
Per aspera ad astra, или как я строил ракету. Часть 2. Собираем альтиметр на STM32 и BMP280
Всем привет!
В предыдущей части я остановился на том, что мои ракеты удачно взлетели и приземлились, а на одной даже был установлен альтиметр. В этой статье я и расскажу о том как сделать простой высотомер на основе STM32 Nucleo L031K6 и датчика давления BMP 280 , который к тому же хранит все данные во Flash памяти.
Выбор железа
Основные требования к альтиметру:
- Высокая скорость считывания высоты, так как ракета в апогее находится не слишком долго, а я хотел узнать именно максимальную высоту;
- Низкое энергопотребление, чтобы не ставить большой аккумулятор;
- Небольшие размеры всей конструкции.
Исходя из них в качестве микроконтроллера взял STM32 Nucleo L031K6 (высокая скорость работы, низкое потребление тока, малый размер). Высоту решил измерять с помощью барометра BMP280 (те же резоны, что и у МК). Также добавил кнопку, при нажатии которой начиналась запись высоты. Ну и питала всю электронику батарейка CR2032, подключенная через адаптер. В итоге получилась такая схема:
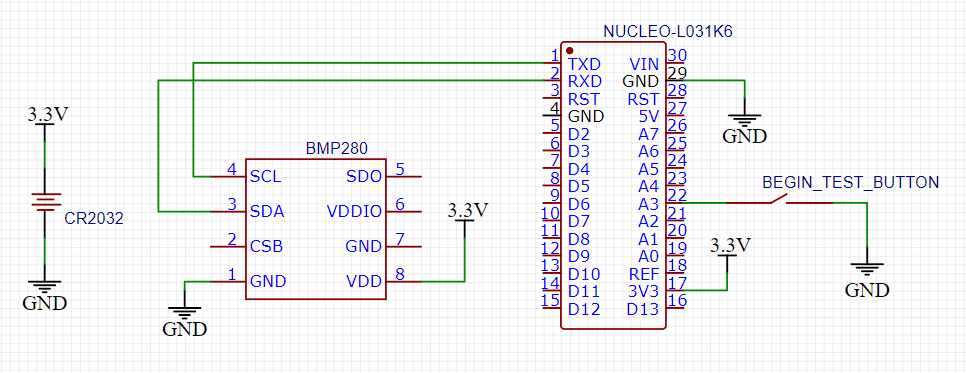

STM32 Nucleo L031K6
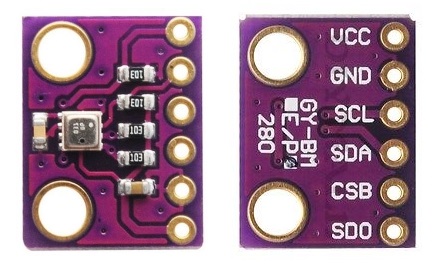
BMP280

Адаптер для CR2032
Разработка кода
Код вы можете найти на моем гитхабе . Пины STM32 были сконфигурированы в CubeMX под IAR. Для работы с BMP280 использовал вот эту библиотеку, добавил в нее функцию расчета высоты над уровнем моря с помощью барометрической формулы и инициализацию датчика с нужными мне параметрами частоты считывания, фильтрации и тд. Так как я хотел измерить высоту полета относительно земли, мне нужно было сначала вычислить высоту над уровнем моря в моей местности, взять ее за «ноль» и относительно нее измерять высоту полета. Частота измерений равнялась 10 Гц.
Запись во Flash память происходила следующим образом так:
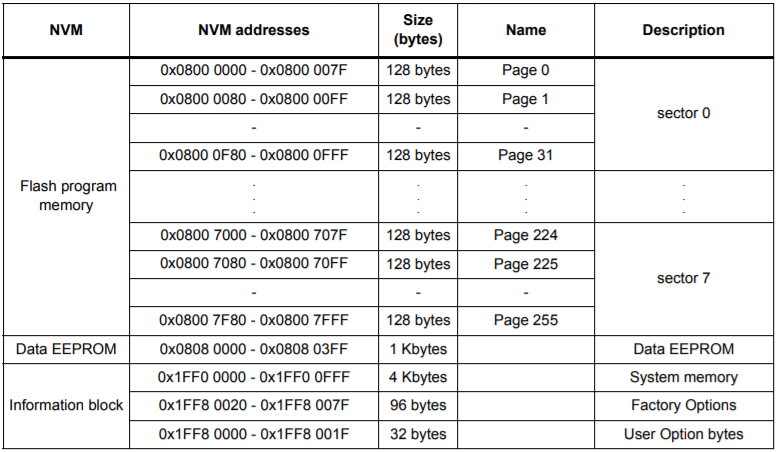
- Для всех измерений выделил 8 Кбайт с 0x08006000 по 0x08007FFF адреса
- На одно измерение выделил 2 байта
- Во Flash записывал по 4 байта, то есть сразу два измерения
- Максимальное количество измерений — 4096, этого хватало на запись примерно 7-ми минут полета
- Высоту записывал в сантиметрах для большей точности
А происходила запись следующим образом:
- Если итератор записи четный, то в переменную с данными для записи во Flash сохраняем текущую высоту в младшую половину слова;
- Если итератор записи нечетный, то в переменную с данными для записи во Flash добавляем текущую высоту в старшую половину слова и сохраняем эту переменную в ячейку Flash
В итоге алгоритм работы программы следующий:
- После включения 5 секунд ждем нажатия кнопки для старта измерений высоты.
- Если кнопка не была нажата, то зажигаем встроенный светодиод и начинаем передачу по UART данных о высоте, записанных во Flash памяти
- Если кнопка была нажата, то два раза моргаем встроенным светодиодом и вычисляем высоту местности.
- После вычисления «нуля» два раза моргаем встроенным светодиодом и записываем во Flash-память высоту ракеты над землей.
- Когда выполнили передачу по UART или завершили измерения высоты, бесконечно моргаем встроенным светодиодом;
- Ждем пока нас найдут люди и выключат.
При питании STM’ки от CR2032 через пин 3.3V обнаружил, что код не работает. Проблема была в том, что при подаче питания через эту ногу необходимо было отпаять SB9 (расположен рядом с выводами RX и TX на обратной стороне МК) иначе плата постоянно перезагружалась.
Теперь необходимо было проверить точность работы альтиметра. Взяв рулетку, я стал поднимать альтиметр на разные высоты и смотреть, что он измеряет. Результаты тестов лежат в соответствующей папке на гитхабе. В текстовых файлах — сырые данные с STM’ки, а в Excel’евских таблицах находятся красивые графики всех тестов. Точность соответствовала заявленной — ± 10см. Следует помнить, что высоту я измерял в сантиметрах, поэтому в таблице такие большие числа.
Сборка альтиметра
Так как во время приземления ракета может сильно ударится о землю, необходимо было хорошо зафиксировать всю электронику, чтобы при тряске не отваливались проводки, или, того хуже, сами модули. Альтиметр разместил в головном обтекателе (места там было достаточно, и стабильности за счет смещения центра тяжести к головному обтекателю прибавилось) в 3D-печатном креплении. STM’ка стояла вертикально, BMP280 контактами вверх и под крепление приклеил адаптер для CR2032. Из-за того, что он не помещался в корпус ракеты, пришлось немного сточить контакты минуса. Рядом с контактами в боковой стенке 3D-печатного крепления проточил вертикальную канавку, чтобы протянуть через нее минус от CR2032, а под плюсом просверлил отверстие и пустил провод через него. Думал крепить альтиметр к головному обтекателю с помощью самореза, поэтому в корпусе есть отверстие, но потом от этой идеи отказался.
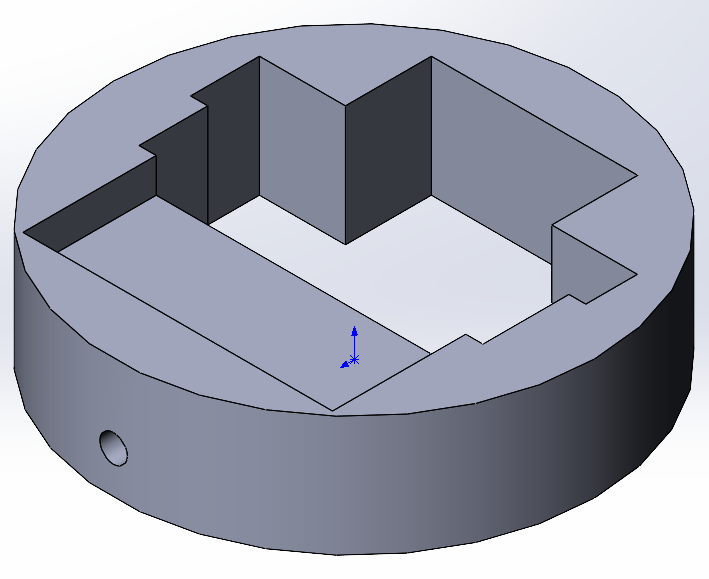
Модель крепления, напечатанного на 3D-принтере
Вид сверху
Вид снизу
Кнопку приклеил рядом с BMP280, установил остальные модули в свои места, припаял все провода и замотал все синей изолентой залил для надежности термоклеем.
В обтекатель ракеты альтиметр плотно вставлялся. Для того, чтобы он никуда не отлетел после удара, протянул через отверстие в креплении резинку, соединяющую корпус ракеты и обтекатель.
Собранный альтиметр. Вид спереди

Вид сзади. Видна резинка, соединяющая альтиметр с ракетой
Альтиметр был готов! Теперь предстояло его испытать, а это значит, что я снова отправился на полигон!
Запуск альтиметра и результаты измерений
К сожалению первый запуск был с неисправными двигателями, о которых я писал в прошлой статье.
В итоге график получился таким:
По горизонтали — номер измерения. Каждые 10 измерений — 1 секунда. По вертикали — высота в сантиметрах
Ракета взлетела на 15м, затем устремилась в землю. После прохождения апогея через 1 секунду началась какая-то аномалия: после значения 12м почему-то показания упали до -8м. Это произошло в момент второго запуска двигателя (которого не должно было быть), так что не исключаю, что неисправный двигатель как-то повлиял на альтиметр. Во всех остальных тестах он работал отлично, так что это была проблема явно не в электронике. В общем, те испытания альтиметра были успешными лишь наполовину, так как во вторую половину полета произошла аномалия. Сам график вы можете найти на гитхабе, он называется rocket_flight_fall_test.
После ремонта ракеты я снова отправился на полигон и в этот раз испытания прошли успешно. Полет был отличным, показания альтиметра были стабильными и соответствовали полету. График полета получился вот такой:

По горизонтали — номер измерения. Каждые 10 измерений — 1 секунда. По вертикали — высота в сантиметрах
Ракета поднялась на 150м и успешно приземлилась. Таким образом это испытание было полностью успешным. Я удостоверился в том, что альтиметр работает и приступил к разработке новой бортовой аппаратуры.
Заключение
В итоге, я полностью собрал компактный альтиметр, который помещается в небольшую модель ракеты. Испытания прошли успешно, электроника пережила взлет и посадку и измерила высоту полета. На этом проект разработки альтиметра я закончил, возможно в будущем использую его в одной из ракет, потому что знать высоту полета иногда очень полезно (например, если вы запускаете ракеты ради достижения максимальной или какой-нибудь определенной высоты). Сейчас, как я уже говорил, я занимаюсь разработкой бортовой камеры с радиопередатчиком, потому что ракету с такой серьезной электроникой я терять не намерен.
Спасибо за внимание!
Похожие статьи
 Физики впервые создали квантовый материал, работающий при комнатной температуре
Физики впервые создали квантовый материал, работающий при комнатной температуре Забытый шедевр среди операционных систем
Забытый шедевр среди операционных систем Как я выпустила альбом электроники, созданный на основе звуков рек?
Как я выпустила альбом электроники, созданный на основе звуков рек? Как работают электрические рыбы?
Как работают электрические рыбы? От зефира к фаллосу: как Ридли Скотт спас «Чужого»
От зефира к фаллосу: как Ридли Скотт спас «Чужого» В США разрешили развертывание первой орбитальной группировки космических отражателей
В США разрешили развертывание первой орбитальной группировки космических отражателей Уход Солнца
Уход Солнца WebTV: как интернет пришел на экраны телевизоров
WebTV: как интернет пришел на экраны телевизоров