
Птицы, покорившие небеса задолго до человека, стали вдохновением для создания первых летательных аппаратов, пытающихся в своей механической и электронной ограниченности имитировать врожденный талант пернатых летунов. однако, помимо фактического пребывания в воздухе к полету птиц относятся еще несколько немаловажных составляющих, а именно взлет и посадка. Взлетают разные виды по-разному, одни могут взмыть в небо буквально с одной точки (воробьи, например), другим нужен разгон (лебеди, например). В мире технологий подобные варианты взлета отображаются в виде самолетов и вертолетов. Но вот посадка стальных птиц разительно отличается от посадки пернатых. Многие птицы способны приземляться не только на плоскую поверхность, но и на разного рода ветки, провода, жердочки и т.д. Другими словами, они пускают в ход свои лапки и коготки, чтобы в момент контакта с посадочной «площадкой» зафиксировать положение тела. Ученые из Стэнфордского университета (США) решили проанализировать динамику этого метода посадки и воссоздать его в роботизированном виде. Какими нюансами обладает посадка птиц на ветки, как выглядел созданный учеными робот, и смог ли он сымитировать птицу? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Глядя на птиц, первое, что мы замечаем, это их умение летать (как бы очевидно это не звучало). Но помимо этого они прекрасно умеют справляться с посадками на самые разные поверхности. При этом то, как устроены лапы и когти разных видов птиц, обусловлено их местом обитания, повадками и даже гастрономическими предпочтениями.
Для примера возьмем буйволовых скворцов (Buphagus), лебедей (Cygnus) и виргинских филинов (Bubo virginianus). Обитают эти виды в разных условиях, питаются разной пищей, да и внешне разительно отличаются.
Обитающие в Африке скворцы называются буйволовыми, так как их куда проще увидеть на теле буйвола (жирафа, носорога или слона), чем на какой-то ветке. Для крупных копытных эти маленькие птички (длина — 20 см; масса — 50 грамм) являются важными помощниками, так как они избавляют их от паразитирующих на коже насекомых.

Буйволовый скворец на боку зебры.
Учитывая, что скворцам этого вида постоянно приходится цепляться за тело животного, их лапки имеют специальную морфологию: три пальца направлены вперед, а четвертый направлен назад и оснащен длинным когтем. Такая конструкция позволяет цепляться за отвесные поверхности.
Филины, всем своим видом показывающие, что с ними лучше не шутить, обитают в Северной и Южной Америке. Габариты филина делают его одним из более крупных представителей совиных: длина — более 60 см; размах крыльев — 150 см; масса — около 1.8 кг. Как и многие другие совы, виргинский филин обладает отличным слухом, что позволяет ему охотиться. Меню этого хищника весьма разнообразно и насчитывает порядка 250 видов животных, но большую долю диеты составляют грызуны.
Хоть у сов (в том числе и виргинских филинов) когти не такие больше, как у ястребиных, но их сила по отношению к размерам тела значительно выше. Ястребиные используют когти для проникающих ранений добычи и повреждения органов несчастной. А вот совы хватают жертву и сжимают ее. Хватка виргинского филина достигает 54 кг/см2. У самок виргинского филина этот показатель может порой сравниться с оным у куда более крупной птицы, а именно беркута (длина — 93 см, размах — 240 см, масса — около 5 кг).

Виргинский филин во всей своей красе.
Во время атаки, будучи в сантиметрах от добычи, филин раскрывает свои когти и хватает добычу. Расстояние между когтями, когда они полностью раскрыты, достигает 20 см. При этом виргинский филин силен не только в когтях, ибо может поднять в воздух массу, в 4 раза превышающую его собственную.
В отличие от сов, лебеди не охотятся на крупную дичь (если не считать атаки разъяренных лебедей на незадачливых фотографов). Питаются лебеди водной растительностью и личинками насекомых, для чего успешно применяют свою длинную шею. Они погружают голову в воду и роются клювом в дне водоема. Габариты лебедей варьируются от вида к виду: длина — около 1.5 м; размах крыльев — 1.5-3 м; масса — 12-15 кг).
Если сов ассоциируют с мудростью, ввиду их внешнего вида, но лебедей считают символами грациозности. Когда эти птицы находятся на суше, с этим утверждением можно поспорить, ибо их лапки довольно короткие по отношению к размерам тела. Однако на воде они действительно чувствуют себя уверенно. Предпочитая большую часть времени находиться именно на воде или около нее, вполне очевидно, что лапки этой птицы оснащены не длинными когтями (они есть, но маленькие), а перепонками, позволяющими перемещаться по водной поверхности. Кроме этого они помогают лебедям в момент посадки, выполняя роль своеобразных «шасси», которыми они скользят по воде в момент приземления, уменьшая тем самым свою скорость. К слову, гидросамолеты приземляются по подобному принципу.
Приземление на воду в исполнении лебедя.
Итого, три разные птицы, три разные формы лап и когтей. Все эти отличия обусловлены особенностями места обитания, повадками и питанием птицы. Как уже было сказано ранее, птицы всегда вдохновляли ученых и инженеров на создание летательных аппаратов. И гидропланы, приземляющиеся на воду как лебеди, тому яркое подтверждение.
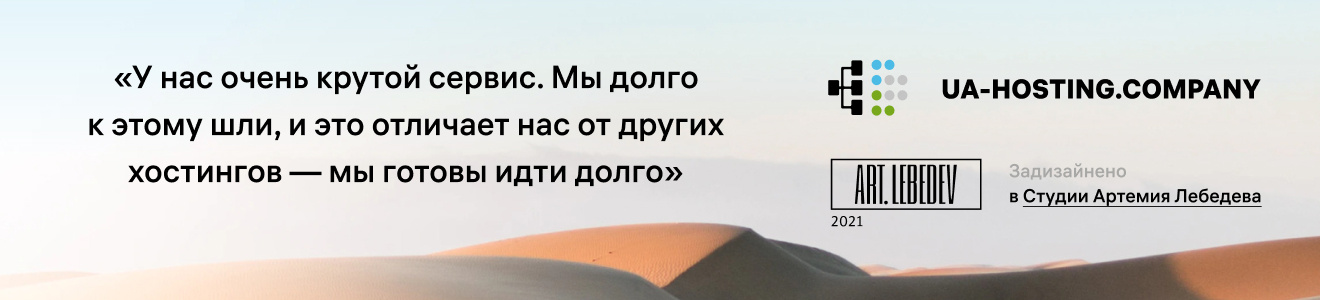
Факт того, с какой легкостью многие птицы способны приземляться на ветки и провода, интересует ученых уже давно. А потому нет ничего удивительного в том, что было проведено немало исследований и опытов, нацеленных на расшифровку всех нюансов взлета и посадки птиц, способных на такое (1A).
Изображение №1
Исследования приземляющихся птиц показывают, что птицы при приземлении следуют стратегии управления, основанной на времени контакта, которая называется теорией Тау ("General tau theory").
Основным параметром этой теории является τ — время контакта с текущей скоростью птицы. Было показано, что приземляющиеся птицы поддерживают постоянную скорость изменения τ, чтобы совершить управляемое столкновение с веткой. Во время приземления птицы наклоняют тело вверх и при приближении к ветке вытягивают ноги и ступни. После контакта с поверхностью ноги поглощают инерцию. А ступни в этот момент работают с поверхностью точки приземления, охватывая и сжимая ветку когтями. Наконец, птицы балансируют на ветке и при необходимости корректируют положение тела.
Ученые отмечают, что современные летающие роботы, оснащенные некими устройствами захвата, значительно уступают в своей функциональности птицам и их когтям. Многие из имеющихся на данный момент роботов способны приземляться на нетипичной поверхности, но только на какого-то одного типа. Другими словами, им недостает универсальности птиц.
Посему ученые, используя данные по динамике приземления птиц из предыдущих исследований ("Birds land reliably on complex surfaces by adapting their foot-surface interactions upon contact"), создали SNAG (stereotyped nature-inspired aerial grasper) — искусственный эквивалент птичьих лап и когтей, использующий для приземления те же принципы и механизмы, что и сами птицы (1D).
Описание робота
SNAG представляет собой две ноги и ступни, имитирующие таковые у птиц (изображение №1). Он установлен на квадрокоптере, управляющий его полетом. Все детали конструкции были созданы с помощью 3D-печати. Подобно некоторым хищным птицам, SNAG также может динамически ловить и переносить объекты (1C), используя те же искусственные лапы, что для обычной посадки.
Ученые признаются, что первые варианты конструкции основывались на более традиционных инженерных решениях, которые оказались неэффективными. Лишь на 20 попытке, которая больше всего походила на лапы реальной птицы, удалось достичь такого же приземления, как и у птиц.

Изображение №2
Главным источником вдохновения для создания SNAG, как не удивительно, стали лапы птицы (2A и 2B), но не только с визуальной точки зрения, но и с анатомической. Жесткие структуры лап птицы состоят из костей и хрящей, связанных между собой связками и мышцами, которые приводят их в действие через сухожильные соединения.
Точно так же жесткие конструкции робота сделаны из твердого пластика, а захват осуществляется с помощью связок Spectra с настроенными пружинами, последовательно приводимыми в действие двигателем (по 1 на каждую лапу). Размеры лап, пальцев и когтей робота были масштабированы относительно габаритов природного прототипа Falco peregrinus (сапсан). Захватывающий механизм SNAG с его электроникой имеет массу около 250 г. Каждая нога весит около 50 г, т.е. 6.7% от массы квадрокоптера в полете.
Поскольку бедра птицы имеют тенденцию всегда оставаться близко к телу во время приземления и ловли, конструкция ног робота был упрощена так, что они напоминали участок лапы птицы от колена до ступни. Следовательно, самый проксимальный сустав робота будет называться бедром, а не коленом (2B).
Секция захватного механизма, жестко соединенная с корпусом, оснащена двумя приводами на каждую ногу. Эта конструкция соответствует тому факту, что основные хватательные мышцы лап птицы расположены проксимальнее, чем ступни. Эти мышцы расположены выше лодыжки и связаны с пальцами ног посредством сухожилий. На роботе серводвигатель в бедре ориентирует ногу в сагиттальной плоскости на целевую ветку (точку посадки) или целевой объект (для его захвата и подъема), а также уравновешивает центр тяжести робота во время приземления. Второй двигатель накапливает энергию в пружине, которая высвобождается при ударе о предмет (2C). Быстрое высвобождение происходит механически через сухожилие, когда нога сжимается (складывается).
Двигатель стопы может изменить направление, чтобы восстановить и перезагрузить ногу и ступню в положение покоя. Также он не вращается, потому может пассивно удерживать силу захвата.
Ноги робота состоят из верхнего и нижнего параллельных механизмов, которые призматически складываются (2A и 2B). Сухожилие, сгибающее пальцы ног, последовательно проходит через ногу с пружиной.
Ноги робота включают в себя два ключевых внутренних механизма, обнаруженных во многих птичьих лапах, которые, как предполагается, улучшают захват: цифровой сгибающий механизм (DFM от digital flexor mechanism) и механизм фиксации сухожилий (TLM от tendon locking mechanism) (2A и 2D). В DFM некоторые из сухожилий, сгибающих пальцы ног, проходят вокруг лодыжки, так что эти сухожилия натягиваются, когда нога сгибается в лодыжке.
Хотя было показано, что этого механизма недостаточно для активации автоматического пассивного приземления или пассивного сгибания пальцев ног, он все же может быть механически полезен для птиц, поскольку создает некоторое начальное растяжение в мышце, которое может способствовать эффективному сокращению.
Разводка сухожилия вокруг лодыжки в роботе, позволяет SNAG механически воплотить принципы DFM для поглощения энергии удара, когда складывающаяся нога растягивает сухожилие к ступням, и для преобразования энергии удара в силу сжатия.
Важно отметить, что пассивное поглощение импульса удара с помощью растяжения сухожильной пружины позволяет захватному механизму прикладывать большее усилие захвата, чем могли бы обеспечить приводы сами по себе.
Что касается TLM у птиц, то сухожилия, проходящие через каждый палец ноги, взаимодействуют с фиксирующими элементами в связанных с ними сухожилиями. Таким образом, когда стопа активно закрывается, эти особенности могут зафиксировать палец на поверхности. SNAG включает аналог TLM с храповым механизмом с фиксатором в голеностопном суставе. Этот механизм позволяет SNAG поддерживать дополнительную силу захвата от DFM, когда нога складывается, предотвращая упругий отскок.
Когда двигатель стопы сбрасывает механизм для взлета, храповой механизм разблокируется, позволяя ноге вернуться в исходное положение.
Подобно птицам, лапы SNAG оснащены суставными пальцами, приводимыми в движение сухожилиями, с подушечками для трения и когтями для цепляния за неровные поверхности (2E). Когти также напечатаны на 3D-принтере и имеют ту же форму и габариты, как и у сапсана. Чтобы задействовать все пальцы стопы одним сухожилием ноги, сухожильный дифференциал соединяет каждый коготь, распределяя нагрузку поровну между пальцами ноги. Подобно механизму, по которому птицам приходится вытягивать когти, эластичные ленты за суставами пассивно растягивают пальцы ног, когда мотор стопы расслабляет основное сухожилие.
Процесс приземления на жердочку начинается, когда двигатели бедра поворачивают ноги к заданной точки приземления, а двигатели стоп активируются, чтобы накопить энергии в своих основных пружинах (2F). Когда робот ударяется о поверхность, ноги начинают складываться. DFM поглощает энергию полета робота и пассивно преобразует ее в силу захвата, которая заставляет пальцы ног охватить поверхность.
Одновременно с этим спусковой механизм срабатывает и высвобождает накопленную энергию для усиления сил, сгибающих пальцы ног, которые на высокой скорости (за 50 мс) приспосабливаются к поверхности. Когда нога сжимается, TLM с храповым механизмом пассивно фиксирует положение ноги.
Во время приземления акселерометр на правой ступне заставляет ногу начать балансировку вскоре после контакта, что достигается за счет активного вращения тела вокруг бедра. Акселерометр определяет угол наклона ступни относительно направления силы тяжести, что, как мы обнаружили, является хорошим показателем угла ступни на жердочке.
Для взлета, инициированного полетным контроллером, нога переориентируется, чтобы направить квадрокоптер в стабильную полетную ориентацию, а мотор ступни меняет направление, чтобы разблокировать лодыжку, перегрузить спусковой механизм и обеспечить расслабление пальцев ног в течение примерно 20 с.
Во время взлета SNAG полагается на свои роторы, чтобы оттолкнуться от поверхности, аналогично тому, как колибри в значительной степени полагаются на свои крылья, чтобы сдвинуться с места.
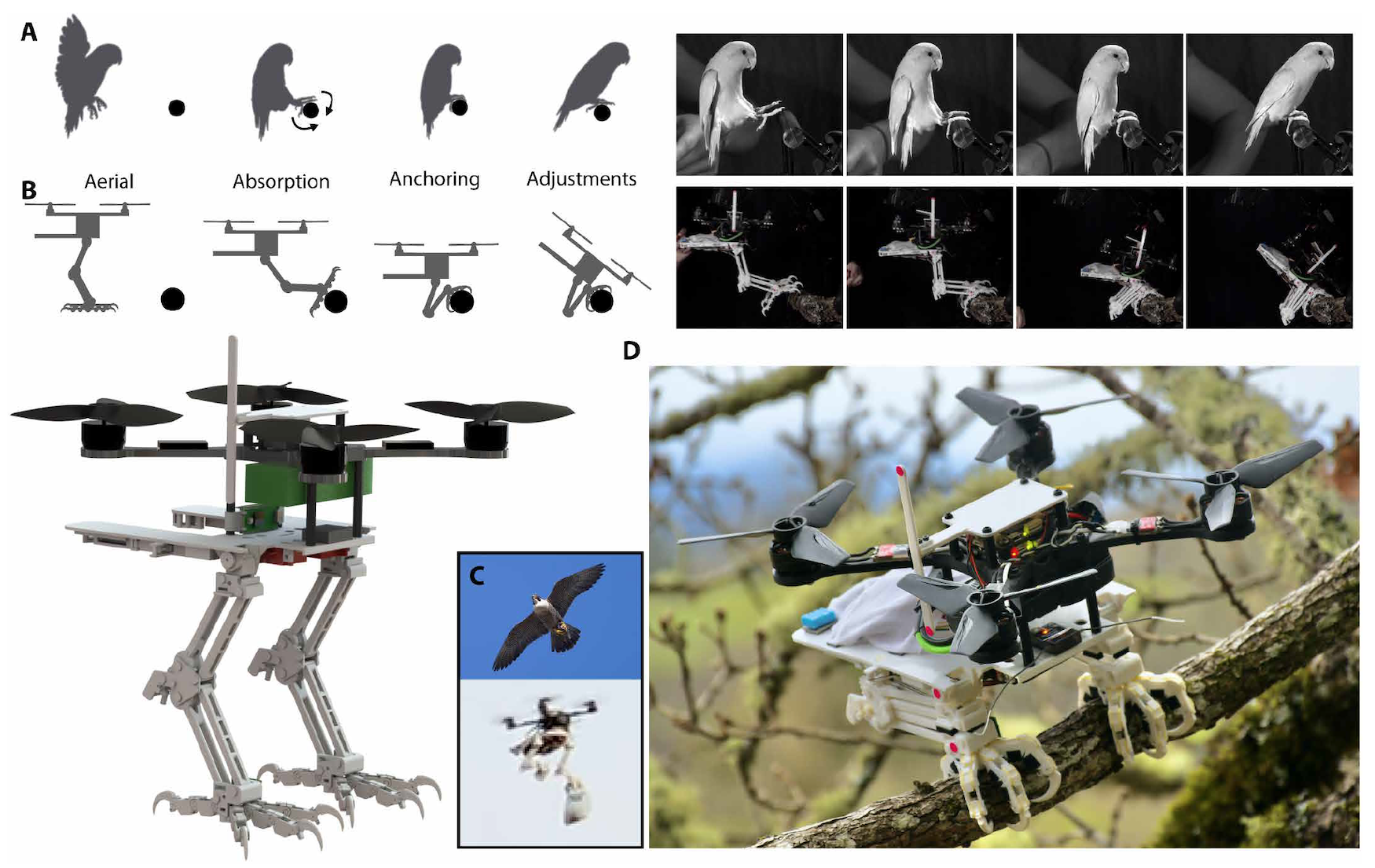
Авторы разработки отмечают, что во время посадки птицы должны сохранять определенный баланс между затрачиваемой энергией и результатом. К примеру, при слишком большой скорости посадки птица может травмироваться, но при слишком низкой скорости увеличивается вероятность негативного воздействия воздушных потоков, что увеличивает продолжительность процесса.
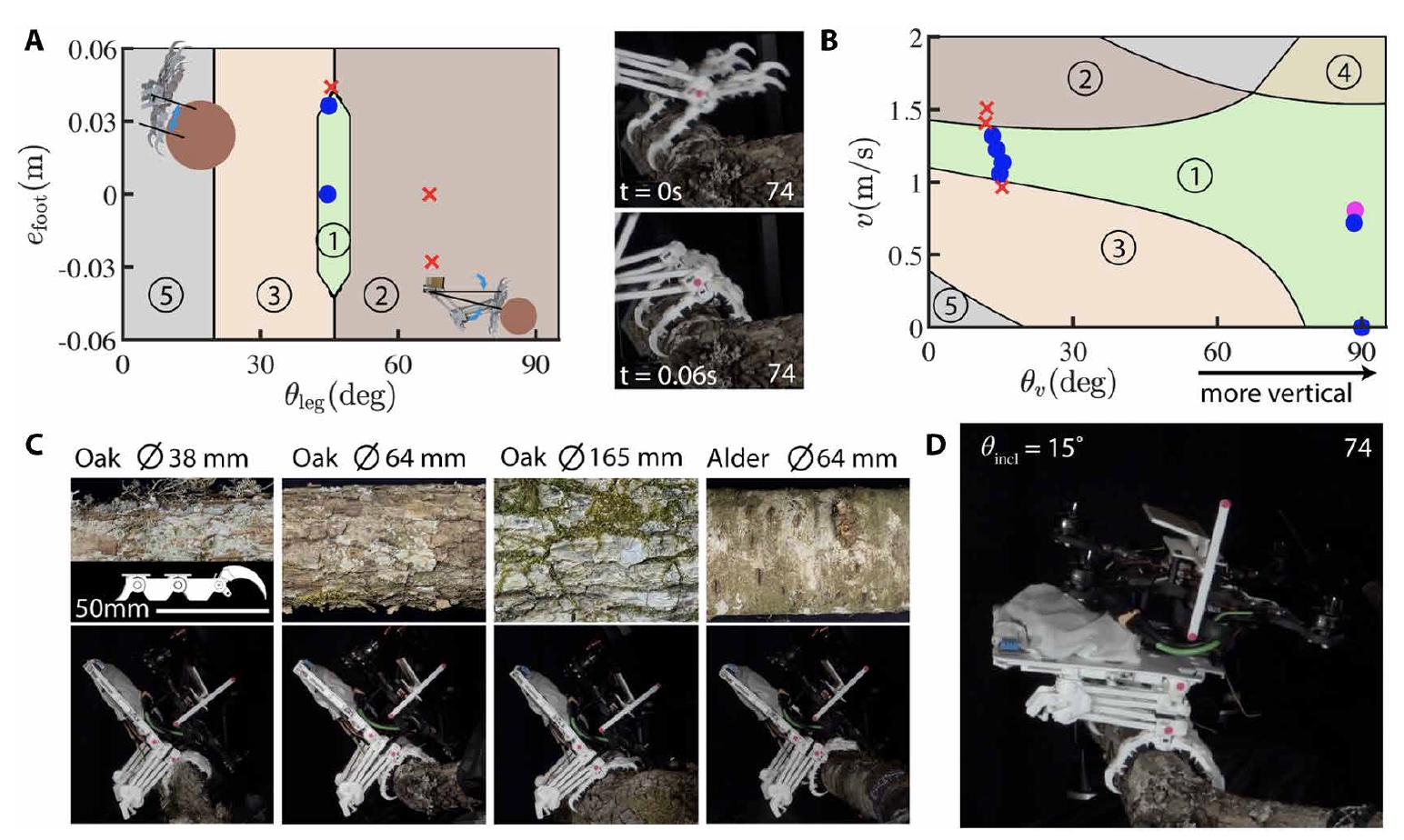
Другими словами, во время приземления птицы или робота успешность сего процесса определяется целым набором параметров: конструкция робота, кинематика, особенности поверхности и поведение балансировки после контакта (3A). Кинематические переменные включают скорость контакта, угол наклона туловища и ноги, а также угол и место, в котором ступня касается ветки.
Изображение №3
К параметрам оборудования относятся размеры и масса, а также способ поглощения энергии ногами. Птицы, схватившись за жердочку, используют ступни и ноги, чтобы отрегулировать опору и контролировать центр масс для достижения и поддержания равновесия. Для этого робот SNAG использует подвижный тазобедренный сустав, но он не может регулировать свою опору, как это делают птицы.
Учитывая, что все перечисленные параметры связаны друг с другом, корректировка одного из них может компенсировать недостачу другого. Следовательно, успешность приземления роботом зависит от динамики его тела, аппаратного обеспечения, поведения робота и состояния контактной поверхности.
Ученые отмечают, что формулировка «успешная посадка» сильно зависит от контекста. Например, некоторые птицы и летучие мыши могут садиться на жердочки вверх ногами. Во время пилотных испытаний с ветками малого диаметра наблюдалось, что SNAG также может успешно оставаться прикрепленным к жердочке, раскачиваясь под ней, как летучая мышь. Однако основной упор в исследовании все же сделан в сторону птиц, а не летучих мышей. Потому успешная посадка робота определяется как таковая, при которой центр масс робота остается выше центра жердочки, как у большинства птиц.
Согласно этому определению, незначительное скольжение по поверхности допустимо и может быть полезным для рассеивания энергии и стохастического поиска лучших неровностей по мере того, как когти контактируют с поверхностью. В такой ситуации существуют ограничения на кинематические параметры, которые приведут к успешной посадке, такие как ограничения на величину скорости и угла приземления (3B).
Как правило, области пространства состояний которые удовлетворяют кинематическим и скоростным ограничениям для успешного приземления, называются зонами посадки (посадочные конверты). Это понятие можно расширить, включив в него дополнительные параметры, в том числе и поведение балансировки робота. Такие параметры называются областью достаточности, определяемой как многомерное пространство всех переменных, которые приводят к успешному приземлению на ветку (3C).
Дабы проверить работоспособность SNAG, было проведено несколько практических испытаний (4A).

Изображение №4
Ученые отмечают, что у птиц разного вида пальцы ног имеют разное расположение, зависящее от образа жизни и ареала обитания. Двумя наиболее распространенными конфигурациями (4B) являются анизодактиль (3 пальца спереди и 1 палец сзади) и зигодактиль (2 пальца спереди и 2 пальца сзади). Оба варианта позволяют птицам успешно приземляться на ветках и проводах, но пока не было исследований того, какая из конфигураций более эффективная.
Посему ученые решили провести собственное сравнение, проанализировав приземления SNAG на разных скоростях с анизодактильными и зигодактильными конструкциями стопы (4B и 4C). Изначально предполагалось, что большее количество пальцев на одной стороне поможет справиться с угловым моментом в противоположном направлении. Однако анализ опытов показал, что особых отличий на самом деле нет.
Ноги робота играют не менее важную роль в успешности приземления. К примеру, если натяжение сухожилий слишком велико, ноги не будут полностью складываться (4D). Если же натяжение слишком слабое, то при полном складывании ноги будут поглощать слишком мало энергии полета. Это приведет к тому, что робот будет контактировать с веткой на слишком большой скорости.
Кроме того, неправильный дизайн ноги и ступни может привести к соскоку с ветки, который наблюдался в некоторых из более ранних прототипов SNAG (4E).
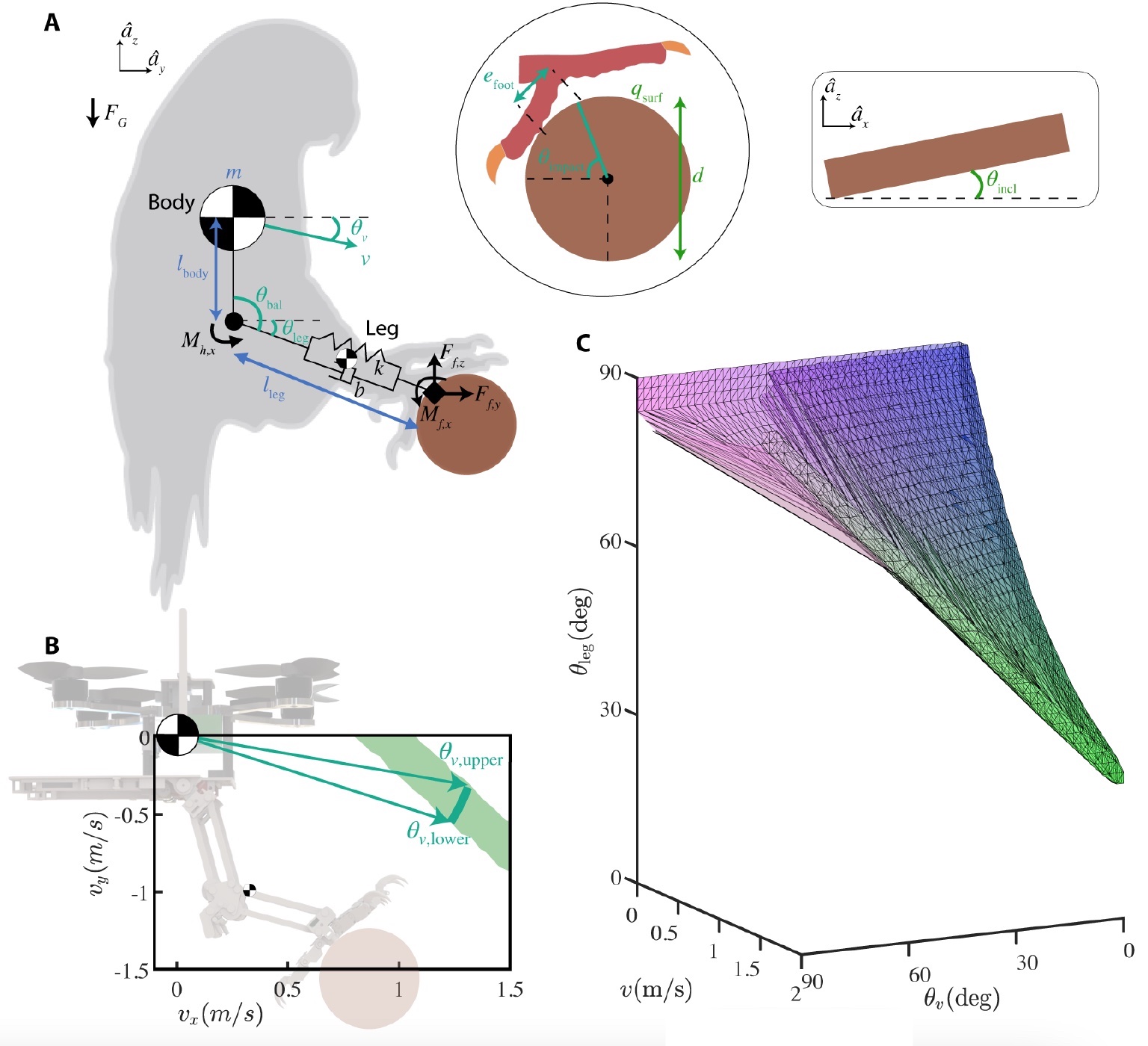
Балансировка в момент приземления также была важна для ее успешности. Чтобы экспериментально оценить влияние различных стратегий балансировки, были проведены тесты в режиме с фиксированным углом ног (5A и 5B) или в режиме открытого/закрытого цикла. Алгоритм фиксированного угла ноги влечет за собой задание постоянного угла баланса по отношению к ноге. Это требует, чтобы стопа удерживала относительно большие моменты наклона назад для успешного приземления.
Изображение №5
Алгоритм замкнутого цикла работает следующим образом: после задержки (пока нога складывается) робот дает команду своему центру массы переместиться к вершине ветки, используя обратную связь от акселерометра на его правой ноге.
Поведение без обратной связи функционирует аналогично алгоритму с обратной связью, но с одной модификацией: алгоритм задает постоянный угол балансировки, эквивалентный тому, что можно было бы ожидать в случае замкнутого контура, если бы ступня сохраняла ту же ориентацию, что и при контакте с веткой.
В ходе опытов было обнаружено, что SNAG в режиме с фиксированным углом не мог успешно приземлиться, постоянно падая назад. А вот в режимах с открытым и закрытым циклами приземления были одинаково успешны (6B).
Изображение №6
Далее ученые решили провести опыты, используя конфигурацию лап и пальцев сапсана (т.е. 3 спереди и 1 сзади), дабы изучить влияние ориентации ног и положения стопы на успешность приземления.
При первом контакте ступни с поверхностью есть три основных параметра, которые влияют на выполнение посадки: угол ноги, угол удара (контакта) и смещение ступни (3A).
Если смещение ступни слишком велико, пальцы ног будут слишком сильно сгибаться, прежде чем коснуться ветки, что приведет к неудачной посадке (6А). Большие углы ног и углы удара приведут к большему угловому моменту над центром ветки. Если угловой момент слишком велик, то робот не сможет успешно приземлиться.
Кроме того, величина и направление скорости робота также влияют на успешность посадки. Если робот приближается к ветке с небольшими углами скорости, то он нарушает ограничения углового момента и не может приземлиться. Слишком низкая скорость также может привести к тому, что ноги не сложатся полностью, а это увеличивает момент тангажа и может привести к поломке.
В дополнение к параметрам, которые по большей степени описывают робота, немаловажную роль играют и параметры посадочной зоны, т.е. веток (6C).
Было протестировано три диаметра ветки дуба: 38 мм — пальцы полностью обхватывают ветку; 64 мм — обхват примерно половины ветки и 165 мм — обхват менее четверти ветки. Во всех опытах робот SNAG продемонстрировал успешное приземление. Дополнительные тесты с ветками такого же диаметра, но из ольхи (т.к. ее кора более гладкая) показали аналогичные результаты. Изменение наклона ветки не имело особого влияния на успешность посадки (6D).
Изображение №7
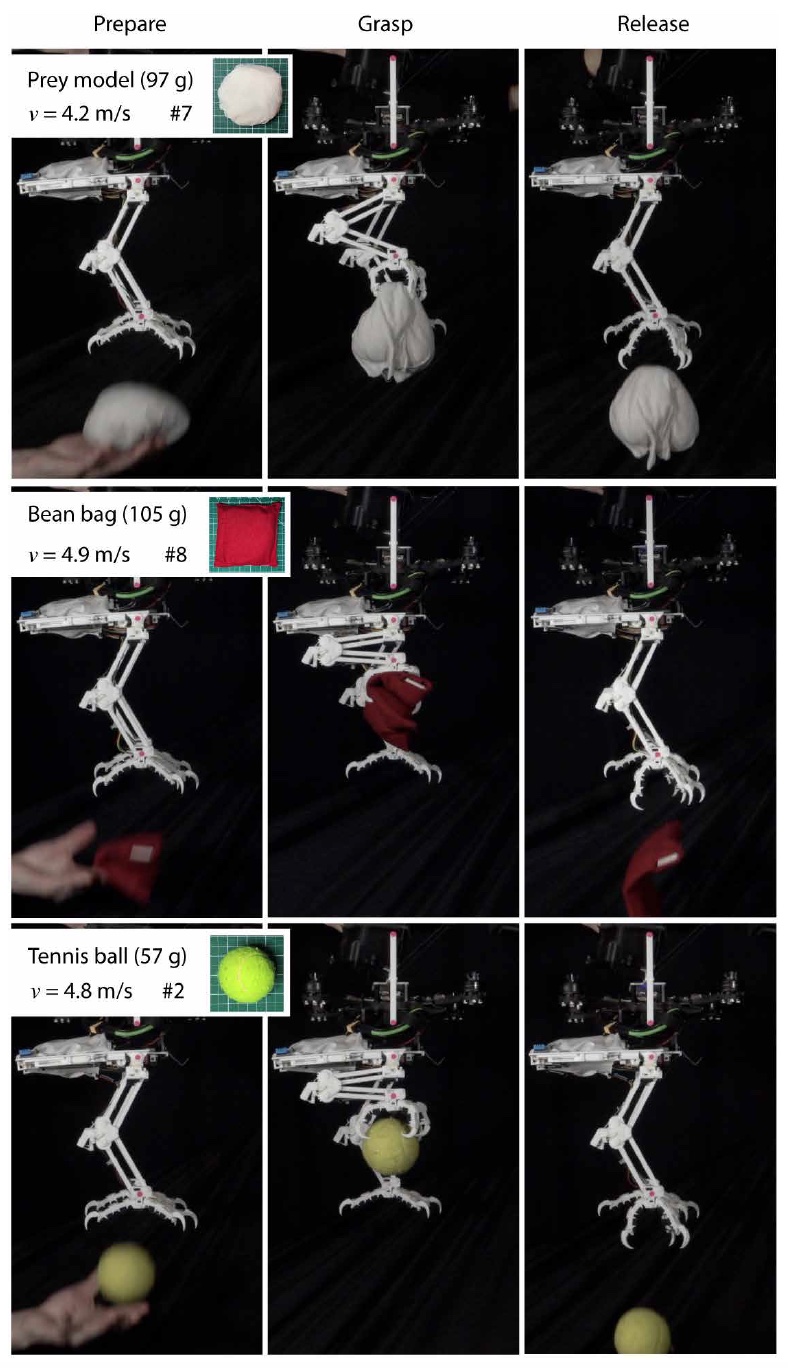
В заключении ученые проверили, насколько успешно робот SNAG сможет хватать объекты в воздухе. Эксперименты показали, что SNAG может ловить и выпускать объекты такого же размера и веса, как и добыча сапсана. Кроме того, было установлено, что SNAG может ловить объекты во время полета на открытом воздухе.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали своего робота-птицу SNAG. Однако, в отличие от многих аналогичных разработок, они сделали упор не на имитацию птичьего полета, а на приземление на ветки. То, что кажется простым и естественным для птиц, в исполнении робота требует учета множества факторов и настройки множества параметров. Проведя математическое моделирование и сравнение с действиями птиц, ученые смогли установить, какими должны быть настройки их робота, чтобы тот мог успешно приземляться и даже хватать объекты воздухе, как это делают некоторые хищные птицы.
Ученые считают, что их разработка может быть использована для исследования и мониторинга местности, которая ввиду рельефа или большого числа растительности не позволяет дронам приземляться классическим путем. Объединив современные дроны с системой приземления SNAG, можно создать идеальное устройство для мониторинга состояния окружающей среды, к примеру, в условиях тропических лесов.
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! :)
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
