
Сажаем вертолет вслепую: обзор технологий синтетического зрения
Посадка на неподготовленную площадку — один из самых сложных элементов пилотирования вертолета, она сопряжена с повышенным риском аварии и человеческих жертв. Необходимость в посадке на неподготовленные площадки возникает в первую очередь в военной авиации: высадка, эвакуация, доставка боеприпасов и грузов в боевых условиях — в этих полетных заданиях зачастую приходится сажать вертолет в неподготовленной или неразведанной зоне посадки (или зависать непосредственно над ней).
Одной из ключевых проблем при посадке на неподготовленные площадки являются условия недостаточной видимости (УНВ, англ. degraded visual environments, DVE). Под УНВ понимается слабая или нулевая оптическая видимость закабинной обстановки, обусловленная любым из следующих факторов или их сочетанием: слабая освещенность, неблагоприятные метеорологические условия (туман, метель и т. д.), поднимаемый винтом вертолета вихрь твердых частиц. Последний фактор представляет особую опасность.
При посадке на сухой или заснеженный грунт воздушная струя от несущего винта вертолета поднимает твердую взвесь, что критически снижает видимость и может привести к неправильной оценке пилотом положения вертолета относительно земли, кроме того, могут остаться незамеченными препятствия в зоне посадки (большие камни, статичные и движущиеся объекты). Термин «пыльный вихрь» (brownout) описывает это явление при посадке или взлете на сухой поверхности. Подобные же условия при посадке или взлете на заснеженной поверхности описываются термином «снежный вихрь» (whiteout).
В обзоре я рассмотрю решения в области технологий синтетического зрения для безопасной посадки вертолета, позволяющие формировать трехмерное изображение зоны посадки сквозь пыльный или снежный вихрь.
Проблема
Слепая посадка на неподготовленные площадки становится причиной значительного процента авиационных происшествий.
По данным Канадских вооруженных сил, с 1986 по 2006 гг. снежный вихрь стал причиной двух катастроф и 54 аварий вертолетов.

Катастрофа гражданского вертолета из-за снежного вихря. Канада, 20.05.2000.
Схожая статистика приводится и по посадке на песчаную поверхность. С началом операций НАТО на Ближнем Востоке пыльный вихрь становился причиной аварий вертолетов в приблизительно 75% случаев. По данным ВС США с 1990 по 2012 гг. более 30 вертолетов специального назначения было выведено из строя и 60 членов экипажа погибло при выполнении посадки в пыльном вихре в местностях с сухим климатом (Ирак, Афганистан). Ежегодный материальный ущерб Вооруженным силам США от авиационных происшествий при посадке вертолетов в УНВ оценивается в 100 млн. долларов [1].

Катастрофа вертолета AH-64 Вооруженных сил США. Ирак, ноябрь 2003.
Данные по Вооруженным силам РФ не обнародованы. Согласно данным Управления инспекции по безопасности полетов Федерального агентства воздушного транспорта РФ в период с 2001 по первую половину 2014 гг. события при посадке стали причиной 6 катастроф и 24 аварий гражданских вертолетов [2].

Авария гражданского вертолета при посадке.Россия, Ямал, 03.02.2014.
Посадка вертолета в УНВ опасна тем, что вынуждает пилота полагаться на собственные ощущения и бортовые навигационные приборы, данных от которых зачастую оказывается недостаточно. Однако, еще проходя обучение, пилоты привыкают при посадке полагаться в основном на внешнюю визуальную информацию, самостоятельно просматривая выбранную зону посадки на предмет опасности. При этом наземные объекты используются ими в качестве ориентиров для управления пространственным положением воздушного судна. Это становится особенно важным при посадке или маневрировании вблизи различных препятствий, таких как деревья, линии электропередач, мачты и т.д. Из-за присущей всем вертолетам неустойчивости, требующей предельной концентрации при управлении, пилоты должны постоянно отслеживать пространственное положение вертолета.
При управлении вертолетом в УНВ клубы снега или пыли не позволяют разглядеть наземные объекты-ориентиры невооруженным взглядом. В связи с этим резко возрастает зависимость пилота от собственных вестибулярных ощущений. Однако в необычных гравитационно-инерциальных условиях, как, например, в воздухе, информация, передаваемая вестибулярным аппаратом и проприоцепторами, может неправильно толковаться мозгом, что приводит к дополнительным физическим нагрузкам на пилота и может иметь потенциально опасные последствия.
Имея дело с недостаточными и (или) противоречивыми физическими ощущениями, пилот может испытывать кратковременную пространственную дезориентацию. Пространственная дезориентация в данном случае определяется как невозможность восприятия, либо как неправильное восприятие движения и пространственного положения летательного аппарата относительно заданной системы координат, в качестве которой выступает поверхность земли и гравитационная вертикаль [3].
Такая дезориентация может принимать различные формы: пилот не осознает бокового уклона вертолета; у пилота создается ложное ощущение бокового уклона, движения или поворота вертолета, хотя в действительности судно находится в состоянии висения. Иллюзия движения возникает из-за циркуляции снега/пыли снаружи кабины и может происходить во всех шести степенях свободы движения тела, то есть пилоту может казаться, что вертолет линейно перемещается по декартовым осям x, y, z (иллюзия линейного движения) или поворачивается вокруг любой из трёх взаимно перпендикулярных осей (рыскание, тангаж, крен).

Таким образом, ввиду отсутствия визуального контакта с закабинной обстановкой и ненадежности собственных вестибулярных ощущений, для безопасного маневрирования (висения, посадки, взлета) в условиях недостаточной видимости пилот вынужден полагаться преимущественно на показания навигационных индикаторов, информация на которые поступает от бортовых датчиков.
Однако устанавливаемые на современных вертолетах датчики не дают всей необходимой информации в сложных метеоусловиях, так как не способны осуществлять эффективное сканирование зоны посадки сквозь песчаную или снежную взвесь. Кроме того, бортовые навигационные приборы не дают на выходе легкочитаемое изображение, тем самым еще более повышая нагрузку на пилота. Таким образом, к авариям вертолетов при посадке в условиях недостаточной видимости ведут недостоверные визуально-сенсорные ощущения пилота и нехватка информации с бортовых датчиков.
При посадке на неподготовленные площадки помимо преодоления УНВ непосредственно во время приземления, уже на этапе подлета к зоне посадки возникает необходимость точного определения типа, рельефа и характеристик подстилающей поверхности. Например, при посадке на снежно-ледовый грунт необходимо знать состав грунта, толщину снежно-ледового покрова и его плотность, чтобы избежать проваливания вертолета в сугроб или под лед. При этом неровности высотой 0,5 м и более и уклоны поверхности более 15° уже представляют опасность для посадки вертолета, особенно при сильном ветре.
Итак, можно выделить две основные причины авиационных происшествий:
1. Недостаточная осведомленность о пространственном положении вертолета

2. Недостаточная осведомленность о состоянии зоны посадки

Что касается осведомленности о пространственном положении вертолета, то в целом современные бортовые навигационные приборы (GPS, инерциальный измерительный блок, доплеровский измеритель скорости, гироскоп, радиовысотомер) способны дать все вышеперечисленные сведения, однако только при хорошей видимости. Так, большинство современных радиовысотомеров плохо работают в пыльном/снежном вихре и не отображают реальную высоту над землей и скорость снижения.
Еще хуже дело обстоит с сенсорами состояния зоны посадки для обзора сквозь вихрь: существующие решения, такие как традиционные метео-РЛС, тепловизионные и ТВ-камеры, здесь не пригодны, а сенсоры с высокой проникающей способностью находятся на разных этапах технологической готовности. О них и пойдет речь далее.
Решения
Технологические решения проблемы безопасной посадки вертолета на неподготовленную площадку в условиях недостаточной видимости находятся на различных этапах готовности, в мире активно ведутся R&D по созданию систем посадки вертолета, однако на данный момент не существует готового для массового производства коммерческого решения.
Важно еще раз отметить, что любое системное решение по обеспечению безопасной посадки должно решать две задачи:
1. обеспечивать ситуационную осведомленность о пространственном положении вертолета;
2. обеспечивать ситуационную осведомленность о состоянии зоны посадки.
Такая система должна включать в себя, по крайней мере, два компонента:
1. сенсоры с высокой проникающей способностью для сканирования зоны посадки в условиях недостаточной видимости;
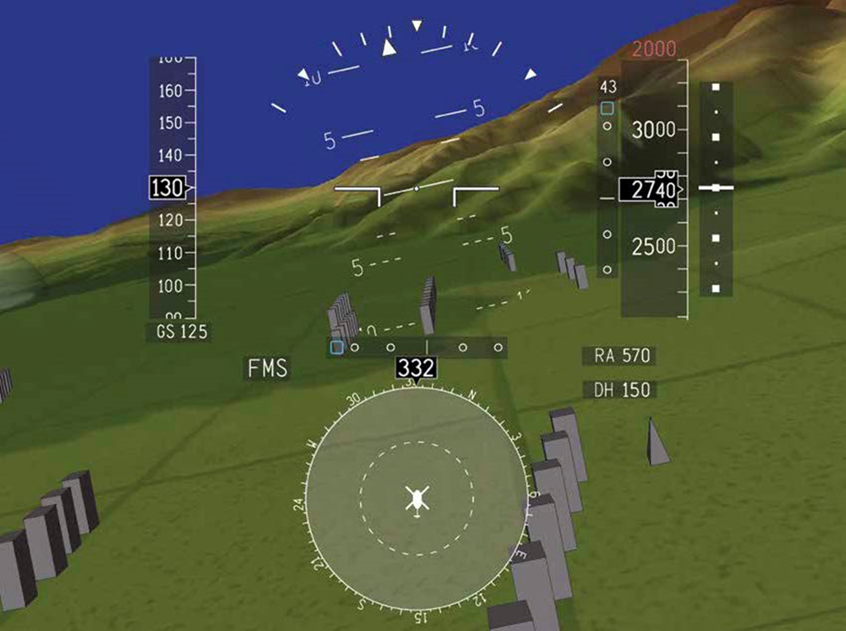
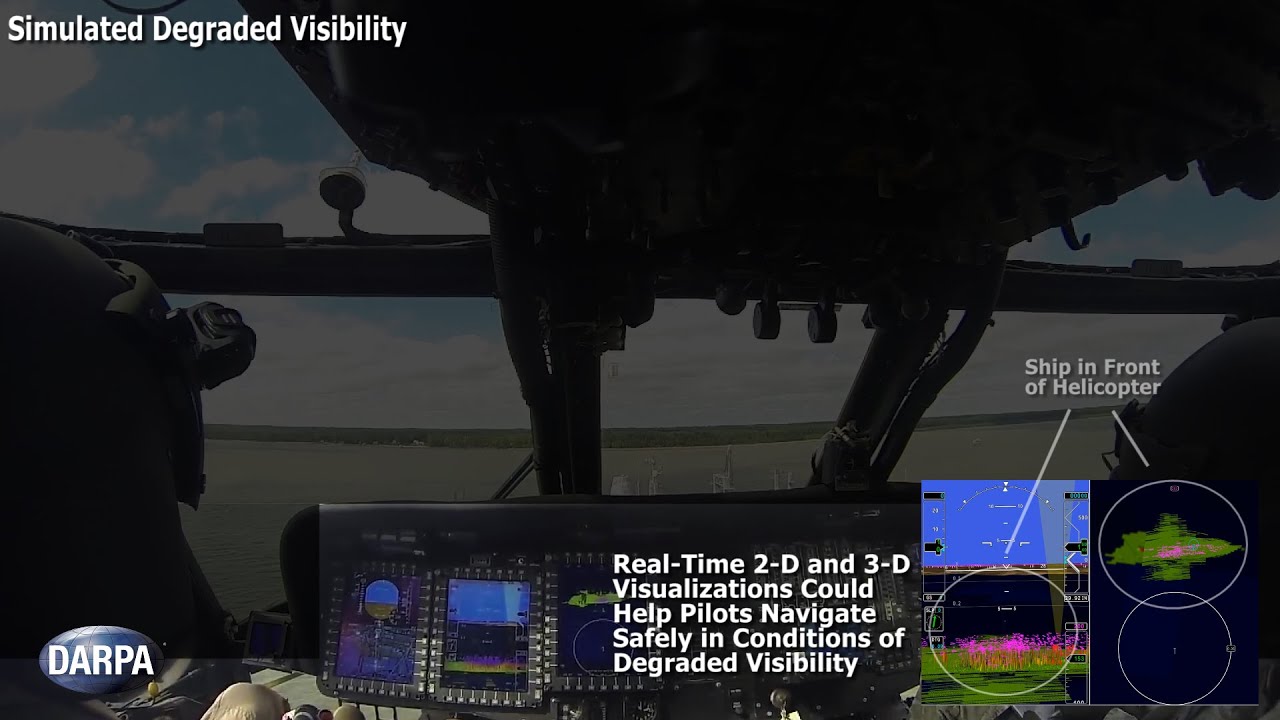
2. дисплейный индикатор для отображения данных с сенсоров в интуитивно-понятном для пилота виде (синтетическое зрение).
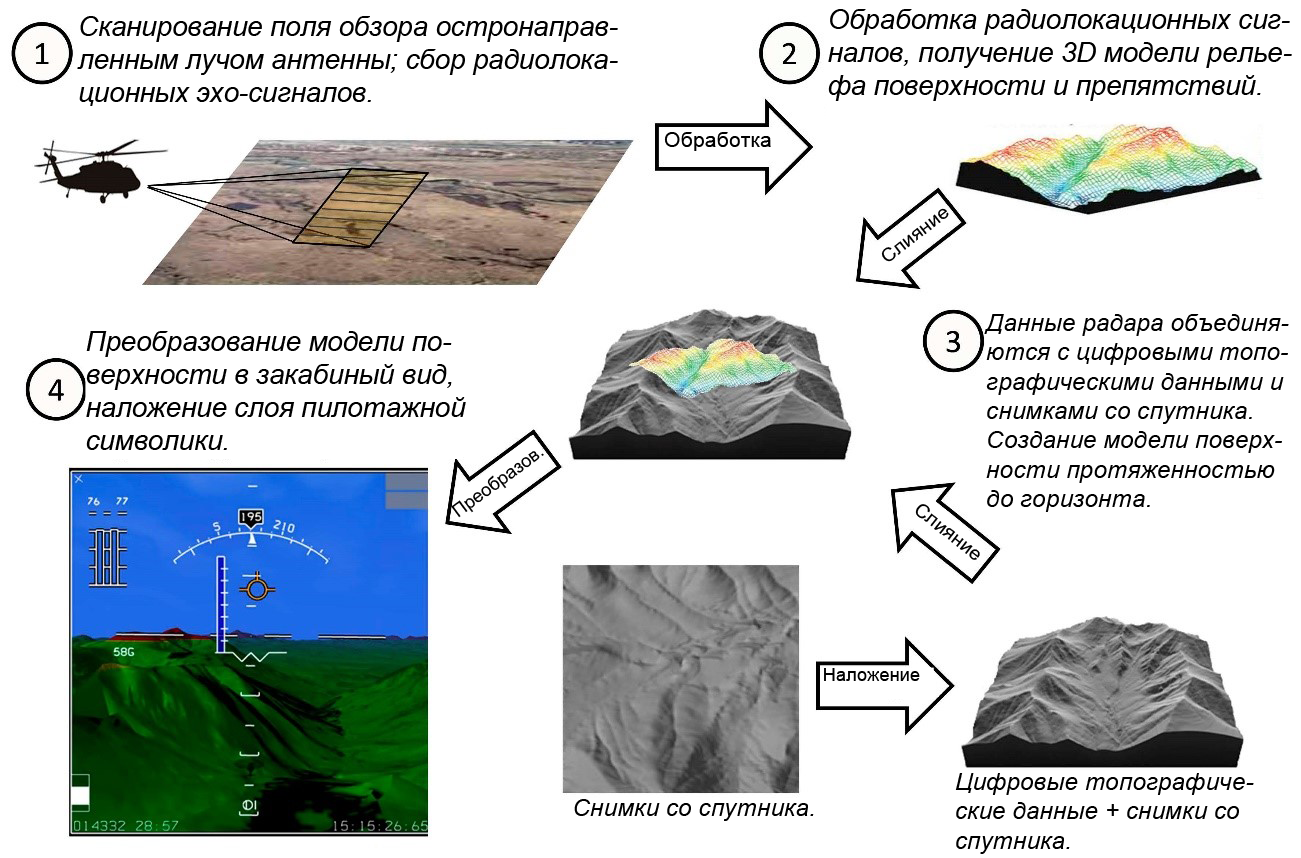
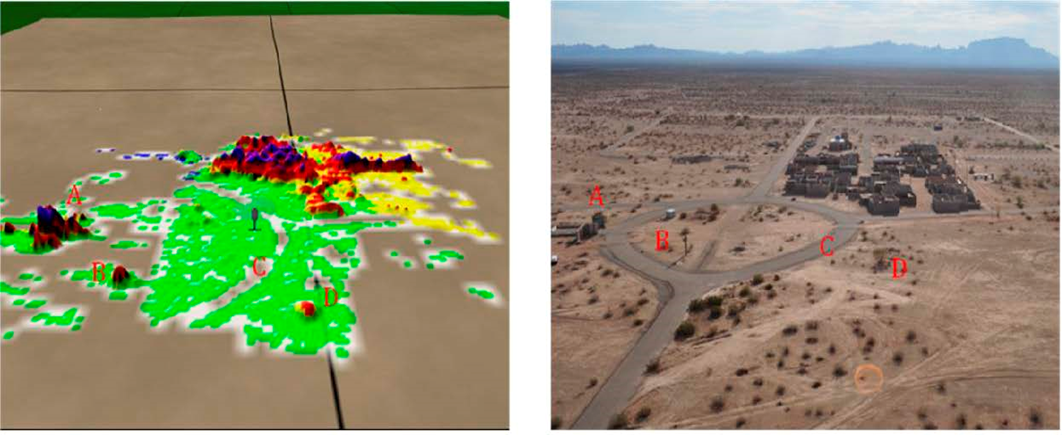
Технология синтетического зрения (synthetic vision) подразумевает обработку получаемого с сенсоров сигнала и его слияние с предварительно загруженными базами данных поверхности, что в итоге дает синтетическое трехмерное изображение зоны посадки. На данный момент системы синтетического зрения находятся на недостаточном технологическом уровне готовности. Основные проблемы таких систем заключаются в обеспечении сбора сенсорами релевантной информации, включая ориентиры местности и препятствия, а также в отображении этой информации в легко читаемой форме. Это зависит от эффективности обработки полученных данных и надежности методов слияния изображений, однако ни то, ни другое не являются достаточно развитыми технологиями.
Технология синтетического зрения
В настоящий момент наиболее развиты технологии, разработанные для уже существующих пилотажных применений. В области датчиков и сенсоров это GPS, инерциальный измерительный блок, доплеровский измеритель скорости, гироскоп, радиовысотомер (определяют пространственное положение вертолета), метео-РЛС сантиметрового диапазона, ТВ и ИК камеры, лазерные локаторы — лидары (определяют состояние зоны посадки). В области индикаторов это традиционная пилотажная символика и нашлемные индикаторные модули (дневной индикатор и индикаторные очки ночного видения).
ТВ и тепловизионные ИК камеры, лидары позволяют просматривать избранную зону посадки с хорошим разрешением до начала пыльного/снежного вихря, однако их эффективность в УНВ крайне ограничена. Метео-РЛС сантиметрового диапазона обладают хорошей проникающей способностью, однако их недостатки заключаются в низком разрешении по дальности вследствие недостаточной широкополосности излучаемых сигналов, ограниченной скорости сканирования из-за использования механического привода в большинстве антенн и в слишком большой слепой зоне вследствие использования импульсных сигналов. Все эти факторы в совокупности делают метео-РЛС непригодными для определения состояния зоны посадки на небольших расстояниях, обеспечивающих достаточное разрешение.
Исследованию проблемы безопасной посадки вертолета в условиях пыльного/снежного вихря уделяется большое внимание в государствах-членах НАТО, чьи вооруженные силы понесли большие потери от аварий и катастроф вертолетов во время боевых действий на Ближнем Востоке. На основании технических докладов НАТО наиболее перспективными направлениями для решения проблемы посадки в пыльном вихре признаны радиолокация в миллиметровом диапазоне волн и лазерная локация. Лидары имеют более высокое пространственное разрешение, чем радары, однако они подвержены более высокому затуханию в пыльном вихре. Напротив, РЛС миллиметрового диапазона имеют незначительное затухание и обеспечивают приемлемое пространственное разрешение.
Радары W диапазона
Активная РЛС миллиметрового диапазона с рабочей частотой 77–94 ГГц может осуществлять эффективное сканирование сквозь пыльный вихрь. В современных западных образцах применяются и адаптируются существующие радарные технологии, например, радары головок самонаведения ракет. Радиолокационная информация накладывается на сохраненную базу данных поверхности, после чего синтетическое изображение зоны посадки с отмеченными цветом препятствиями выводится на дисплейный индикатор (бортовой или нашлемный).
Наибольшее количество испытаний радиолокационных систем посадки было проведено в США.
Sandblaster — США
C 2007 по 2009 гг. под эгидой DARPA разрабатывалась и испытывалась система Sandblaster на основе РЛС 94 ГГц. В разработке системы принимали участие компании Sikorsky, Honeywell и Sierra Nevada Corporation. Вертолет, оснащенный опытным образцом системы, произвел успешную посадку в пыльном вихре. Были также проведены испытания по обнаружению проводов, в результате которых было показано, что пылепроникающий сенсор Sandblaster отчетливо видит линии электропередач [4].


Состав системы:
- 94 ГГц импульсный радар (Sierra Nevada Corp.)
- Базы данных поверхности с информацией о рельефе и статических препятствиях (Honeywell)
- Блок обработки и слияния радиолокационных сигналов и баз данных (Honeywell)
- Пилотажная символика(Honeywell и Sikorsky)
- Индикатор синтетического зрения (Sikorsky)
- Электродистационная система управления полетом (Sikorsky)

Из отчета пилотов, проводивших тест системы: «разрешающая способность радара была ниже, чем хотелось бы, и время сканирования площадки для приземления также оказалось больше, чем хотелось бы».
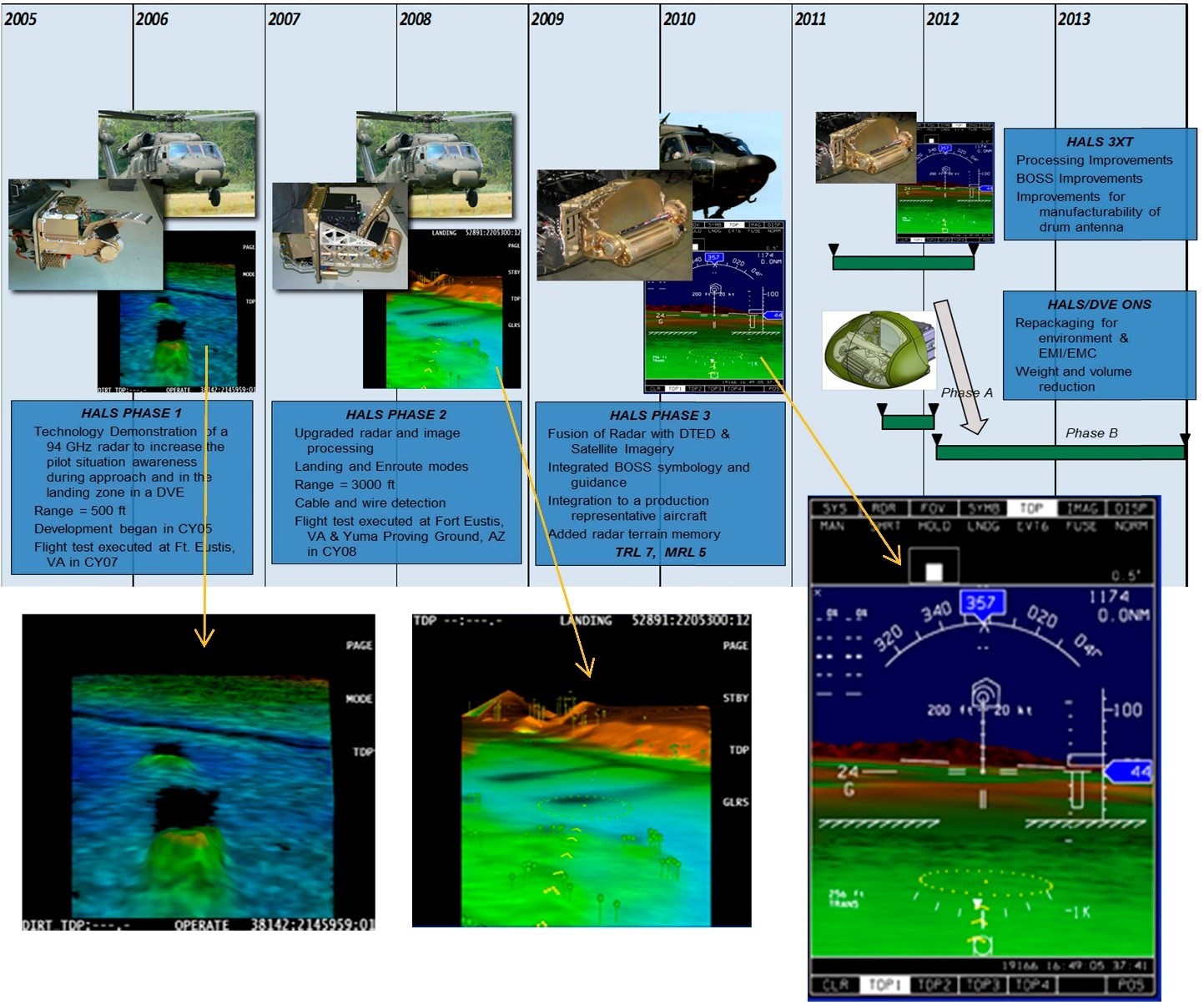
HALS (Helicopter Autonomous Landing System) — США
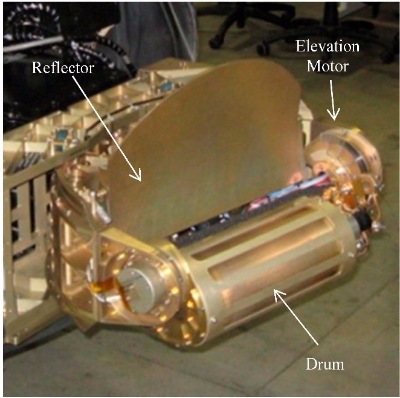
Еще одна система посадки на основе радара W диапазона, HALS (Helicopter Autonomous Landing System), разрабатывается компанией Sierra Nevada Corporation (США) с 2005 г. На данный момент представлено третье поколение системы HALS-3XT. Как и в системе Sandblaster, в HALS-3XT используется радар 94 ГГц с механическим сканированием. Антенная конструкция с решёткой, напечатанной на вращающемся цилиндрическом барабане, поддерживает приемлемую скорость сканирования. Пространственное разрешение сканирования системы составляет 20 см, радиус обзора – более 1000 м.
Состав системы:
- 94 ГГц импульсный радар
- Антенна с дифракционной решёткой, напечатанной на вращающемся цилиндрическом барабане
- Антенная решетка с электронным сканированием (в разработке)
- Базы данных поверхности
- Блок обработки и слияния радиолокационных сигналов и баз данных
- Пилотажная символика BOSS (Brownout Symbology System)
Сообщается о разработке антенной решетки с электронным сканированием для системы HALS[5].
BLAST (Brownout landing aid system) — Великобритания
В системе BLAST (Brownout landing aid system) производства BAE Systems в качестве радара используется моноимпульсный радар самонаведения ракеты MBDA Brimstone 94 ГГц.
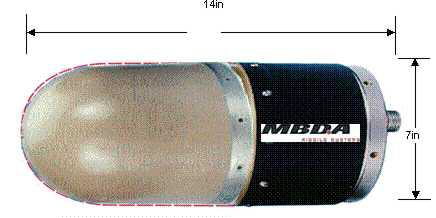
Сообщается, что минимальный обнаруживаемый системой BLAST диаметр проводов ЛЭП составляет 3,2 мм. Производитель также сообщает о возможности замены основного сенсора системы на лидар или длинноволновую ИК-камеру[6].
Состав системы:
- 94 ГГц моноимпульсный радар с линейной частотной модуляцией (FMCW)
- Используется радар ракеты MBDA Brimstone
- Базы данных поверхности
- Блок управления и обработки сигнала
- Пилотажная символика BOSS (Brownout Symbology System)

Лидары
Технологии лазерной локации также активно развиваются как средство обеспечения безопасной посадки вертолета. Несмотря на то, что лидар (тж. ладар, light/laser detection and ranging) имеет более высокое затухание в пыльном вихре, дожде и тумане, чем РЛС W диапазона, при сканировании зоны посадки на наличие препятствий лидар может обеспечить намного более высокое пространственное разрешение. Снимки зоны посадки, сделанные лидарным сенсором до начала пыльного вихря, обновляют динамическую навигационную базу данных, после чего на индикаторе пилота выводится изображение с кодированными цветом препятствиями. Стандартная дальность обнаружения реальных целей (рельефа местности, домов, деревьев) составляет более 1000 м, дальность обнаружения проводов среднего диаметра 5 мм составляет 600 м.
В 2009 г. Научно-исследовательской лабораторией ВВС США была испытана лидарная система 3D-LZ, сенсор для которой был разработан компанией Burns Engineering (США). Разрешение сканирования было в 20 раз выше, чем у радаров миллиметрового диапазона. Пилоты были способны обнаружить объекты высотой 45 см[7].
Лидарная система DUSPEN (Dust Penetrating System) разрабатывается компанией Areté Associates (США)[8].
Лазерный локатор HELLAS (Helicopter Laser Radar), выпускаемый немецким концерном EADS, активно применяется на вертолетах полиции Германии и ВС США. В настоящее время лидар HELLAS доработан и выпускается входящей в концерн EADS компанией Airbus Defence and Space в составе системы безопасной посадки вертолета SFERION (Situational awareness system).

В системе ADAS (Advanced Distributed Aperture System) производства Raytheon (США) используется оптическое зондирование в ближнем ИК-диапазоне, а также трехмерное аудио-оповещение пилота при приближении к препятствиям.

Комплексным решением для пилотирования вертолета в условиях недостаточной видимости является система HeliSure разработки Rockwell Collins (США).
Компоненты HeliSure H-SVS (Helicopter Synthetic Vision System) и H-TAWS (Helicopter Terrain Awareness and Warning System) улучшают ситуационную осведомленность экипажа и позволяют формировать высокореалистичное трехмерное изображение нижележащей поверхности и зоны посадки. Однако данных о технологии, лежащей в основе сенсоров, в открытом доступе не представлено.

В 2013 г. Министерство обороны США запустило программу DVEPS (Degraded Visual Environment Pilotage System), в рамках которой до 2018 г. должна быть разработана комплексная система посадки в УНВ. В программе участвуют Boeing, Rockwell Collins, BAE Systems, Sierra Nevada Corp.
Параллельно с этим, агентством DARPA запущено несколько новых проектов, призванных способствовать решению проблемы безопасной посадки в УНВ (прежде всего, в пыльном вихре). В рамках проекта DARPA MFRF (Multifunction RF) разрабатывается РЛС с активной фазированной антенной решеткой (АФАР) миллиметрового диапазона для обеспечения посадки военной авиации в УНВ. В разработках участвуют BAE Systems совместно с Rockwell Collins, Mustang Technology Group, Honeywell, Applied Signal Intelligence и Мичиганским университетом.
Проект AWARE-LS (Advanced Wide Field-of-View Architectures for Image Reconstruction and Exploitation) направлен на разработку нового поколения сенсоров формирования изображения (ИК камер, лидаров, оптических камер, радаров миллиметрового диапазона) и алгоритмов обработки данных для создания высокореалистичного изображения закабинной обстановки в неблагоприятных атмосферных условиях. В проекте участвуют Northrop Grumman Corp. и Университет Мемфиса.
1. “Rotary-Wing Brownout Mitigation: Technologies and Training”. A Technical Report by NATO Research and Technology Organisation, North Atlantic Treaty Organisation (Jan. 2012).
2. Анализ состояния безопасности полетов в гражданской авиации Российской Федерации в первом полугодии 2014 года. Управление инспекции по безопасности полетов Федерального агентства воздушного транспорта Российской Федерации. (Авг. 2014).
3. Robert Cheung. “Spatial Orientation – Nonvisual Spatial Orientation Mechanisms” // F. Previc, W. Ercoline (Eds.) Spatial Disorientation in Aviation. Progress in Astronautics and Aeronautics Volume 203. American Institute of Aeronautics and Astronautics, Inc. Restin, VA, USA. (2004), 37–94.
4. TTPC-AER-TP2-2011 Task outcome report for enhanced/synthetic vision pilotage systems. The Technical Co-operation Program. 2011.
5. Jack Cross; John Schneider and Pete Cariani. » MMW radar enhanced vision systems: the Helicopter Autonomous Landing System (HALS) and Radar-Enhanced Vision System (REVS) are rotary and fixed wing enhanced flight vision systems that enable safe flight operations in degraded visual environments «, Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370G (May 16, 2013)
6. Brian Sykora. «BAE systems brownout landing aid system technology (BLAST) system overview and flight test results», Proc. SPIE 8360, Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications IX, 83600M (May 1, 2012).
7. James Savage; Walter Harrington; R. Andrew McKinley; H. N. Burns; Steven Braddom, et al. «3D-LZ helicopter ladar imaging system», Proc. SPIE 7684, Laser Radar Technology and Applications XV, 768407 (April 29, 2010).
8. James T. Murray; Jason Seely; Jeff Plath; Eric Gotfreson; John Engel, et al. » Dust-Penetrating (DUSPEN) “see-through” lidar for helicopter situational awareness in DVE «, Proc. SPIE 8737, Degraded Visual Environments: Enhanced, Synthetic, and External Vision Solutions 2013, 87370H (May 16, 2013).
Похожие статьи
 Физики впервые создали квантовый материал, работающий при комнатной температуре
Физики впервые создали квантовый материал, работающий при комнатной температуре Забытый шедевр среди операционных систем
Забытый шедевр среди операционных систем Как я выпустила альбом электроники, созданный на основе звуков рек?
Как я выпустила альбом электроники, созданный на основе звуков рек? Как работают электрические рыбы?
Как работают электрические рыбы? От зефира к фаллосу: как Ридли Скотт спас «Чужого»
От зефира к фаллосу: как Ридли Скотт спас «Чужого» В США разрешили развертывание первой орбитальной группировки космических отражателей
В США разрешили развертывание первой орбитальной группировки космических отражателей Уход Солнца
Уход Солнца WebTV: как интернет пришел на экраны телевизоров
WebTV: как интернет пришел на экраны телевизоров