры
По смещению 2 лежит регистр HCIVERSION — номер ревизии данного HC, который занимает 2 байта и содержит BCD версию ревизии (что такое BCD можно узнать из википедии).
По смещению +4 лежит регистр HCSPARAMS, его размер — 2 слова, он содержит структурные параметры устройства и его биты показывают следующее:
- Бит 16 — Port Indicators — доступные световые индикаторы для подключенных USB-устройств.
- Биты 15:12 — номер контроллера-компаньона, который присвоен данному контроллеру
- Биты 11:8 — количество портов у компаньон-контроллера
- Бит 7 — Port Routing Rules — показывает, как данные порты привязаны к компаньон-портам
- Бит 4 — Port Power Control — показывает, надо ли включать питание каждому порту, 0 — питание подаётся автоматически
- Биты 3:0 — количество портов у данного контроллера.
- По смещению +8 лежит регистр HCCPARAMS — показывает параметры совместимости, его биты значат следующее:
- Бит 2 — доступность асинхронной очереди,
- Бит 1 — доступность периодической (последовательной) очереди
- Бит 0 — 64-битная совместимость
Operation регистры
По смещению 0 лежит регистр USBCMD — командный регистр контроллера, его биты означают следующее:
- Биты 23:16 — Interrupt Threshold Control — показывает сколько микро-фреймов будет использоваться на один обычный фрейм. Чем больше, тем быстрее, но если больше 8 — то микро-фреймы будут обрабатываться с той же скоростью, что и для 8.
- Бит 6 — прерывание после каждой транзакции в асинхронной очереди,
- Бит 5 — используется ли асинхронная очередь,
- Бит 4 — использование последовательной очереди,
- Биты 3:2 — размер FrameList’a (о этом — дальше). 0 означает 1024 элемента, 1 — 512, 2 — 256, 3 — зарезервировано
- Бит 1 — устанавливается для выполнение сброса хост-контроллера.
- Бит 0 — Run/Stop
.
Далее, по смещению +4 идет регистр USBSTS — статут хост-контроллера,
- Бит 15 показывает используется ли асинхронная очередь
- Бит 14 показывает используется ли последовательная очередь,
- Бит 13 — показывает, что обнаружена пустая асинхронная очередь,
- Бит 12 установлен в 1, если при обработке транзакции произошла ошибка, тогда хост-контроллер остановит выполнение всех очередей.
- Бит 4 установлен в 1, если произошла серьезная ошибка, хост-контроллер останавливает выполнение всех очередей.
- Бит 3 FrameList (Регистр) Rollover — ставится в 1, когда хост-контроллер обработал весь frameList.
- Бит 1 — USB Error Interrupt — генерировать ли прерывание при ошибках?
- Бит 0 — USB Interrupt — выставляется после успешной обработки транзакции, если в TD был установлен IOC
Не устали? Можете налить себе крепкого чайку и принести печенок, мы еще в самом начале!
По смещению +8 лежит регистр USBINTR — регистр включения прерываний
Чтобы долго не писать, и тем более, Вам долго не читать, значения битов данного регистра можно посмотреть в спецификации, ссылка на неё будет оставлена внизу. Сюда я просто записываю 0, т.к. абсолютно не имею желания писать обработчики, мапить прерывания и т.п., так что это я считаю почти что абсолютно бессмысленным.
По смещению +12(0x0C) лежит регистр FRINDEX, в котором просто лежит текущий номер фрейма, при чем, хочу заметить, что последние 4 бита показывают номер микро-фрейма, в старшие 28 — номер фрейма (так же значение не обязательно меньше размера frameList’а, если вам нужен индекс — лучше брать его с маской 0x3FF(или же 0x1FF, и т.п.).
Регистр CTRLDSSEGMENT лежит по смещению +0x10, он показывает хост-контроллеру старшие 32 бита адреса листа фреймов.
Регистр PERIODICLISTBASE имеет смещение +0x14, в него вы можете положить младшие 32 бита листа фреймов, заметим, что адрес должен быть выравнен по размеру страницы памяти (4096).
Регистр ASYNCLISTADDR имеет смещение +0x18, в него вы можете положить адрес асинхронной очереди, заметим, что он должен быть выравнен по границе 32 байта, при этом должен находиться в первых четырех гигабайтах физической памяти.
Регистр CONFIGFLAG показывает, настроено ли устройство. Вы должны выставить бит 0 после завершения настройки устройства, он имеет смещение +0x40.
Перейдем к регистрам портов. Каждый порт имеет свой командно-статусный регистр, каждый регистр порта располагается со смещением +0x44 + (PortNumber — 1)*4, его биты значат следующее:
- Бит 12 — питание порта, 1 — питание подаётся, 0 — нет.
- Бит 8 — Port Rest — устанавливается для сброса устройства.
- Бит 3 — Port Enable/Disable Change — выставляется при изменении статуса «включенности» порта.
- Бит 2 — порт включен/не включен.
- Бит 1 — Изменение статуса подключения, ставится в 1, к примеру, если вы подключили, или отключили USB устройство.
- Бит 0 — статус подключения, 1 — подключено, 0 — нет.
Теперь перейдем к самому соку.
Структуры передачи данных и запросов
Организация структуры для обработки запросов включает в себя очередь и трансфер дескрипторы(TDs).
На данный момент мы рассмотрим только 3 структуры.
Последовательный список
Последовательный(Периодичный, Pereodic) список устроен следующим образом:

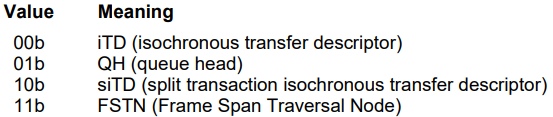
Как видно на схеме, обработка начинается с получения нужного фрейма из фрейм листа, каждый его элемент занимает 4 байта и имеет следующую структуру:

Как видно на картинке, адрес очереди/трансфер дескриптора выровнен по границе 32 байта, бит 0 означает то, что хост-контроллер не будет обрабатывать данный элемент, биты 3:1 показывают тип того, что будет обрабатывать хост-контроллер: 0 — изосинхронный TD(iTD), 1 — очередь, 2 и 3 в данной статье я рассматривать не буду.
Асинхронная очередь
Хост контроллер обрабатывает данную очередь только тогда, когда фрейм последовательный пустой, либо хост-контроллер обработал весь последовательный список.
Асинхронная очередь представляет собой указатель на очередь, где содержатся другие очереди, которые нуждаются в обработке. Схема:

qTD(Queue Element Transfer Descriptor)
Данный TD имеет следующую структуру:

Next qTD Pointer — указатель на продолжение очереди для обработки(для Horizontal Execution), бит 0 Next qTD Pointer’а показывает, то, что дальше нет еще одной очереди.
qTD Token — токен TD, показывает параметры передачи данных:
- Бит 31 — Data Toggle (об этом дальше)
- Биты 30:16 — количество данных для передачи, после завершения транзакции их значение уменьшается на количество переданных данных.
- Бит 15 — IOC — Interrupt On Complete — вызвать прерывание после завершения обработки дескриптора.
- Биты 14:12 показывают номер текущего буфера, в который/из которого производиться обмен данными, об этом далее.
- Биты 11:10 — допустимое количество ошибок. Данная таблица показывает, когда счетчик количества ошибок уменьшается:

Сноска 1 — обнаружение Babble либо Stall автоматически останавливает выполнение головы очереди. Сноска 3 — Ошибки буфера данных — это проблемы с хостом. Они не учитывают повторные попытки устройства.
- 9:8 — PID Code — тип токена: 0 — токен на вход(от хоста к устройству), 1 — токен на выход(от устройства к хосту), 2 — «SETUP» токен
- Биты 7:0 показывают статус TD:
Бит 7 показывает, что данный TD имеет активное состояние(т.е. хост-контроллер обрабатывает данный TD)
Бит 6 — Halted — показывает, что произошла какая-либо ошибка и выполнение TD остановлено.
Бит 4 — Babble Detected — количество данных, которые мы отправили устройству, или на оборот, меньше, чем мы передаём, т.е., к примеру, нам устройство отправило 100 байт данных, а мы читаем только 50 байт, а потом еще 50. Бит Halted так же будет установлен, если данный бит установлен в 1.
Бит 3 — Transaction Error — произошла ошибка во время проведения транзакции.
qTD Buffer Page Pointer List — любой из 5 буферов. Содержит ссылку на то, куда в памяти производить транзакцию(отправить данные устройству/принять данные с устройства), все адреса в буферах, кроме первого, должны быть выровнены по размеру страницы (4096 байт).
Голова очереди
Голова очереди(Queue Head) имеет следующую структуру:
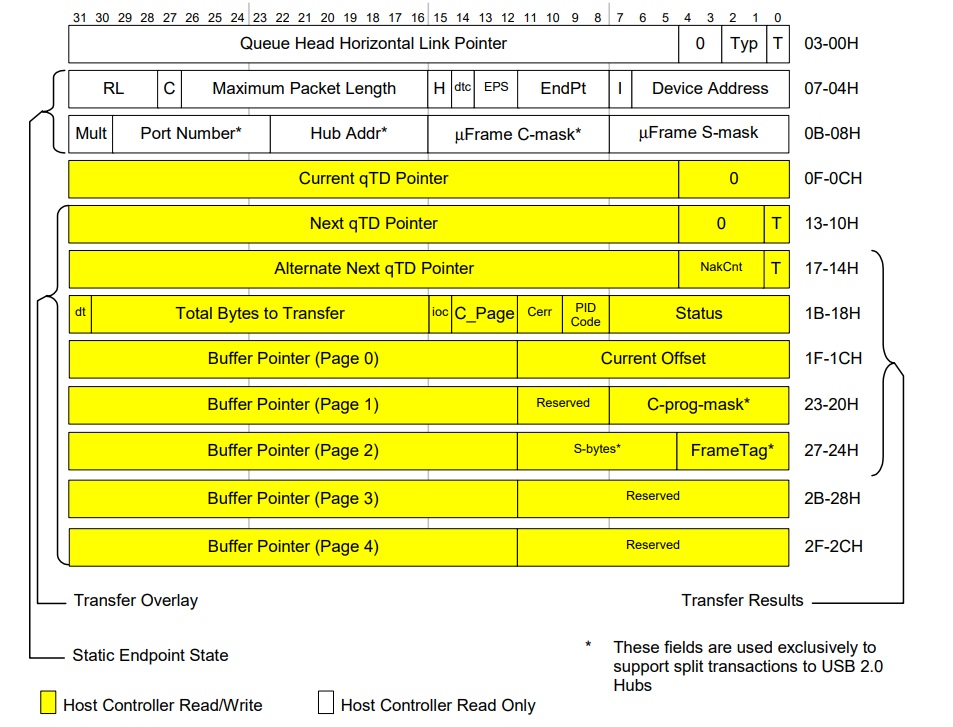
Queue Head Horizontal Link Pointer — указатель на следующую очередь, биты 2:1 имеют следующие значения в зависимости от типа очереди:
Endpoint Capabilities/Characteristics — характеристики очереди:
- Биты 26:16 содержат максимальный размер пакета для передачи
- Бит 14: Data Toggle Control — показывает, где хост-контроллер должен брать изначальное значение Data Toggle, 0 — игнорирует бит DT в qTD, сохраняет бит DT для головы очереди.
- Бит 13:12 — характеристики скорости передачи:

- Биты 11:8 — номер конечной точки, к которой выполняется запрос
- Биты 6:0 — адрес устройства
Endpoint Capabilities: Queue Head DWord 2 — продолжение предыдущего двойного слова:
- Биты 29:23 — номер Хаба
- Биты 22:16 — адрес Хаба
Current qTD Link Pointer — указатель на текущий qTD.
Переходим к самому интересному.
Драйвер EHCI
Начнем с того, какие запросы может выполнять EHCI. Есть 2 типа запросов: Control — а-ля команд, и Bulk — к конечным точкам, для обмена данными, к примеру, абсолютное большинство флешек(USB MassStorage) использует тип передачи данных Bulk/Bulk/Bulk. Мышь и клавиатура для передачи данных тоже используют Bulk — запросы.
Инициализируем EHCI и настраиваем асинхронную и последовательные очереди:
// Base I/O Address PciBar bar; PciGetBar(&bar, id, 0); EhciController *hc = VMAlloc(sizeof(EhciController)); hc->capRegs = (EhciCapRegs *)(uintptr_t)bar.u.address; hc->opRegs = (EhciOpRegs *)(uintptr_t)(bar.u.address + hc->capRegs->capLength); // Read the Command register // Читаем командный регистр uint cmd = ROR(usbCmdO); // Write it back, setting bit 2 (the Reset bit) // Записываем его обратно, выставляя бит 2(Reset) // and making sure the two schedule Enable bits are clear. // и проверяем, что 2 очереди выключены WOR(usbCmdO, 2 | cmd & ~(CMD_ASE | CMD_PSE)); // A small delay here would be good. You don't want to read // Небольшая задержка здесь будет неплоха, Вы не должны читать // the register before it has a chance to actually set the bit // регистр перед тем, как у него не появится шанса выставить бит ROR(usbCmdO); // Now wait for the controller to clear the reset bit. // Ждем пока контроллер сбросит бит Reset while (ROR(usbCmdO) & 2); // Again, a small delay here would be good to allow the // reset to actually become complete. // Опять задержка ROR(usbCmdO); // wait for the halted bit to become set // Ждем пока бит Halted не будет выставлен while (!(ROR(usbStsO) & STS_HCHALTED)); // Выделяем и выравниваем фрейм лист, пул для очередей и пул для дескрипторов // Замечу, что все мои дескрипторы и элементы очереди выравнены на границу 128 байт hc->frameList = (u32 *)VMAlloc(1024 * sizeof(u32) + 8192 * 4); hc->frameList = (((uint)hc->frameList) / 16384) * 16384 + 16384; hc->qhPool = (EhciQH *)VMAlloc(sizeof(EhciQH) * MAX_QH + 8192 * 4); hc->tdPool = (EhciTD *)VMAlloc(sizeof(EhciTD) * MAX_TD + 8192 * 4); hc->qhPool = (((uint)hc->qhPool) / 16384) * 16384 + 16384; hc->tdPool = (((uint)hc->tdPool) / 16384) * 16384 + 16384; // Asynchronous queue setup // Инициализируем асинхронную очередь EhciQH *qh = EhciAllocQH(hc); // Это указатель на нашу очередь, она у нас будет одна // указываем, что это очередь qh->qhlp = (u32)(uintptr_t)qh | PTR_QH; // устанавливаем бит, который показывает, что это Голова очереди qh->ch = QH_CH_H; qh->caps = 0; qh->curLink = 0; qh->nextLink = PTR_TERMINATE; qh->altLink = 0; qh->token = 0; // Заполняем буферы нулями for (uint i = 0; i < 5; ++i) { qh->buffer[i] = 0; qh->extBuffer[i] = 0; } hc->asyncQH = qh; // Periodic list queue setup // Инициализируем последовательную очередь qh = EhciAllocQH(hc); // Мы ничего не делаем qh->qhlp = PTR_TERMINATE; qh->ch = 0; qh->caps = 0; qh->curLink = 0; qh->nextLink = PTR_TERMINATE; qh->altLink = 0; qh->token = 0; // Заполняем буферы for (uint i = 0; i < 5; ++i) { qh->buffer[i] = 0; qh->extBuffer[i] = 0; } qh->transfer = 0; qh->qhLink.prev = &qh->qhLink; qh->qhLink.next = &qh->qhLink; hc->periodicQH = qh; // Заполняем фреймлист ссылками на нашу последовательную очередь for (uint i = 0; i < 1024; ++i) hc->frameList[i] = PTR_QH | (u32)(uintptr_t)qh; kprintf("FrameList filled. Turning off Legacy BIOS support..."); // Check extended capabilities // Отключаем BIOS Legacy support uint eecp = (RCR(hccParamsO) & HCCPARAMS_EECP_MASK) >> HCCPARAMS_EECP_SHIFT; if (eecp >= 0x40) { // Disable BIOS legacy support uint legsup = PciRead32(id, eecp + USBLEGSUP); kprintf("."); if (legsup & USBLEGSUP_HC_BIOS) { PciWrite32(id, eecp + USBLEGSUP, legsup | USBLEGSUP_HC_OS); kprintf("."); for (;;) { legsup = PciRead32(id, eecp + USBLEGSUP); kprintf("."); if (~legsup & USBLEGSUP_HC_BIOS && legsup & USBLEGSUP_HC_OS) { break; } } } } kprintf("Donen"); // Disable interrupts // Отключаем прерывания //hc->opRegs->usbIntr = 0; MWIR(ehcibase, usbIntrO, 0); // Setup frame list // Устанавливаем ссылку на фреймлист //hc->opRegs->frameIndex = 0; WOR(frameIndexO, 0); //hc->opRegs->periodicListBase = (u32)(uintptr_t)hc->frameList; WOR(periodicListBaseO, (u32)(uintptr_t)hc->frameList); // копируем адрес асинхронной очереди в регистр //hc->opRegs->asyncListAddr = (u32)(uintptr_t)hc->asyncQH; WOR(asyncListAddrO, (u32)(uintptr_t)hc->asyncQH); // Устанавливаем сегмент в 0 //hc->opRegs->ctrlDsSegment = 0; WOR(ctrlDsSegmentO, 0); // Clear status // Чистим статус //hc->opRegs->usbSts = ~0; WOR(usbStsO, ~0); // Enable controller // Запускаем контроллер, 8 микро-фреймов, включаем // последовательную и асинхронную очередь //hc->opRegs->usbCmd = (8 << CMD_ITC_SHIFT) | CMD_PSE | CMD_ASE | CMD_RS; WOR(usbCmdO, (8 << CMD_ITC_SHIFT) | CMD_PSE | CMD_ASE | CMD_RS); while (ROR(usbStsO)&STS_HCHALTED); // Configure all devices to be managed by the EHCI // Говорим, что завершили //hc->opRegs->configFlag = 1; WOR(configFlagO, 1); // Probe devices // Пробуем порты EhciProbe(hc); Собственно, код для сброса порта в изначальное состояние:
volatile u32 *reg = &hc->opRegs->ports[port]; // Включаем питание на порту, ждём 100мс *reg|=(1<<12)|(1<<20); Wait(100); // Сбрасываем порт, ждем 50 мс EhciPortSet(reg, PORT_RESET | (1<<12) | (1<<20) | (1<<6)); Wait(50); EhciPortClr(reg, PORT_RESET); // Wait 100ms for port to enable (TODO - what is appropriate length of time?) // Ждем 100 мс чтобы порт включился, в документации написано, // что 100 мс должно хватить uint status = 0; for (uint i = 0; i < 10; ++i) { // Delay Wait(10); // Get current status // Получаем текущий статус status = *reg; // Check if device is attached to port // Проверяем подключение устройства к контроллеру if (~status & PORT_CONNECTION) break; // Acknowledge change in status // Если статус поменялся - чистим биты порта if (status & (PORT_ENABLE_CHANGE | PORT_CONNECTION_CHANGE)) { EhciPortClr(reg, PORT_ENABLE_CHANGE | PORT_CONNECTION_CHANGE); continue; } // Check if device is enabled // Проверяем устройство на то, что оно запустилось if (status & PORT_ENABLE) break; } return status; Control-запрос к устройству:
static void EhciDevControl(UsbDevice *dev, UsbTransfer *t) { EhciController *hc = (EhciController *)dev->hc; UsbDevReq *req = t->req; // Determine transfer properties // Обозначаем свойства транзакции uint speed = dev->speed; uint addr = dev->addr; uint maxSize = dev->maxPacketSize; uint type = req->type; uint len = req->len; // Create queue of transfer descriptors // Создаём очередь TDs EhciTD *td = EhciAllocTD(hc); if (!td) return; EhciTD *head = td; EhciTD *prev = 0; // Setup packet // Инициализирующий пакет uint toggle = 0; uint packetType = USB_PACKET_SETUP; uint packetSize = sizeof(UsbDevReq); EhciInitTD(td, prev, toggle, packetType, packetSize, req); prev = td; // Data in/out packets packetType = type & RT_DEV_TO_HOST ? USB_PACKET_IN : USB_PACKET_OUT; u8 *it = (u8 *)t->data; u8 *end = it + len; //EhciPrintTD(td); while (it < end) { td = EhciAllocTD(hc); if (!td) return; toggle ^= 1; packetSize = end - it; if (packetSize > maxSize) packetSize = maxSize; EhciInitTD(td, prev, toggle, packetType, packetSize, it); it += packetSize; prev = td; } // Status packet // Получаем статус td = EhciAllocTD(hc); if (!td) return; toggle = 1; packetType = type & RT_DEV_TO_HOST ? USB_PACKET_OUT : USB_PACKET_IN; EhciInitTD(td, prev, toggle, packetType, 0, 0); // Initialize queue head // Инициализируем голову очереди: EhciQH *qh = EhciAllocQH(hc); EhciInitQH(qh, t, head, dev->parent, false, speed, addr, 0, maxSize); // Wait until queue has been processed // Ждем пока очередь не будет обработана EhciInsertAsyncQH(hc->asyncQH, qh); EhciWaitForQH(hc, qh); } Код обработки очереди:
if (qh->token & TD_TOK_HALTED) { t->success = false; t->complete = true; } else if (qh->nextLink & PTR_TERMINATE) if (~qh->token & TD_TOK_ACTIVE) { if (qh->token & TD_TOK_DATABUFFER) kprintf(" Data Buffer Errorn"); if (qh->token & TD_TOK_BABBLE) kprintf(" Babble Detectedn"); if (qh->token & TD_TOK_XACT) kprintf(" Transaction Errorn"); if (qh->token & TD_TOK_MMF) kprintf(" Missed Micro-Framen"); t->success = true; t->complete = true; } if (t->complete) .... И теперь запрос к конечной точке(Bulk-запрос)
static void EhciDevIntr(UsbDevice *dev, UsbTransfer *t) { EhciController *hc = (EhciController *)dev->hc; // Determine transfer properties // Обговариваем характеристики транзакции uint speed = dev->speed; uint addr = dev->addr; uint maxSize = t->endp->desc->maxPacketSize; uint endp = t->endp->desc->addr & 0xf; EhciTD *td = EhciAllocTD(hc); if (!td) { t->success = false; t->complete = true; return; } EhciTD *head = td; EhciTD *prev = 0; // Data in/out packets uint toggle = t->endp->toggle; uint packetType = t->endp->desc->addr & 0x80 ? USB_PACKET_IN : USB_PACKET_OUT; uint packetSize = t->len; EhciInitTD(td, prev, toggle, packetType, packetSize, t->data); // Initialize queue head // Инициализируем голову очереди EhciQH *qh = EhciAllocQH(hc); EhciInitQH(qh, t, head, dev->parent, true, speed, addr, endp, maxSize); //printQh(qh); // Schedule queue // Добавляем в очередь EhciInsertPeriodicQH(hc->periodicQH, qh); } Думаю, что тема достаточно интересная, в интернете на русском документаций, описаний и статей на эту тему почти нет, а если есть — очень размыто. Если интересна тема работы с железом и разработки ОС, то есть много чего рассказать.
Доки: Спецификация
Источник


