Как и анонсировал в предыдущей статье про линейку, я завершил работу над проектом многоканального тестера сервоприводов и готов поделиться всеми материалами с сообществом. Его вполне можно изготовить в домашних условиях, но я заказал партию плат и сейчас мой тестер выглядит вот так:

Для чего это нужно
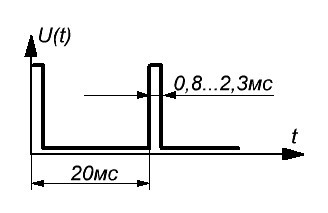
В хоббийной электронике широко применяются системы с управлением при помощи PWM-сигнала. Это последовательность импульсов с частотой 50Гц. Информация в них кодируется в виде длительности импульсов, которые могут меняться от 0,8 до 2,3мс. Крайние значения этого диапазона могут незначительно отличаться у разных производителей.
Сервоприводы для строительства авиамоделей, гексаподов, манипуляторов и т.д., используют именно такой сигнал. Как правило они имеют три провода — питание, общий и сигнал. Также в авиамоделировании, автомоделировании, коптеростроении регуляторы хода коллекторных и бесколлекторных моторов используют такой же управляющий сигнал, который определяет скорость и направление вращения двигателей.
Источником такого сигнала может служить пульт управления, запрограммированный контроллер или что-то подобное. Но очень часто на этапе строительства бывает удобно применить тестер сервоприводов, который генерирует такой же сигнал в ручном режиме. Это позволяет заранее проверить работоспособность механики, измерить крайние положения и т.д.
Особенности и характеристики нашего прибора
Большинство тестеров, которые сейчас можно купить либо очень просты, либо дорого стоят. Я хотел сделать как можно дешевле, но при этом дать ему максимально широкий функционал. Вот что у меня получилось:
- Шесть независимых каналов управления. Именно независимых! Обычно в готовых можно подключить одновременно несколько двигателей, но сигнал на них один и тот же. На моем приборе можно даже запустить один в автоматическом режиме, а остальными управлять по очереди в ручном и т.д.
- Формирование сигнала и индикация в микросекундах. В большинстве тестеров индикация отображается не понятно в чем, либо отсутствует вовсе
- Минимальный шаг изменения длительности — 1мкс. То есть диапазон 0,8-2,3мс разбит на 1500 шагов
- Возможность подключения к ПК. Можно использовать его, например, в паре с Raspberry Pi. Сам сигнал будет формироваться при этом существенно точнее, чем средствами самого одноплатного компьютера
- Открытость. В конце статьи вы сможете найти все файлы, необходимые для самостоятельного изготовления тестера
А вот его характеристики:
- Напряжение питания — 5В
- Потребляемый ток (без сервоприводов), не более — 100мА
- Длительность формируемых импульсов — 0,8-2,3мс
- Точность установки длительности — 1мкс
- Частота следования импульсов — 50Гц
- Скорость соединения с ПК — 9600, 8 bits, 1 stop bit
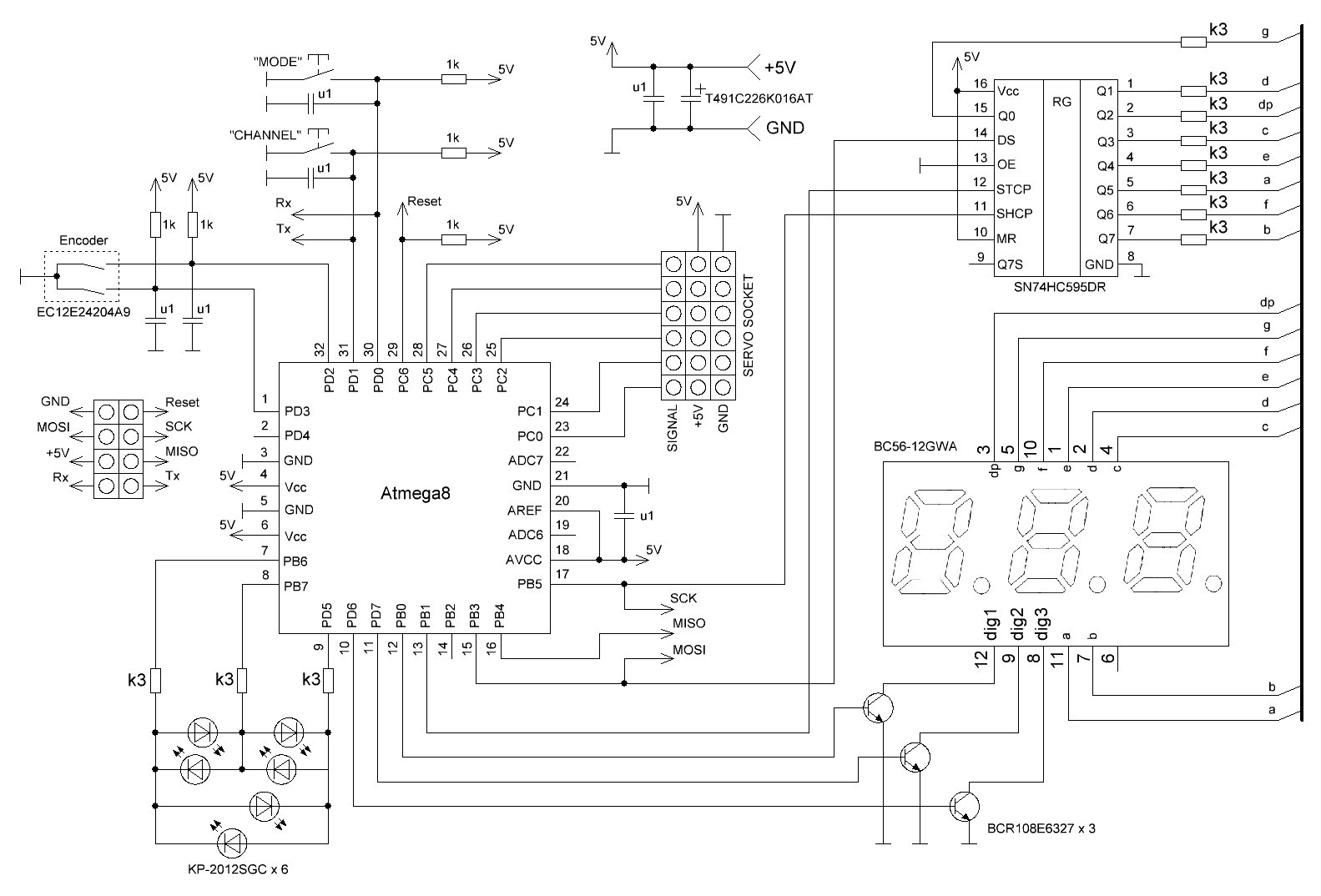
Схема тестера сервоприводов
Работая над схемой я старался максимально удешевить ее и сделать простой в повторении. В качестве управляющего контроллера использован народный контроллер Atmega8A-AU.
Трехразрядный семисегментный дисплэй подключается через сдвиговый регистр и логические транзисторы. Шесть светодиодов служат для отображения текущего режима и подключены они методом так называемого чарлиплексирования для экономии выводов МК.
Для управления использован обычный инкрементальный энкодер и две кнопки. Энкодер управляет установленным углом, а кнопки переключают режим управления и текущий канал. Везде стоят конденсаторы от дребезга контактов, так что все это работает очень даже четко.
Разъемы тестера предназначены для подключения самих сервоприводов, программирования, подключения к ПК и питания. Я принял решение не устанавливать на плату стабилизатор питания. То есть для ее использования не получится использовать напряжение аккумуляторов напрямую. Необходимо найти источник или стабилизатор на 5В с током, соответствующим току, потребляемому подключаемыми двигателями.
Печатная плата подготовлена в формате Sprint Layout. Это двухсторонняя плата, но я рисовал ее так, чтобы можно было изготовить ее в домашних условиях ЛУТом или фоторезистом, а в переходные отверстия легко можно запаять перемычки с одной стороны платы на другую.
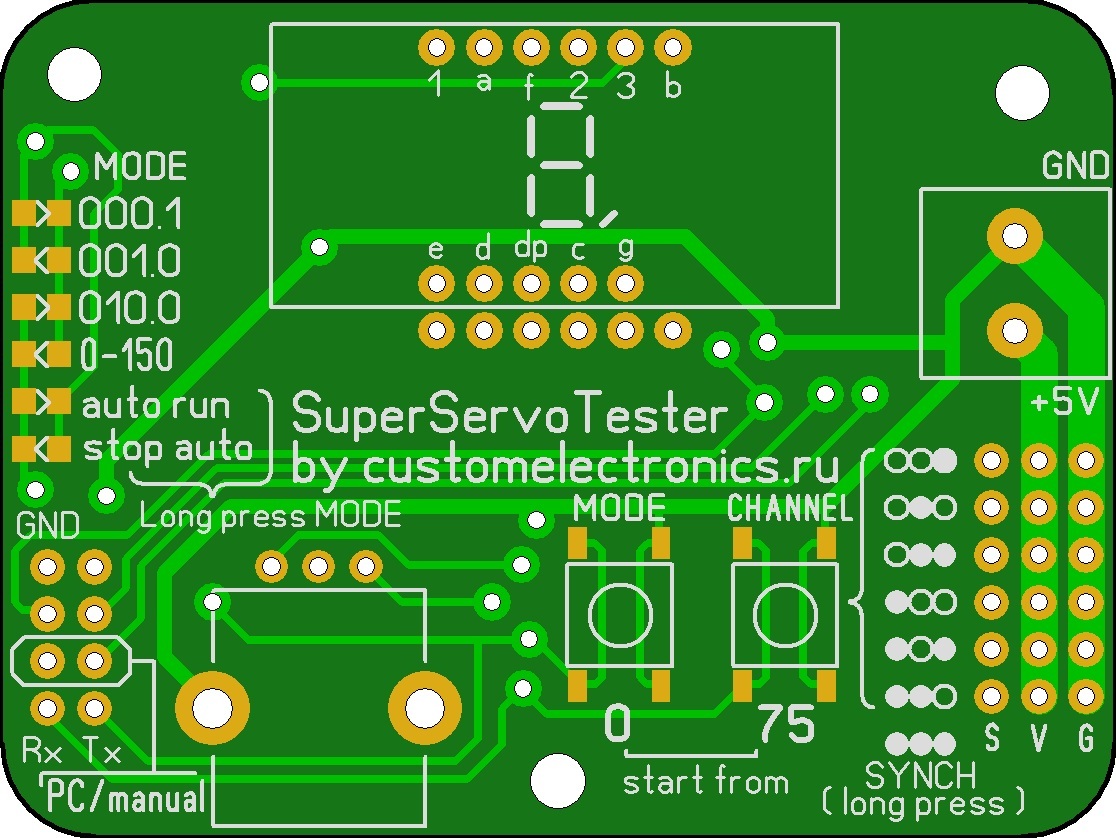
Лицевая сторона платы
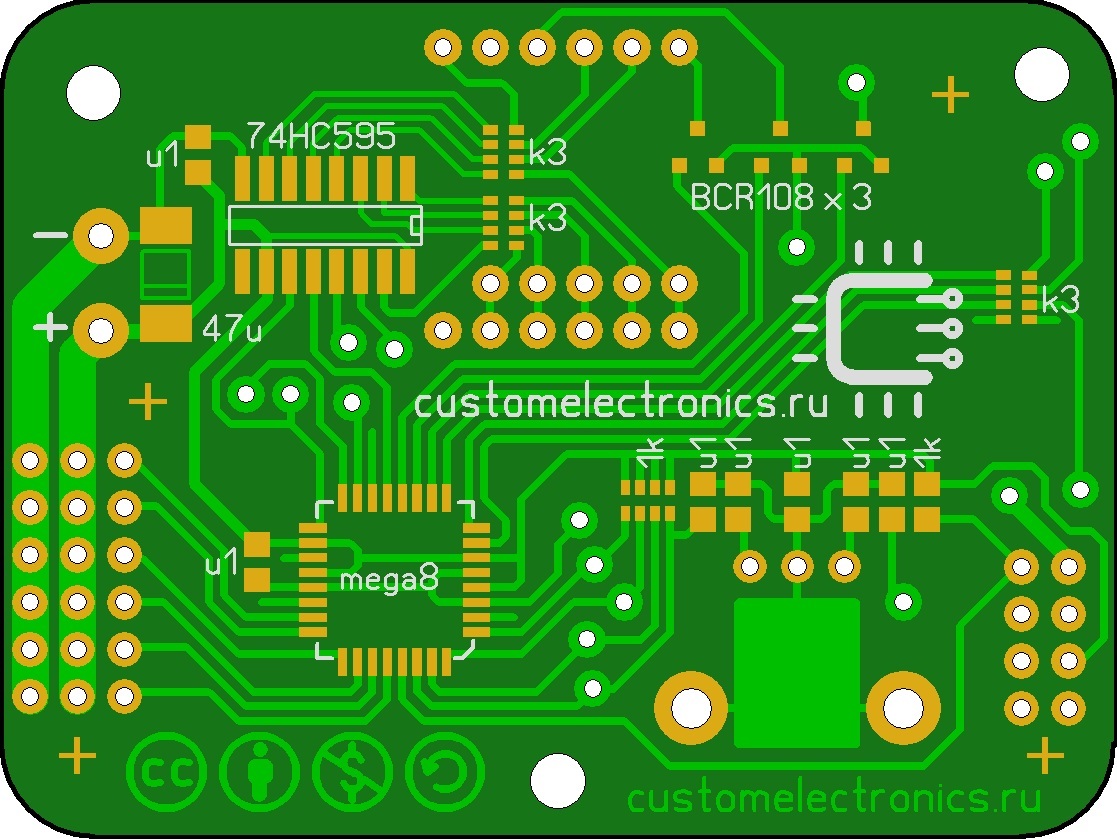
… и обратная
Я изготавливал эту плату в ручную и все это мной проверено и работает:
Также я провел небольшую кампанию среди подписчиков сообществ Товары из Китая радиолюбителю и нашего местного хакспэйса MakeItLab и нашел людей, которые поддержали выпуск небольшой партии устройств. Пользуясь случаем, хочу выразить им свою благодарность. Вот так выглядит устройство в заводском исполнении:
Список компонентов
Вот полный список со ссылками:
- Микроконтроллер Atmega8A-AU в корпусе TQFP44
- Трехразрядный семисегментный дисплей с общим катодом BC56-12GWA. Если вы обратили внимание, на плате предусмотрено место для установки другого, существенно более дешевого дисплея с aliexpress
- Сдвиговый регистр SN74HC595DR в корпусе SOIC16
- Логический транзистор BCR108E6327 в корпусе SOT23 — 3шт
- Светодиоды KP-2012SGC, либо любые другие в корпусе 0805 — 6шт
- Инкрементальный энкодер EC12E24204A9
- Танталовый конденсатор T491C226K016AT (22мкФ-16В, типоразмер C)
- Конденсатор 0,1мк в корпусе 0805 — 7шт
- Резистор 1кОм в корпусе 0805
- Резисторная сборка 1кОм в корпусе 0603×4
- Резисторная сборка 300 Ом в корпусе 0603×4 — 3шт
- Кнопка без фиксации типа DTSM20-4.3N — 2шт
- Клеммная колодка с шагом выводов 5,08 с двумя контактами
- Гребенка контактов PLS-40 (всего потребуется 26 штырьков)
- Джампер
Корпус
Еще я нарисовал и распечатал на 3D-принтере небольщую оправку и ручку на энкодер. Файлы для скачивания чуть позже.
Прошивка
Файлы прошивки будут в конце статьи. Прошить контроллер можно при помощи любого ISP-программатора через стандартный 6ти-пиновый разъем. На плате шесть из восьми контактов слева от энкодера предназначены в первую очередь именно для этого.
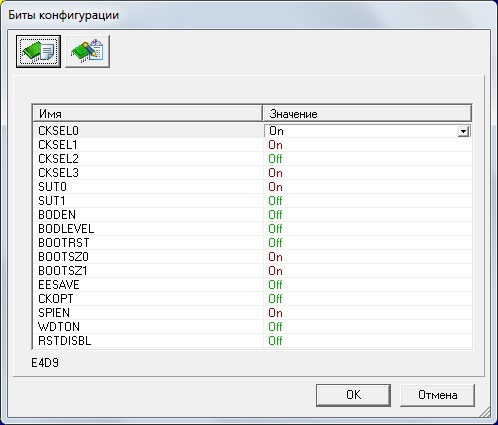
Фьюз-биты необходимо установить так, как показано на рисунке:
Работа тестера
Проще, конечно, один раз увидитеть:

Для запуска тестера в ручном режиме управления необходимо, чтобы перемычка «PC/Manual» при включении питания была установлена
При запуске в ручном режиме на дисплее высветиться приветствие «HI» и тестер перейдет в режим ожидания выбора пользователем начальной длительности сигнала. Грубо говоря, от края или от середины диапазона. При нажатии на левую кнопку управление будет происходить от нуля, при нажатии на правую — от середины. После нажатия на одну из кнопок начнется генерирование сигнала, активным станет первый канал и он перейдет в режим «1».
В рабочем режиме кнопка MODE переключает режимы управления, меняя шаг приращения. Отображение текущего режима происходит при помощи шести светодиодов. Возможны четыре ручных режима (шаг 0,1; 1; 10 и от 0 до 150, то есть между краями диапазонов) и два автоматических (старт/стоп). Длительное нажатие на кнопку MODE переводит канал в режим автоматического управления и двигатель начинает плавно качаться из стороны в сторону. Короткое нажатие кнопки MODE в автоматическом режиме останавливает или возобновляет движения. Длинное нажатие на кнопку MODE возвращает канал в режим управления энкодером.
Кнопка CHANNEL производит переключение между активными каналами. Отображение текущего активного канала происходит на дисплее в двоичном коде при помощи разрядных точек. Длинное нажатие на эту кнопку переводит тестер в режим формирования одинаковых импульсов на всех каналах
Обратите внимание, что на индикаторе отображаются цифры от 0 до 150. Это примерно соответствует углу сервопривода и может быть пересчитано в длительность импульса. Для пересчета достаточно умножить показания на десять и прибавить 800. Например, если на индикаторе десять, значит длительность импульсов 900мкс.
Подключение к компьютеру
Если вы используете Raspberry Pi, то вы можете просто подключить Rx, Tx и GND в левой нижней части платы. Если у вас нет TTL-совместимого COM-порта в вашем компьютере, то вы можете использовать USB-COM-переходник, которые стоят очень дешево. Также вы можете взять напряжение 5В USB-порта, но помните, что его максимальный ток 500мА! Скорость подключения — 9600.
Для того, чтобы тестер загрузился в режиме управления от ПК необходимо включить его без перемычки. При этом на индикаторе отобразятся буквы «PC» и тестер перейдет в режим ожидания команд от ПК. До прихода первого полного пакета на всех каналах сигнал будет отсутствовать.
Значения длительности импульсов необходимо отправлять в микросекундах от 0 до 1500. То есть на каждый канал расходуется два байта.
Пакет данных должен состоять из 16ти байт: сначала два байта 0xFF для обозначения начала пакета, затем 12 байт длительностей импульсов для каждого канал и в конце два байта check-суммы. Check-сумма необходима для проверки корректности пакета и должна быть равна сумме всех длительностей.
1ый байт — 255 (0xFF)
2ой байт — 255 (0xFF)
3ий байт — старший байт первого канала
4ый байт — младший байт первого канала
5ий байт — старший байт второго канала
6ый байт — младший байт второго канала
7ий байт — старший байт третьего канала
8ый байт — младший байт третьего канала
9ий байт — старший байт четвертого канала
10ый байт — младший байт четвертого канала
11ий байт — старший байт пятого канала
12ый байт — младший байт пятого канала
13ий байт — старший байт шестого канала
14ый байт — младший байт шестого канала
15ый байт — старший байт check-суммы
16ый байт — младший байт check-суммы
Примеры корректных пакетов (в десятичной системе):
255 255 0 0 0 0 0 0 0 0 0 0 0 0 0 0 (все двигатели в начальное положение)
255 255 2 238 0 0 0 0 0 0 0 0 0 0 0 240 (первый двигатель в среднее положение)
255 255 2 238 2 238 2 238 2 238 2 238 2 238 17 148 (все двигатели в среднее положение)
Файлы для скачивания
Печатная плата
Прошивка
Модель для печати корпуса
И, уж извините, ссылка на основную статью на моем сайте.

