
Одним из основных мотивов робототехники является поиск ответа на вопрос, а можно ли это превратить в робота? С самого момента появления робототехники ученые не перестают создавать машины, которые по своему внешнему виду, функциям и даже поведению в той или иной степени схожи с животными. Мы видели роботов-собак, роботов-рыб, роботов-птиц и даже роботов-динозавров. Но, как и любая другая имитация, такие роботы не умеют всего того, что дано от природы их оригиналам. Ученые из Федеральной политехнической школы Лозанны (Швейцария) разработали крылатого робота, способного автономно приземляться на ветки, как это делают многие птицы. Какие сложности пришлось преодолеть инженерам для создания такого механизма, и насколько грациозный полет и посадка робота-летуна? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Разработкой летающих роботов занимаются уже достаточно давно. То же можно сказать и о роботах, связанных с различными методами приземления. Некоторые из них вдохновляются самолетами и вертолетами, другие же обращают свой взгляд на природу. Ранее мы уже рассматривали труд, в котором ученые также создали робота, способного приземляться на ветки, словно птица (А как же лапки: робот-птица, способный приземляться на ветки). Но тот робот был больше похож на обычный квадрокоптер с приделанными лапками и когтями, позволяющими ему цепляться за цилиндрические объекты.
А вот робот из рассматриваемого нами сегодня труда не оснащен вентиляторами, зато наделен крыльями, что наряду с когтями делает его еще более птицеподобным. Основным преимуществом крыльев по сравнению с винтами является бесшумность (относительная) полета, что позволяет, к примеру, ближе подлетать к диким животным для проведения наблюдений. Второй плюс — это безопасность. Плавно машущие крылья из мягких материалов могут нанести человеку или животному гораздо меньше вреда, чем быстро вращающиеся винты.
Но, если у робота есть крылья, то следующим этапом его развития должны быть когти, позволяющие садиться на ветки. А это уже гораздо сложнее сделать. Трудно моделируемая неустойчивая аэродинамика машущего крыла приводит к менее точному управлению и, следовательно, к менее точному позиционированию.
Небольшие птицы и роботы, способные парить, не столь подвержены этой проблеме, однако они страдают от ограниченной полезной нагрузки и повышенной сложности производства. С другой стороны, большие роботы с машущими крыльями и птицы не могут парить из-за неблагоприятного масштабирования, и поэтому им нужна скорость движения вперед, чтобы поддерживать полет и быть управляемыми. Следовательно, для приземления на ветку требуется метод захвата, способный остановить движущегося вперед крылатого робота. Это сложно из-за комбинированных требований высокой скорости срабатывания, точной синхронизации и высокой ударопрочности. Также ученые отмечают, что колебания высоты, вызванные взмахом крыла, должны компенсироваться хватательным аппаратом, который должен терпеть несоосность.
Кроме того, крупным (размах крыльев >1 м) орнитоптерам сложнее садиться. Прочность хватательного аппарата увеличивается с площадью поперечного сечения L2, но кинетическая энергия летательного аппарата увеличивается гораздо сильнее с L3v2. Отсюда следует, что Lv2 ∼1. Следовательно, чем больше робот, тем медленнее должна быть посадочная скорость, но v имеет более низкий предел, чтобы поддерживать полет. Кроме того, после приземления механизм захвата должен удерживать вес роботов. Вес масштабируется с L3, но сила захвата зависит от силы когтя, которая масштабируется с L2, что также ограничивает, насколько большими могут быть роботы.
Решений проблемы приземления для летающих роботов существует множество, и все они в тех или иных обстоятельствах работают весьма неплохо. Однако для роботов с подвижным крылом таких решений очень мало. Одним из успешных примеров является Robobee. Однако габариты и масса этого робота очень малы. Следовательно, для крупных роботов система посадки Robobee не будет эффективной.
Изображение №1
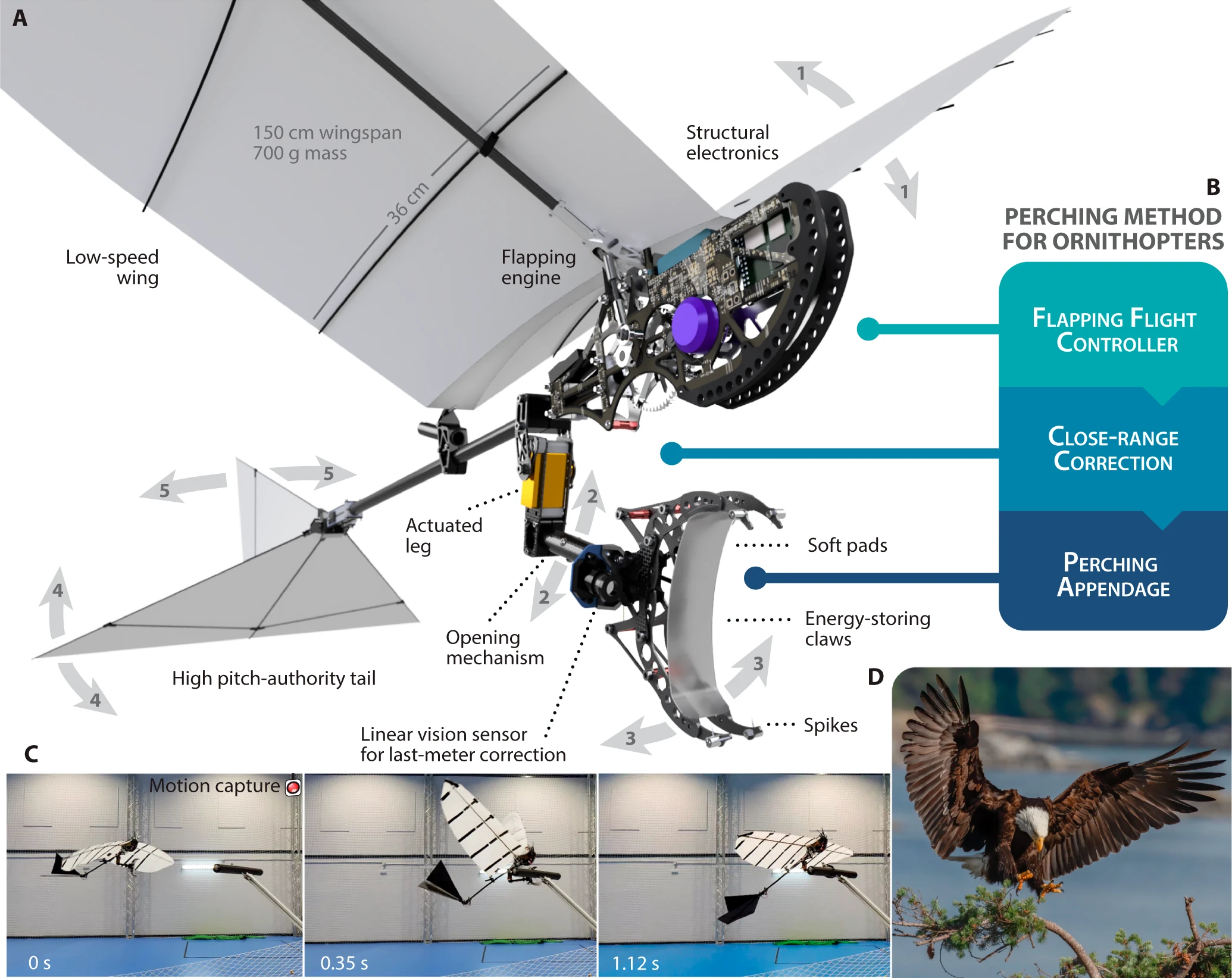
В рассматриваемом нами сегодня труде ученые представили новый метод реализации посадки летающего робота на жердочку, который заключается из трех основных составляющих: контроллер машущего полета, система коррекции приближения и пассивный аппарат захвата. На практике метод был проверен с помощью весьма габаритного робота с подвижным крылом (размах крыльев 1.5 м, масса 700 грамм; 1А). Во время полета манёвр приземления выполняется автономно с установлением положения посадки за счет системы захвата движения (1C). При этом робот способен действовать полностью автономно без участия человека.
Результаты исследования
Как говорят сами ученые, в настоящее время роботы с машущими крыльями — это лучшая попытка человека воспроизвести передвижение птиц, и поэтому логично изучить приземляющихся птиц (1D), чтобы понять этот сложный манёвр. Когда птицы приближаются к цели приземления, их тело наклоняется вверх, что резко снижает скорость полета. Затем они направляют свои вытянутые ноги вперед и разворачивают свои когти в сторону насеста, основываясь на визуальном восприятии, и точно позиционируют свое тело в течение расчетного времени для контакта. Птицы полагаются на набор когтей, приводимых в действие мощными мышцами, которые могут прилагать усилия, в 2.5 раза превышающие массу их тела. Их когти могут совершать сверхбыстрые хватательные движения (1 мс), что намекает на накопленную потенциальную энергию в их сухожилиях. Фиксация на ветке происходит благодаря высокому трению из-за жестких когтей и мягких подушечек пальцев. Эти наблюдения и стали основой для дальнейшего проектирования робота.
Во-первых, система управления полетом должна обеспечивать стабильный полет с дополнительной полезной нагрузкой и всей бортовой электроникой, необходимой для полета и приземления. Контроллер полета должен подвести робота достаточно близко к ветке, в пределах досягаемости корректирующей системы ближнего действия. Это возможно с помощью регулятора тангажа, рыскания и высоты. PCB, оснащенная компьютером, должна обеспечивать автономный полет и операцию посадки.
Во-вторых, клешня (когти) удерживается активно управляемой ногой, которая корректирует неточность вертикального положения, присущую полету с машущими крыльями, когда роботы приближаются к точке приземления. Обратная связь обеспечивается благодаря оптическому обнаружению ветки на высокой скорости, что приводит к срабатыванию системы коррекции ближнего действия.
В-третьих, когтеобразный аппарат механически приводится в действие самой веткой и должен позволять садиться со скоростью до 4 м/с. Механический аппарат робота должен быть в состоянии противостоять удару, быстро приближаться к ветке, прилагать достаточную силу, чтобы оставаться на месте, и, наконец, выдерживать возможные перекосы.
Первая реализация метода посадки привела к созданию орнитоптера P-Flap для робота с подвижными крыльями. Эта конструкция изначально основана на ранее существовавшем роботе E-Flap. Этот аппарат с машущим крылом обеспечивает стабильную скорость полета до 3 м/с, что возможно благодаря облегченной конструкции и малой нагрузке на крыло 16 Н/м2. Этот класс роботов достаточно габаритен, с размахом крыльев 150 см и массой пустого корпуса до 500 грамм.
Лапы, когти и клешня
Для приземления столь габаритного робота на ветку требуется хватательный аппарат, как уже было сказано выше. Этот механизм должен быть способен к быстрому срабатыванию в соответствующий момент и к приложению силы, достаточной для противодействия инерции вращения при приземлении и последующему дисбалансу. Система прямого привода постоянного тока не подходит с точки зрения дополнительной массы, что приведет к более высокому потреблению энергии во время полета и посадки.
Изображение №2
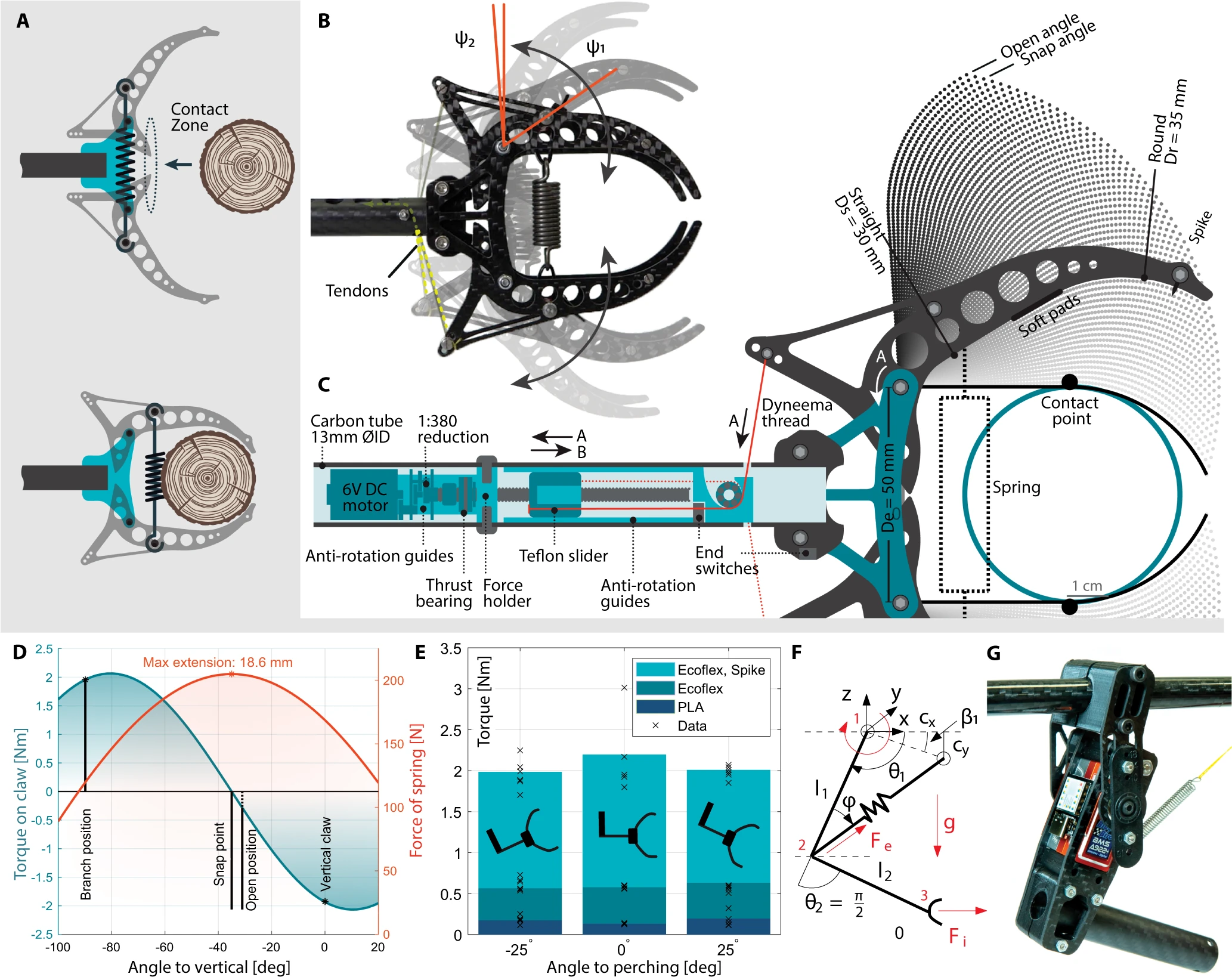
Ученые предложили новую конструкцию когтей, основанную на двойном ряду пластин из углеродного волокна, которые быстро смыкаются с веткой при контакте. За счет накопленной энергии есть возможность использовать как высокую скорость, так и большую силу. В то же время, эта конструкция захвата обеспечивает малую массу, возможность смягчения удара и самоблокировку благодаря бистабильной топологии (2А).
Коготь находится в открытом (верхнем) положении перед контактом с веткой. Это положение устойчиво с отрицательным ψ2 = -4°, т.е. начало пружины находится позади центров вращения. Угол ψ2 фиксируется конструкцией из углеродного волокна, упирающейся в держатель трубки и концевой переключатель. В открытом положении спусковыми крючками для срабатывания служат два выступа в центральной части захвата. Когда ветвь соприкасается с когтями, она может либо напрямую воздействовать на выступы, либо смещаться по центру и ударяться о край когтей. Во втором случае клешня будет скользить до тех пор, пока не коснется центрального выступа, что также приведет к ее закрытию. Когда когти поворачиваются внутрь ветви, пружина проходит вперед от центра вращения (2В), ускоряясь до тех пор, пока когти не коснутся ветки. Пружина здесь играет дополнительную функцию амортизатора, уменьшая нагрузку на боковые пластины из углеродного волокна. После полного закрытия клешня непрерывно прикладывает усилие в 56.8 Н к ветви в точке контакта.
Геометрия клешни смоделирована таким образом, чтобы обеспечить максимальное усилие зажима на уровне ветки, а также широкий угол раскрытия для захвата ветки и достаточно низкое усилие срабатывания для обеспечения надежного закрытия при контакте.
Линия контакта ветвь-клешня состоит из прямого сегмента Ds, за которым следует закругленный участок с радиусом Dr (2C). Эти значения оптимизированы для обеспечения точки контакта близко к центру вращения, увеличивая приложенную силу к ветви. Радиус Rc немного больше диаметра использованной в тестах ветки. Это гарантирует контакт и допускает возможность успешной посадки на ветки большего диаметра. Точки вращения двух захватов разнесены на расстояние De = 50 мм, устанавливая минимальный диаметр ветвей при контакте. Начало пружины в клешне рассчитано таким образом, чтобы максимальный крутящий момент клешни достигался при закрытии (2D). Максимально допустимое удлинение достигается в точке защелкивания, когда пружина проходит центр вращения захвата. В открытом положении крутящий момент когтя небольшой, менее 0.2 Нм. Это приводит к тому, что необходимая сила для высвобождения составляет 11.4 Н на конце контактной зоны, что значительно ниже сил, возникающих при контакте даже на низких скоростях.
Крутящий момент, который клешня может выдержать до проскальзывания, определяется материалами интерфейса и контактом между рамой из углеродного волокна и деревом. На 2E показаны результаты сравнения различных интерфейсов. Предполагается, что сочетание когтей с твердыми концами и мягких подушечек на пальцах обеспечит наибольшее трение. Ecoflex был использован для покрытия внутренней части когтей, соприкасающихся с веткой.
Как видно на 2C, идеальное расположение ветки касается оси цилиндра пружины, что приводит к перекрытию диаметра пружины. Это третья точка контакта когтя. Однако на самом деле пружина смещена влево. Преимущество этого заключается в постоянном приложении горизонтальной силы к когтям, улучшая сцепление за счет защемления.
Видео №1
Несмотря на то, что захват рассчитан на работу с ветками диаметром 6 см, он устойчив к отклонению от этого значения. В диапазоне 4–7 см блокирующая способность аналогична (в пределах 10%). Дальнейшее увеличение диаметра снижает усилие когтя на ветке, оставаясь эффективным до 11 см.
Хотя накопление механической энергии в пружине является легким методом для достижения сильного и быстрого захвата, для него требуется механизм повторного раскрытия, способный сначала нагружать коготь, а затем освобождать захват от ветки после того, как робот садится. В то время как закрытие клешни должно быть быстрым движением, повторное открытие может быть достаточно медленным. Таким образом, механизм быстрого сокращения особенно хорошо подходит для этой задачи.
Ученые решили интегрировать систему повторного раскрытия когтей в ногу робота (2C). Эта система привода работает в конфигурации с тянущим ходовым винтом и может тянуть с усилием до 200 Н. Раскрытие происходит в течение 20 с, при этом двигатель потребляет в среднем 3 Вт. После полного открытия (положение ψ2) концевой выключатель останавливает двигатель. Сухожилия расшатываются, но когти остаются в открытом положении благодаря бистабильному расположению (видео №2).
Видео №2
Нога робота приводится в действие для выполнения трех функций:
- компенсация несоосности для нивелирования неточностей и возмущений полета незадолго до приземления;
- возможность изменения позы робота сразу после манёвра усаживания, чтобы поддерживать вертикальное положение на ветке и предотвратить падение;
- поддержание равновесия после того, как робот окончательно сел на ветку.
Учитывая эти функциональные возможности, механизм ног должен соответствовать жестким ограничениям:
- размер и вес механизма должны соответствовать требованиям крылатых роботов;
- механизм должен иметь достаточную ударопрочность, чтобы выдерживать удар при приземлении и поглощать часть энергии;
- приведение в действие механизма должно быть настолько точным и быстрым, насколько этого требуют эти функции.
Центральный корпус механизма ноги состоит из двух параллельных наборов пластин из углеродного волокна. Между пластинами серводвигатель массой 34 г производит вращательное движение между телом орнитоптера и когтеобразным механизмом (2G). Диагональная пружина между трубкой ноги и корпусом робота накапливает энергию при ударе, уменьшая максимальное напряжение, которому подвергается механизм. Механизм активации ноги расположен под корпусом робота, так что нога вращается между 0° (вертикально вниз) и 90° (горизонтально), близко к центру тяжести.
Для расчета параметров была создана динамическая модель (2F), которая оценивала движение системы и напряжение в суставах для заданной ударной силы. Сочетание этой динамической модели и процесса оптимизации позволили получить наиболее подходящие параметры для механизма ноги в пределах логического диапазона.
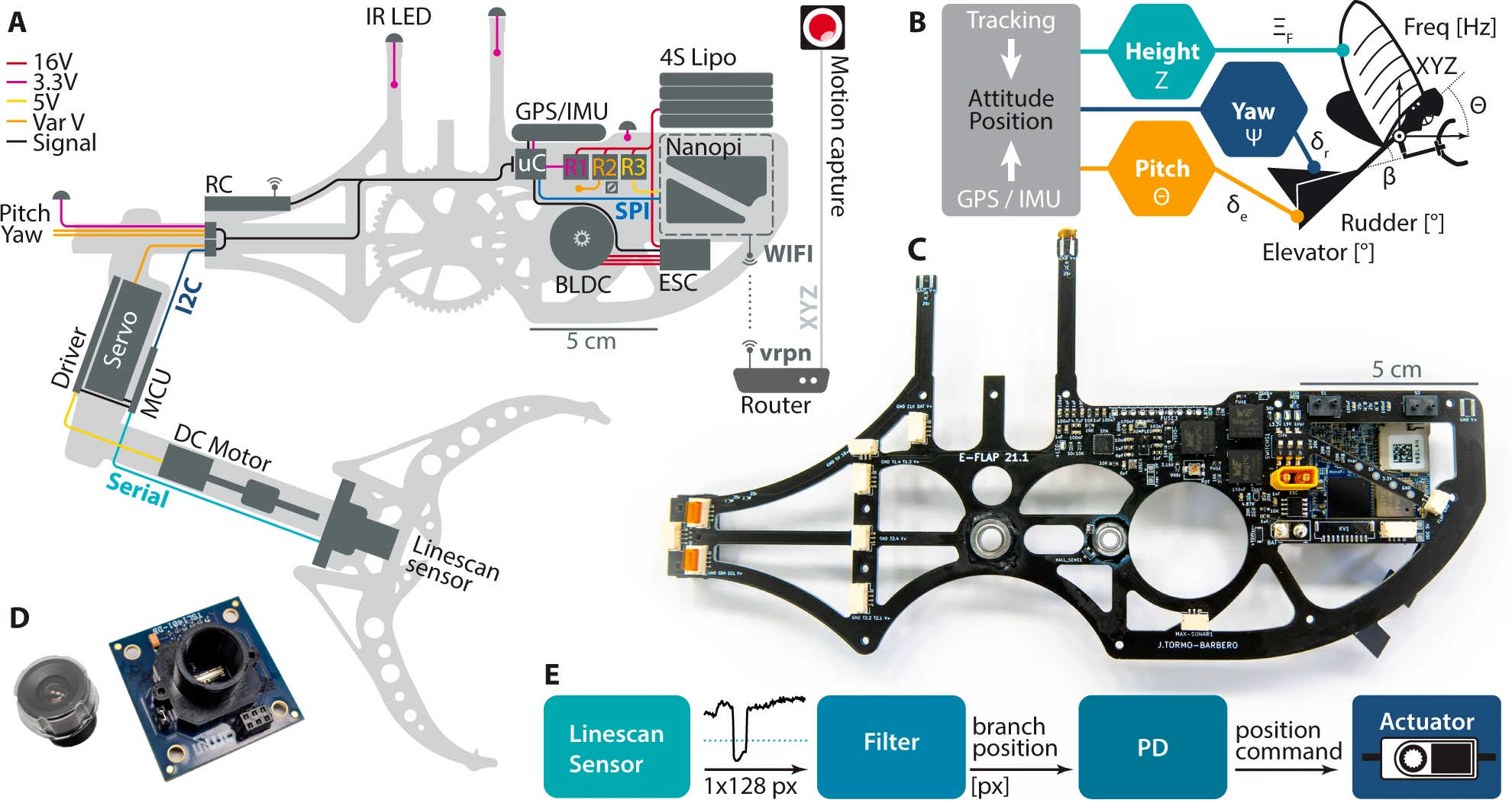
Зона механического контакта когтя составляет 5 см, что ниже точности высоты полета, ранее оцененной в ±10–15 см. Так как этого недостаточно для надежного приземления на цель, необходима коррекция. Нога робота сочленена на уровне колена, что позволяет когтям совершать полувертикальное движение. Когда робот приближается к ветке, нога обнаруживает это и компенсирует смещение. Относительное положение ветви определяется датчиком линейного сканирования (3D). Датчики этого класса основаны на однорядном массиве пикселей, который обеспечивает обнаружение на основе контраста. Улучшить систему обнаружения точки посадки можно в дальнейшем с помощью использования CMOS, к примеру.
Изображение №3
Как видно на 3E, показания фильтруются и определяются положения пиков. Пиковое смещение пикселя напрямую подается на пропорционально-дифференциальный (PD от proportional-derivative) контроллер для управления положением сервопривода, который перемещает коготь и датчик на нем, замыкая петлю. Таким образом, рассчитанное смещение ветви относительно когтя компенсируется механическим движением коленного сустава, что позволяет компенсировать неточности управления полетом.
Видео №3
Видео №4
Управление роботом
Для успешного полета робота с дальнейшим приземлением необходимо, чтобы конструкция тела робота была достаточно компакта с минимумом соединений и, как следствие, точек отказа (3C). Для этого была использована специально разработанная плата, которая располагалась таким образом, чтобы минимизировать длину необходимых кабелей.
Во время полета три параллельных контура управления работают в автопилоте с частотой 120 Гц, реализованном на C++. Тремя контролируемыми состояниями робота являются шаг (Θ), рыскание (Ψ) и высота (Z), которым соответствуют регуляторы δe, направления δr и частоты взмахов ΞF (3B). В фазе приближения, когда робот достаточно близок к ветке, активируется дополнительная цепь управления лапой-клешней, которая косвенно регулирует угол β на 3B.
Поскольку динамика полета робота сильно нелинейна для этого типа манёвра приземления, стратегия управления разработана специально, чтобы сделать ее возможной с помощью простых контуров обратной связи. Данная стратегия состояла из двух основных этапов: анализ огибающей полета для различных скоростей запуска посредством экспериментов; выбор подходящей траектории, при которой не возникают ограничения управления. Как отмечают ученые, данная система управления достаточно примитивна и в будущем будет улучшаться, дабы расширить спектр возможностей робота (т.е. возможно полета и приземления в более разнообразных условиях).
Экспериментальная часть
Изображение №4
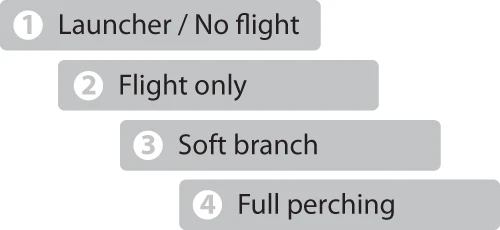
Ученые отмечают, что трехэтапная методика реализации робота с подвижным крылом, который способен приземляться на ветки, будет достаточно сложной на практике из-за высокой скорости манёвра (менее 4 с). Потому было предложено использовать 4 этапа процесса тестирования.
Во-первых, полет не рассматривался, а поступательная скорость задавалась пусковой установкой, что позволило детально изучить хватательный аппарат. Во-вторых, контроллер автопилота тестировался и настраивался в полете без учета ноги или клешни. В-третьих, затем добавляются нога и когти, а система коррекции ближнего действия проверяется с помощью мягкой ветки. В-четвертых, наконец можно проводить опыт полноценного приземления на реальную ветку.
Изображение №5
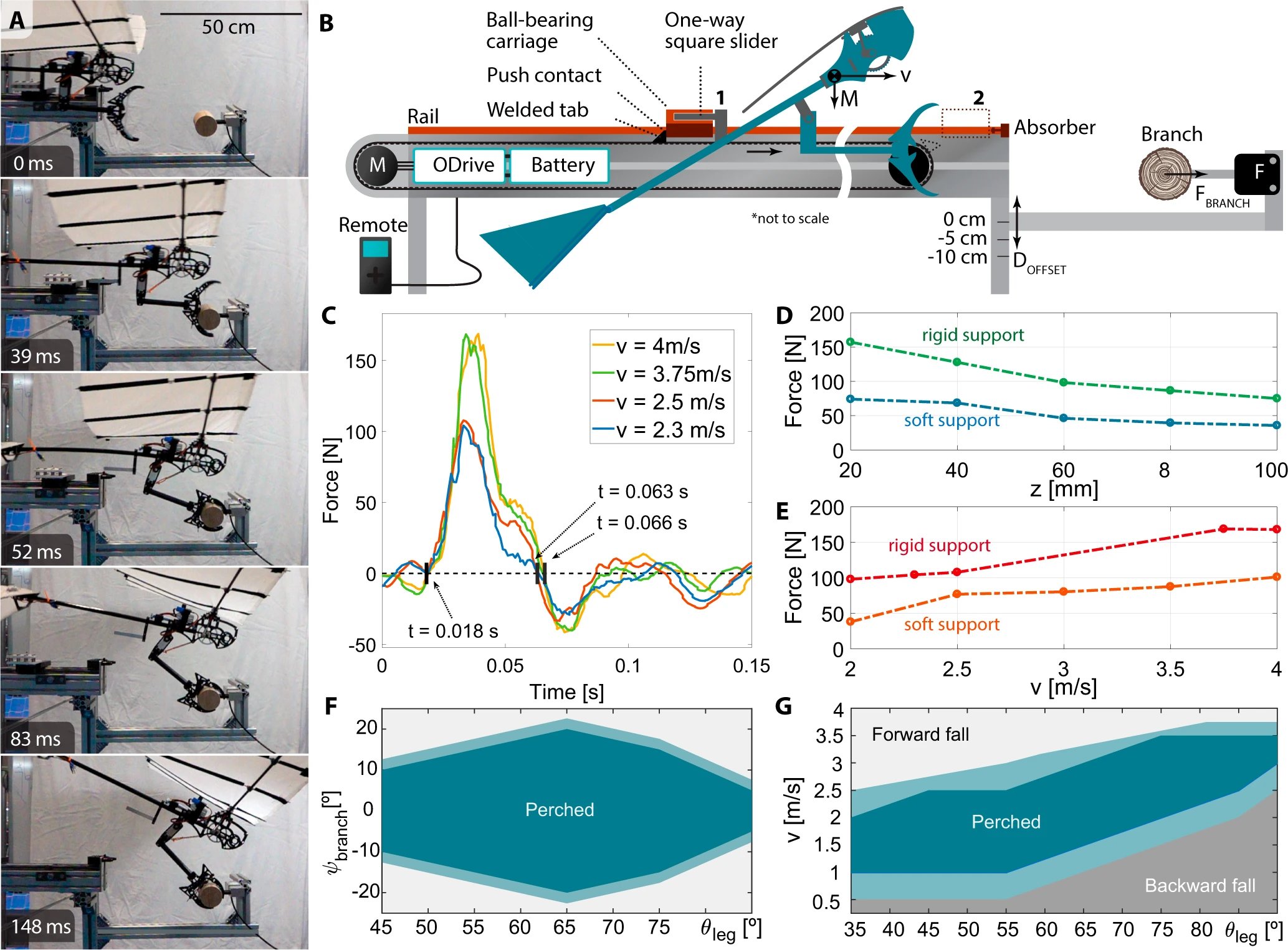
Для запуска робота в полет была создана специальная установка, с помощью которой можно было регулировать скорость (5B). Сначала были проведены эксперименты только с когтем, но с эквивалентной массой робота. Расстояние между клешней и веткой занимало 20 см. На ветке был установлен датчик силы. Геометрия когтя была проверена и оптимизирована посредством последовательных испытаний, пример которых показан на 5А.
В ходе опытов все испытания были успешны, а каких-либо структурных повреждений зафиксировано не было даже при скорости 4 м/с. Эксперименты показали, что клешня захватывает объект в течение 25 мс, что немного больше ожидаемых 20 мс. Испытания на удар (5C) показали, что время между началом удара и началом отскока составляет 50 мс (видео №5). Во всех опытах силы не превышали 150 Н (5D и 5E).
Видео №5
Ориентация шага ноги, скорость во время приземления и отклонение от курса между векторной скоростью и веткой при успешном приземлении — это три параметра, которые определяют условия, необходимые для успешной посадки. Эффект этих условий также проверялся экспериментально с помощью пусковой установки.
Угол тангажа робота был зафиксирован на уровне 30° во всех экспериментах, что сравнимо с углом тангажа, достигаемым в полете. На 5F показано влияние угла рыскания между вектором скорости и веткой на способность приземляться, когда робот достигает ветки, не будучи перпендикулярным ее оси. Результаты показали, что система может допускать отклонение ветки относительно рыскания в диапазоне ±10-20°, что также зависит от ориентации шага ноги, где 90° — горизонтальное положение. Таким образом, в случае небольшого отклонения угла рыскания от перпендикулярного направления клешня все еще может адекватно держаться за ветку при скорости приземления в 4 м/с.
На 5G показаны результаты анализа угла наклона ноги в зависимости от скорости удара. Увеличение скорости удара создает высокий угловой момент, который превосходит силу трения и приводит к падению вперед, тогда как более низкие скорости удара создают низкий угловой момент и большое смещение центра масс, что приводит к падению назад.
Изображение №6
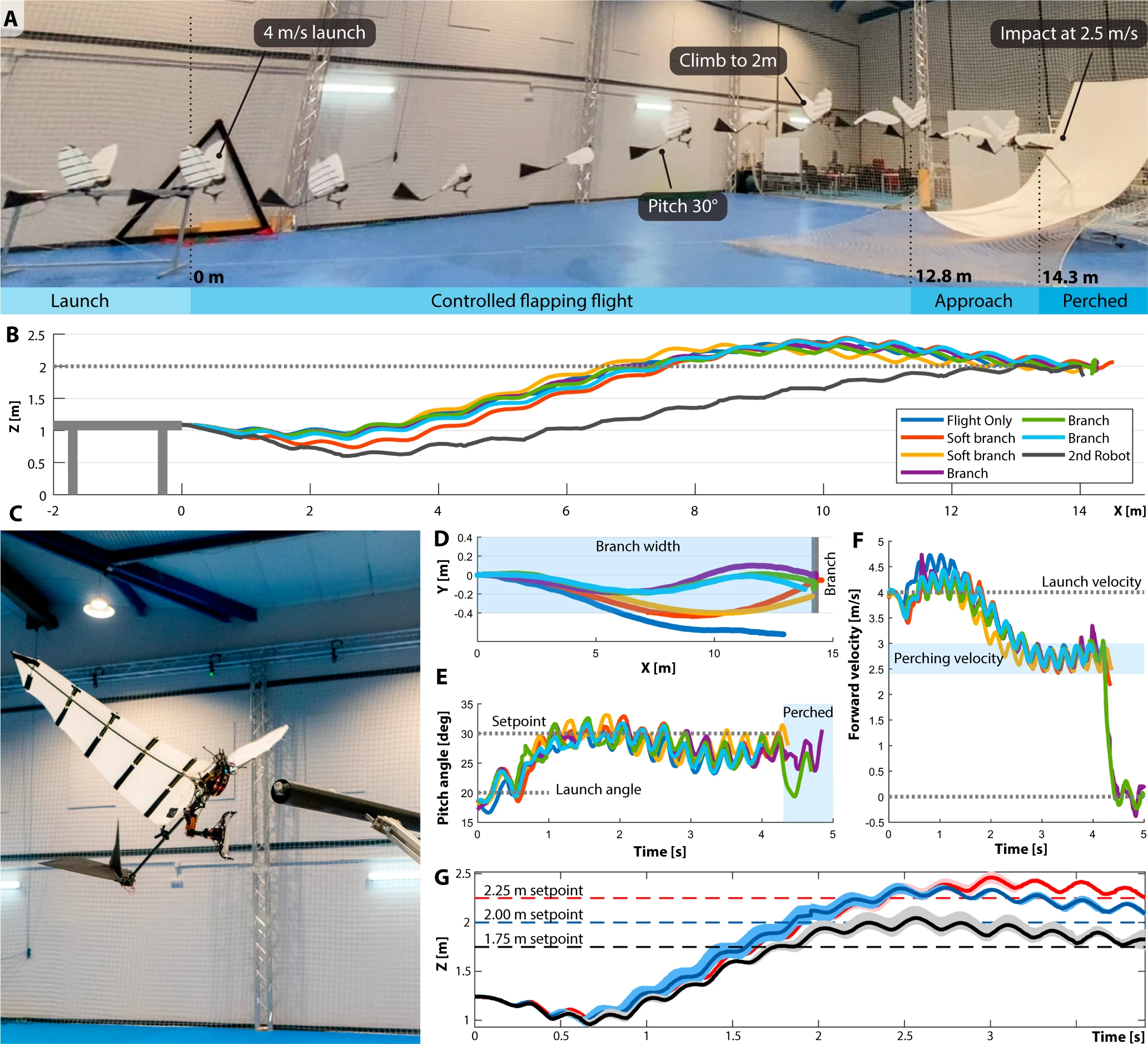
Далее ученые приступили к экспериментам, когда робот садился на ветку уже после полета на определенное расстояние. Данные опыты проводились в три этапа (6B). Первоначальные испытания (только полет) проводились без каких-либо веток, что позволило создать более безопасную среду для измерения летных характеристик, настройки полетного контроллера и проверки связи и электроники в полете. Последующие тесты проводились с мягкой веткой (видео №6).
Видео №6
На этом этапе черный пенопластовый цилиндр использовался в качестве посадочной точки (мягкая ветка). Это позволяло наблюдать и настраивать активную ногу в полете, избегая при этом сильных ударов и потенциальных повреждений.
Третий этап тестов проводился уже с реальной веткой (длиной 80 см, расстояние до ветки — 2 м), полетом и полноценной посадкой (видео №7 и №8)
Видео №7
Видео №8
Как отмечают ученые, скорость поступательного полета является ключевым параметром для удачной посадки. Она должно быть низкой, чтобы свести к минимуму силу удара и увеличить время реакции до удара. Для этого угол наклона робота должен быть высоким. По мере увеличения шага должна увеличиваться и частота взмахов крыла для поддержания высоты. Эксперименты показывают, что углы тангажа выше 40° приводят к недостаточной скорости и, как следствие, к потере поперечного контроля. Таким образом, угол тангажа 30 подходит для полетов с целью дальнейшего приземления.
На 6Е показано, что контроллер достигает целевого угла 30° в течение 1 секунды без значительной перенастройки и поддерживается на протяжении всего полета. Следовательно, когда шаг достигает 30°, скорость падает до 2.5–3 м/с. Эта скорость сохраняется до момента приземления, показанного на 6F.
Целевое значение высоты достигалось за счет управления тягой. Используя этот метод, все траектории полета достигали заданной высоты в 2 м на расстоянии в 8 м от точки запуска (6B, видео №9).
Видео №9
Видео №10
В точке положения ветки, т.е. X = 14 м, отклонение от заданного значения находится в пределах ± 10 см. Боковое отклонение, показанное на 6D, находились в пределах 0.6 м, редко превышая размер ветки 0.8 м (обозначен синим цветом). Контроллер полета отлично работал для разных высот положения веток (6G) с максимальной средней ошибкой 16 см.
Отклонения от эталонных значений Vx, ψ, θ, Y и Z во время посадки были невелики. Результаты шести экспериментов показали следующие изменения: Vx ~ 2.07–2.8 м/с; ψ ~ -8.3° до 4°; θ ~ 23.6° до 31.8°; Y ~ от -0.23 до 0.02 м и Z ~ 1.95 до 2.06 м. Следовательно, приземление находилось в пределах контрольных значений, а механизм захвата с активным управлением ногой компенсировал неточности и успешно противостоял ударам.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали робота, способного приземляться на ветки, словно птица. Основным отличием данного робота от ранее разработанных аналогов является наличие подвижного крыла, а не винтов или фиксированных крыльев.
Конечно, роботы с подвижным крылом не являются чем-то новым и уникальным. Чего стоит один только Robobee. Однако в этом труде тестировался робот, масса которого составляла 700 грамм, а размах крыльев был 1.5 метра. Другими словами, это гигант в мире крылатых роботов. Такие габариты, наличие крыльев и желание «научить» робота приземляться на ветки, как это делают птицы, диктует ряд условий, которые необходимо учесть для успешности всего мероприятия.
Во-первых, необходимо было рассчитать оптимальную скорость полета в момент, когда робот пытается приземлиться. Если этот показатель будет слишком велик, то стабильность робота будет нарушена и он начнет падать вперед, если же слишком мал — падать назад. Во-вторых, когти робота должны были быть достаточно мощными, чтобы успешно ухватиться за ветку и удержать массу корпуса. Как отмечают ученые, по этой причине они и решили сделать своего робота одноногим, т.е. использовать всего одну ногу, оснащенную клешней с когтями.
Немаловажным аспектом было управление полетом и приземлением. На этом этапе в игру вступали не только электронные системы контроля и считывания визуальной информации для определения положения ветки, но и механические особенности ноги робота. Откалиброванные элементы ноги с клешней позволяли роботу не только компенсировать возможные колебания, но и поглощать импульс, возникающий во время контакта с веткой на определенной скорости.
Несмотря на успешность практических испытаний, авторы разработки отзываются о своем детище достаточно скромно, говоря о необходимости проведения множества совершенствований для достижения идеального результата. По их мнению, такие роботы могут стать очень полезны для проведения наблюдений за, к примеру, дикими животными.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?

