
Для достижения господства в небе птицы прошли очень долгий эволюционный путь. Структура их тела, мышцы, кости и оперение — все это играет важную роль в полете. Человечество, желающее покорить небеса и вдохновляясь птицами, начало создавать различные аппараты, которые в той или иной степени имитировали определенные физиологические особенности пернатых летунов. Крылья, хвост, даже нос современного самолета созданы с оглядкой на физические законы и на птиц, которые эти законы используют в свою пользу. Однако между, скажем, вороном и самолетом есть много структурных отличий. Во-первых, у самолета нет оперения, а во-вторых, самолеты крыльями не машут, что не может не радовать. Тем не менее ученые из Лундского университета (Швеция) решили уделить внимание именно подвижности крыльев, чтобы установить, как то или иное положение крыла влияет на эффективность полета. Что удалось выяснить ученым, и как это может повлиять на робототехнику? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Небо уже давно перестало быть чуждым человеку, но назвать наш вид господствующим в небесах сложно. Самолеты, вертолеты, дроны, летающие роботы разной конструкции уже не удивляют, но их функционал и эффективность не могут сравниться с настоящими владыками небес — птицами. Изучение птиц и их умения летать длится уже не одно столетие, но сложная кинематика и аэродинамика их полета все ставит много вопросов.
В последние годы аэродинамика полета птиц изучалась с использованием передовых методов, таких как высокоскоростная трехмерная кинематика и велоциметрия изображений частиц (PIV от particle image velocimetry), что позволило улучшить наши знания о естественном полете. Однако обучение птиц работе в лабораторных условиях требует много времени. Кроме того, птиц нельзя заставить двигать крыльями за пределами их естественного движения. Это ограничение делает невозможным систематические исследования альтернативной кинематики крыла, таких как различные взмахи, скручивание и складывание, влияющие на аэродинамические характеристики. Тем не менее необходимо выйти за рамки естественных движений, чтобы понять, почему птицы двигают крыльями так, как они это делают, и лучше понять влияние различных кинематических параметров на эффективность полета. Альтернативным методом изучения этих вопросов может быть теоретическое исследование, но и оно дает крайне ограниченные данные.
В рамках робототехники на данный момент существует очень малое число роботов, которых используют для изучения связи между кинематикой и аэродинамическими характеристиками при машущем полете. Основное внимание уделялось небольшим насекомоподобным системам с плоскими нескладывающимися крыльями и высокой частотой взмахов, а также летучим мышам-роботам с гибкими мембранными крыльями. Те немногие роботы, используемые для изучения машущего полета птиц, обладают весьма упрощенной геометрией крыльев и/или уменьшенными кинематическими возможностями по сравнению с птицами. Крылья «роботов-птиц» либо похожи на крылья летучих мышей (мембранная структура), либо лишены возможности складываться. Другими словами, крылья роботов не могут сравниться с крыльями птиц в подвижности, которая играет важную роль во время полета в тех или иных условиях.
Изображение №1
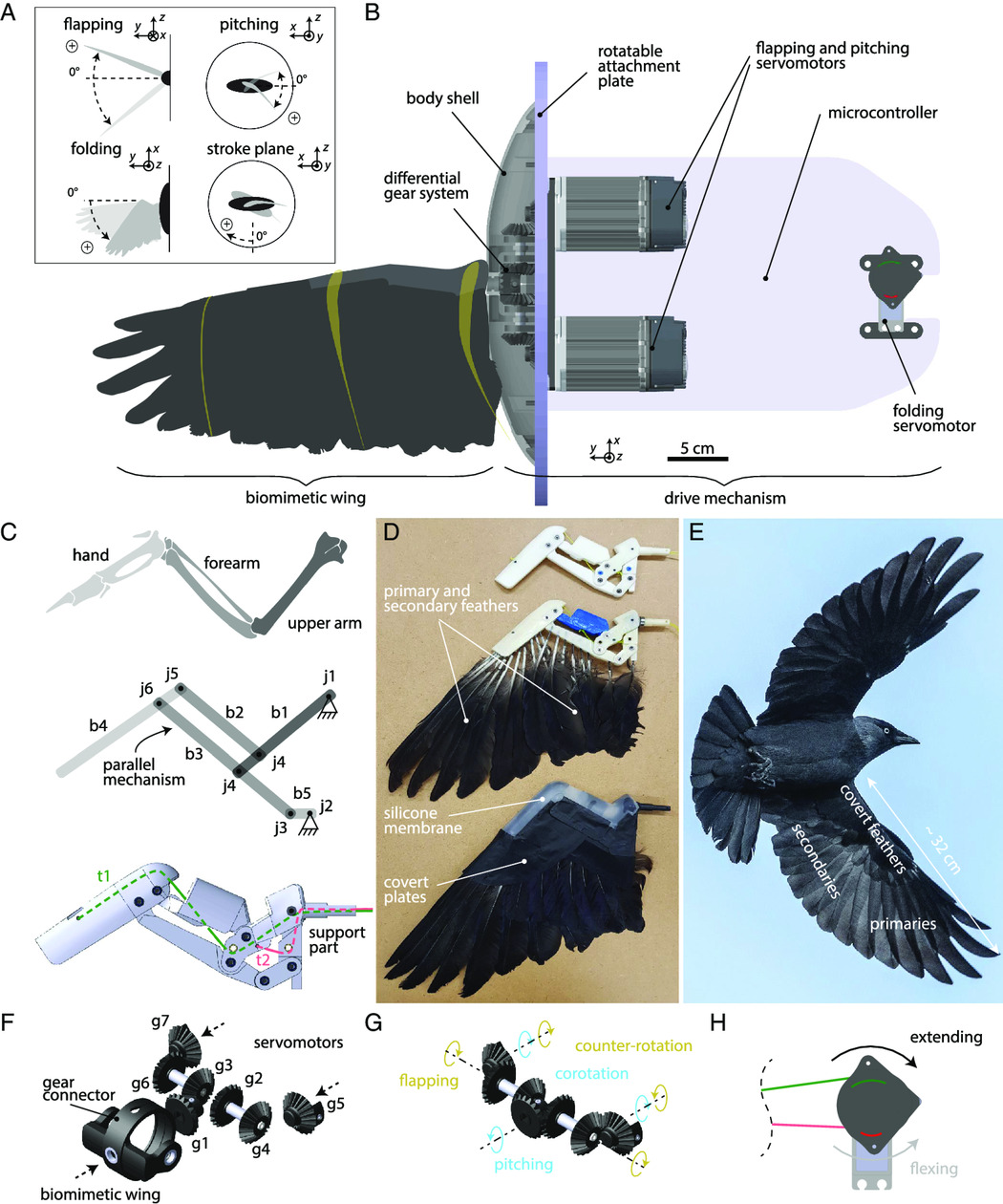
В рассматриваемом нами сегодня труде ученые решили охарактеризовать биогибридное роботизированное машущее крыло, способное к независимым и одновременным взмахам, тангажу и складыванию, а также к взмахам под разными углами (1A). Это устройство позволило ученым управлять основными кинематическими параметрами, которые птицы используют для адаптации аэродинамических сил.
Данная система оснащена натуральными перьями и обеспечивает значительно более высокую кинематическую сложность и аэродинамический контроль, чем предыдущие роботы, вдохновленные птицами, независимо от того, летают они свободно или устанавливаются в аэродинамических трубах.
Результаты исследования
Изучаемый робот состоит из сменного биогибридного крыла (1C и 1D), созданного по образцу галки (Corvus monedula, 1E), и приводного механизма для управления движением (1B). Внутреннее крыло состоит из параллельного механизма из пяти искусственных костей (b1–b5 на 1C), который может складываться в одной плоскости. Аэродинамическая поверхность состоит из 19 маховых перьев галки (первичных и вторичных; 1D) и искусственных пластин, которые имитируют кроющие перья и заключают в себе параллельный механизм, используемый для складывания крыльев. Перья крепко приклеены к костям b4 и b3, а кроющие пластины к костям b4, b2 и b1. Подобно своему птичьему аналогу, раскрытое крыло имеет длину 0.33 м и соотношение сторон 5.1 (1E, таблица №1).
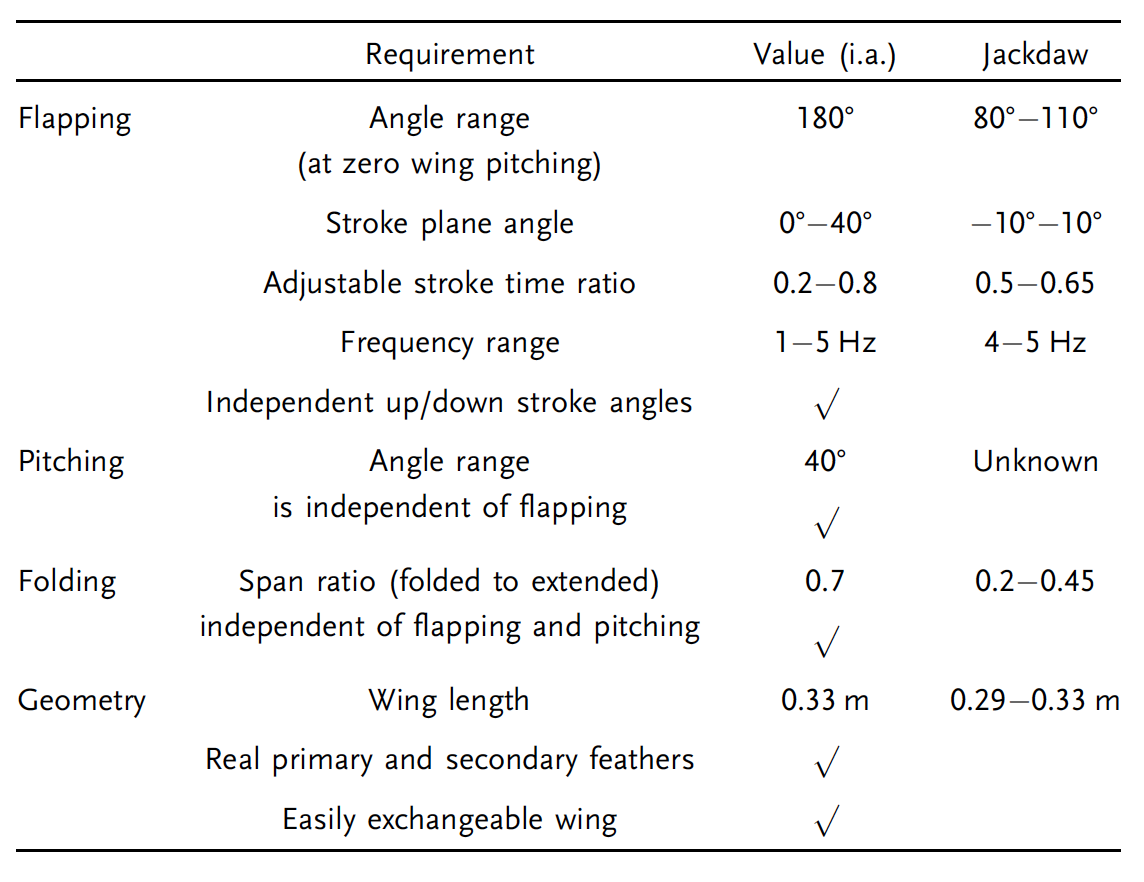
Таблица №1
Приводной механизм состоит из дифференциальной зубчатой передачи (1F), приводимой в действие двумя встроенными серводвигателями для взмахов и тангажа крыльев (1G), и отдельного цифрового серводвигателя для складывания крыльев (1H). Этот приводной механизм обеспечивает любую комбинацию взмахов, тангажа и складывания крыльев в пределах технических характеристик робота (таблица №1).
Робот был прикреплен к стене аэродинамической трубы с помощью вращающейся крепежной пластины (1B), которую можно использовать для изменения угла плоскости хода робота (0–40°; 1A).
Изображение №2
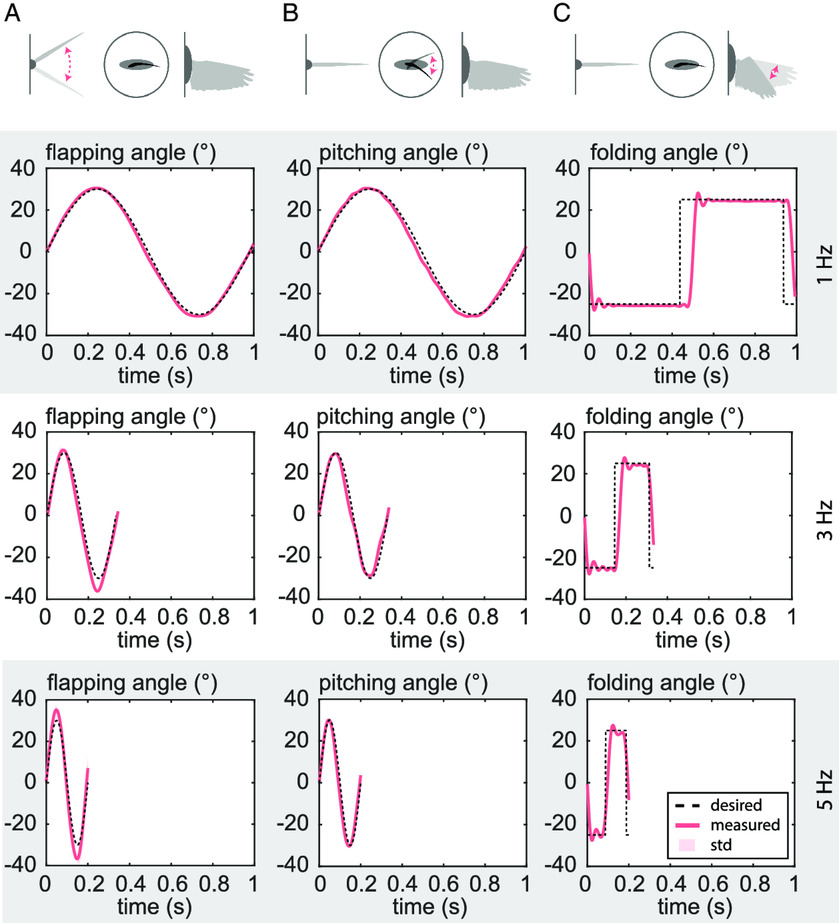
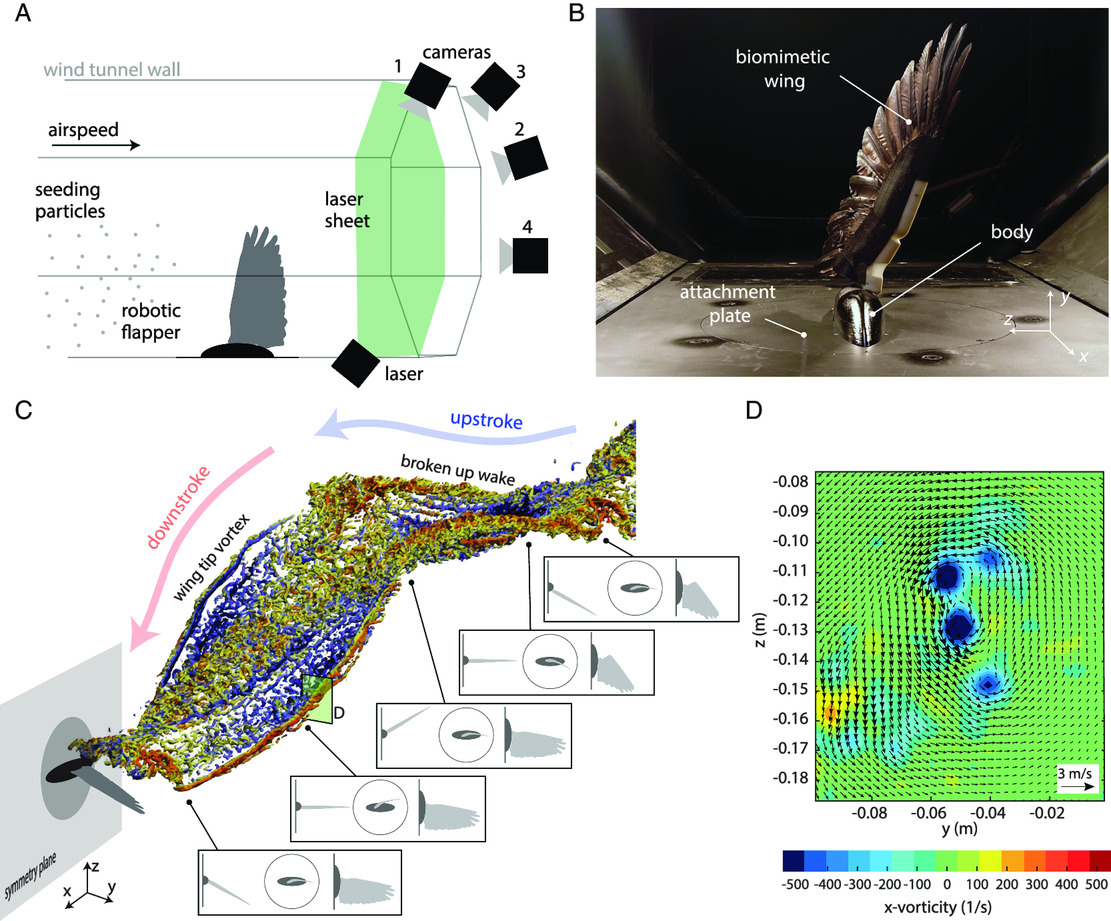
Ученые оценили угловую точность крыла, сравнив желаемое и фактическое движение, используя оптическую систему захвата движения. Было проведено эксперимент с взмахами, тангажом или складыванием (вверху на 2A–2C), установив остальные параметры на 0°. Применялись частоты циклов 1, 3 и 5 Гц и скорость ветра 0 и 8 м/с. Была проведена оценка восьми полных циклов (n = 8) для каждого эксперимента. Ниже представлены результаты для опытов при 0 м/с.
Угол взмаха робота по отношению ко времени (2A) показал отличное совпадение с желаемой траекторией на частоте 1 Гц. Однако имеет место нарастающее перерегулирование (выход за пределы заданного значения в поворотных точках циклического движения) с увеличением частоты взмахов до 9 % при частоте 5 Гц.
При отслеживании угла тангажа наблюдается хорошее соответствие между желаемым и фактическим углом по времени на всех частотах (2B). Однако при складывании крыла наблюдалось начальное превышение относительно желаемых углов до достижения желаемого угла складывания (2C).
Результаты всех вышеупомянутых экспериментов были практически идентичным тем, что были получены в ходе опытов при скорости ветра в 8 м/с. Все эксперименты показывают небольшое (<2%) стандартное отклонение по отношению к максимальной амплитуде между циклами (n = 8), что указывает на хорошую повторяемость движений крыла.
Изображение №3
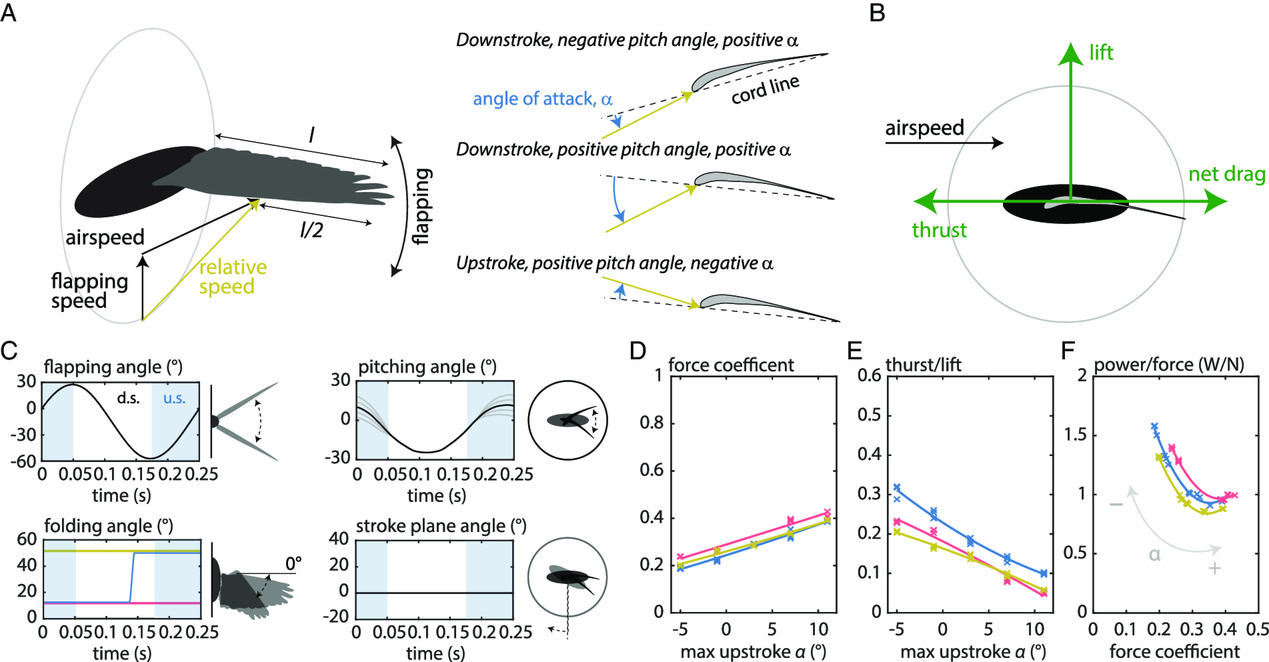
В нормальном машущем полете птицы складывают крылья во время маха вверх и расправляют их во время маха вниз, адаптируя угол наклона крыла (и, следовательно, угол атаки*; 4A) для управления аэродинамическими силами.
Угол атаки* — угол между направлением вектора скорости набегающего на тело потока (жидкости или газа) и характерным продольным направлением.
Чтобы сравнить аэродинамические характеристики взмаха при складывании крыла (силы и удельная мощность, определенные с помощью стерео PIV; изображение №3), было проверено три разные сценария складывания:
- крыло сложено на протяжении всего взмаха;
- крыло выпрямлено на протяжении всего взмаха;
- крыло складывается при движении вверх и выпрямляется при движении вниз (далее «нормальная» конфигурация) (4C).
Все сценарии тестировались при различных углах атаки: -5°, -1°, 3°, 7° и 11°.
Взмахи крылом осуществлялись синусоидальным движением (минимальная амплитуда: 57.5°; максимальная амплитуда: 27.5°; 5C), угол взмаха 0° (4C), частота взмахов 4 Гц, а скорость потока в аэродинамической трубе была 8 м/с.
Изображение №4
При сравнении трех сценариев складывания было обнаружено, что постоянно расправленное крыло приводит к наибольшему коэффициенту полезной силы (векторная сумма подъемной силы и тяги, 4B; красные маркеры и линия на 4D) по сравнению с нормальным положением крыла (синие маркеры и линия на 4D) и постоянно сложенным крылом (желтые маркеры и линия на 4D).
Отношение тяги к подъемной силе было самым высоким для нормальной конфигурации (синие маркеры и линия на 4E) по сравнению с обоими другими сценариями. Это указывает на то, что она создает наиболее направленную вперед силу из трех сценариев складывания.
Удельная сила (мощность, необходимая для создания заданного количества полезной силы) была самая низкая для сложенного крыла и самая высокая для выпрямленного крыла (красные маркеры и линия на 4F).
Видео одного из экспериментов.
Эти результаты показывают, что птицы, складывающие крылья во время взмаха вверх, не только генерируют большую тягу, но также имеют более эффективную генерацию силы по сравнению с теми, у кого крыло расправлено во время взмаха.
Сравнение различных углов при движении вверх показало, что независимо от сценария складывания увеличение угла приводит к увеличению коэффициента полезной силы и относительному уменьшению тяги (4D и 4E). Удельная мощность имела u-образную форму относительно коэффициента полезной силы с минимумом, близким к углу атаки в 7° (4F). Это говорит о том, что именно такой угол (небольшой, но не отрицательный) позволяет птицам достичь наибольшей эффективности полета.
Изображение №5
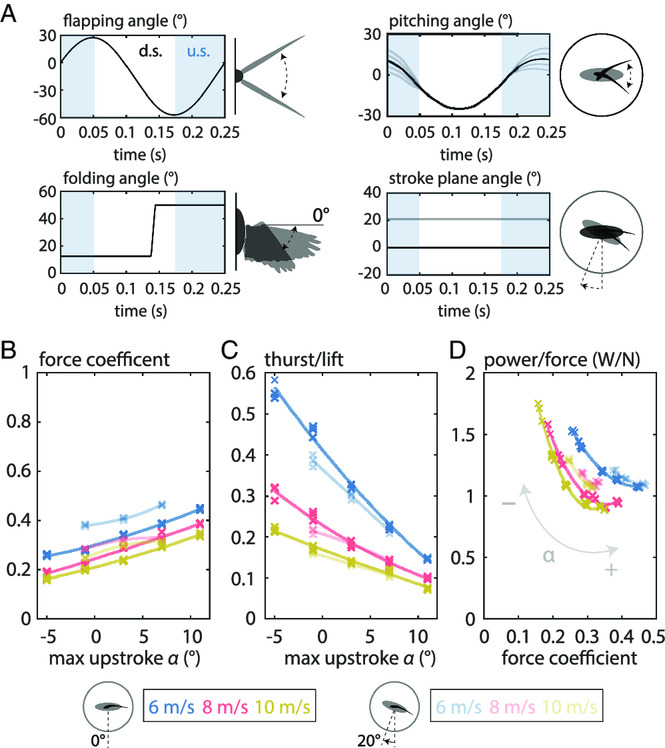
Угол плоскости взмаха варьируется в зависимости от скорости полета у птиц, что может повлиять на величину полезной силы, ее направление и затраты на ее генерацию. Чтобы проверить, как угол плоскости взмаха влияет на аэродинамические силы и мощность, ученые провели второй эксперимент, в котором определили силы и мощность при использовании нормальной конфигурации складывания, изменяя скорость полета (от 6 до 10 м/с с шагом в 1 м/с) и угол плоскости взмаха (0° и 20°).
Увеличение угла плоскости взмаха увеличивало коэффициент полезной силы (5B) и снижало отношение тяги к подъемной силе (5C) по сравнению с вертикальной плоскостью взмаха. Таким образом, наклон плоскости приводит к относительно большей силе, но уменьшает относительное количество создаваемой тяги. Удельная мощность как функция коэффициента силы была несколько выше, когда угол наклона плоскости увеличивался, чем при вертикальном наклоне (5D). Это указывает на снижение аэродинамической эффективности при увеличении угла плоскости взмаха.
Наклон плоскости взмаха (светлые маркеры и линии на 5D) и использование отрицательного угла атаки при движении вверх приводило к снижению удельной силы на низких, но не на высоких скоростях (синие маркеры и линии на 5D; желтые маркеры и линии на 5D). С другой стороны, наклон плоскости взмаха и использование положительного угла атаки вверх увеличивало удельную силу, при этом увеличение было более заметно на высоких скоростях, чем на низких.
Изображение №6
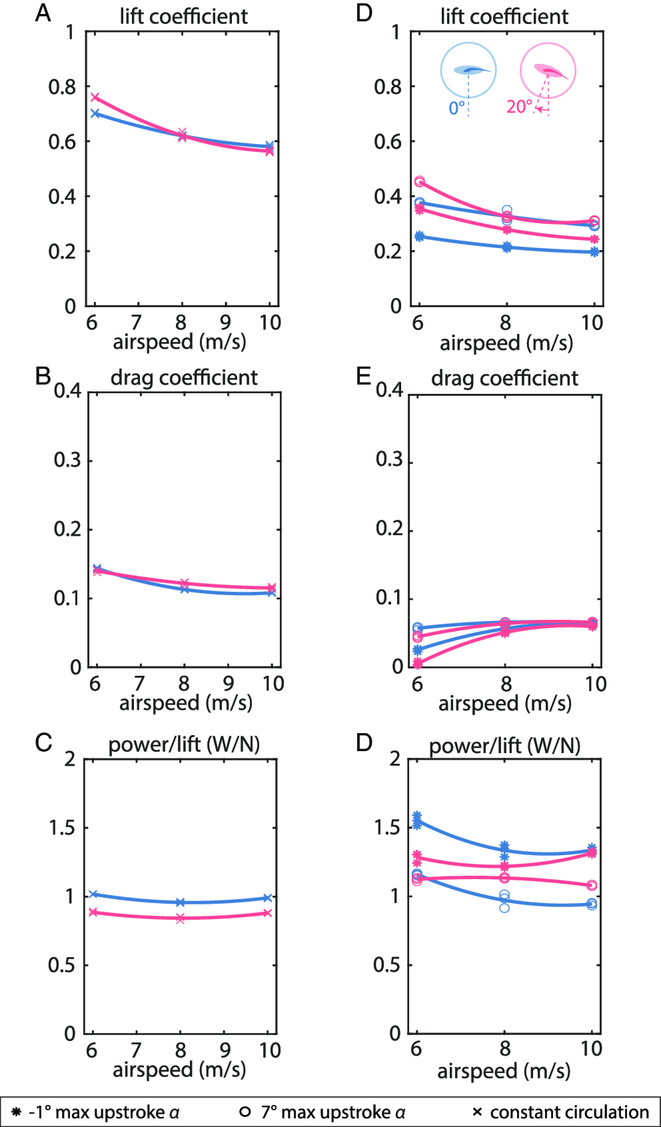
Ученые отмечают, что циркуляция в аэродинамике описывает воспринимаемое вращение воздуха, движущегося вокруг крыла, создающего подъемную силу.
Чтобы добиться постоянной циркуляции на протяжении всего цикла взмахов, ученые меняли угол атаки крыла (т.е. угол тангажа; 4B), чтобы он соответствовал изменениям скорости воздуха над крылом во время взмахов и средним длинам хорд при движении вверх и вниз, предполагая, что циркуляция пропорциональна всем трем факторам.
Преимущество постоянной циркуляции, по сравнению с ранее протестированной стратегией, заключается в более однородном потоке вниз по всему взмаху крыла, что приводит к относительно низкой индуцированной мощности (затраты на создание подъемной силы).
Было обнаружено уменьшение коэффициента подъемной силы и коэффициента лобового сопротивления с увеличением скорости воздушного потока при применении постоянной циркуляции (6A и 6B). На низких скоростях наклон плоскости хода увеличивает подъемную силу и немного уменьшает сопротивление, а на высоких скоростях уменьшал подъемную силу и увеличивал сопротивление. Естественно, птицы могут применять наклонную плоскость на низких скоростях (когда создание подъемной силы затруднено) для создания большей подъемной силы, а на высоких скоростях — горизонтальную плоскость для уменьшения сопротивления (и увеличения тяги).
Удельная подъемная сила соответствовала U-образной схеме на испытанных скоростях, при этом кривая для наклонной плоскости всегда была ниже, чем для вертикальной. Эти результаты показывают, что птицы генерируют силы менее эффективно при более высоких скоростях полета при вертикальных плоскостях взмаха для удовлетворения более высоких требований к тяге, чем при низких скоростях при полете с наклонным углом плоскости взмаха для удовлетворения более высоких требований подъемной силы.
Сравнивая измерение постоянной циркуляции с предыдущим экспериментом (изображение №4), ученые увидели, что постоянная циркуляция (6A и 6B) существенно увеличивает коэффициенты подъемной силы и сопротивления (6D и 6E). Более того, удельная подъемная сила находится в том же диапазоне или даже ниже (т.е. на малой скорости с наклонной плоскостью взмаха), чем в предыдущем случае с положительным углом атаки взлета (6C и 6F). Эти данные свидетельствуют о том, что стратегия постоянной циркуляции может быть выгодна при более низких скоростях, поскольку она создает большую подъемную силу при более высокой эффективности.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые решили изучить, как складывание и выпрямление крыльев помогает птицам достигать высокой эффективности полета.
Для этого был создан своеобразный механизм, состоящий как из искусственных деталей, так и из природных, а именно натуральных перьев галки. Стоит отметить, что при изучении аэродинамических характеристик крыльев птиц недостаточно просто сымитировать геометрию крыла, нужно также учесть и важность оперения.
Ученые отмечают, что их творения может быть гораздо более полезным для изучения полета птиц, чем сами птицы. Это звучит странно, но для того, чтобы установить диапазон возможностей какой-либо системы, необходимо протестировать ее с применением параметров, уходящих в крайности. Другими словами, птицу нельзя заставить махать так, как это может делать роботизированное крыло.
В результате практических испытаний ученые смогли понять, почему в тех или иных условиях птицы складывают или распрямляют крылья во время полета. Собранные данные будут интересны не только орнитологам, но и робототехникам, которые планируют создать летающих роботов с подвижным крылом.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


