
Использование GPIO в Raspberry Pi из ROS
Недавно, изучая книги по практическому использованию ROS, я узнал об интересной возможности использования портов GPIO, доступных на Raspberry Pi из ROS. В этой статье я хочу рассказать о том, каким образом это возможно осуществить. Для доступа к портам GPIO на плате Raspberry Pi мы будем использовать библиотеку Wiring Pi. Кого заинтересовала эта тема, прошу под кат.
Установка Wiring Pi
Для начала установим библиотеку Wiring Pi на Raspberry Pi:
git clone git://git.drogon.net/wiringPi cd wiringPi ./build Схему назначения портов GPIO на Raspberry Pi можно посмотреть в статье.
Пример Blink LED
Мы сделаем простой пример мигания светодиодом с помощью команд, которые будем публиковать в топик ROS. Мы подключим светодиод к пинам на Raspberry Pi таким образом: короткую ножку (катод) к порту GND, длинную ножку (анод) к порту GPIO18 (пин номер 12 на схеме).
У нас получится такое подключение:
Создадим пакет ROS:
catkin_create_pkg ros_wiring_example Создайте файл C++ со следующим кодом:
#include "ros/ros.h" #include "std_msgs/Bool.h" #include //Wiring Pi header #include "wiringPi.h" //Wiring PI first pin #define LED 1 //Callback to blink the LED according to the topic value void blink_callback(const std_msgs::Bool::ConstPtr& msg) { if(msg->data == 1){ digitalWrite (LED, HIGH) ; ROS_INFO("LED ON"); } if(msg->data == 0){ digitalWrite (LED, LOW) ; ROS_INFO("LED OFF"); } } int main(int argc, char** argv) { ros::init(argc, argv,"blink_led"); ROS_INFO("Started RPi Blink Node"); //Setting WiringPi wiringPiSetup (); //Setting LED pin as output pinMode(LED, OUTPUT); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("led_blink",10,blink_callback); ros::spin(); } Здесь мы включаем библиотечный файл wiringPi.h и добавляем инициализацию вызовом метода wiringPiSetup(). Методы pinMode() и digitalWrite() выполняют то же самое, что одноименные методы, используемые для Arduino.
Создадим файл CMakeLists.txt с таким содержанием:
cmake_minimum_required(VERSION 2.8.3) project(ros_wiring_examples) find_package(catkin REQUIRED COMPONENTS roscpp std_msgs ) find_package(Boost REQUIRED COMPONENTS system) //Include directory of wiring Pi set(wiringPi_include "/usr/local/include") include_directories( ${catkin_INCLUDE_DIRS} ${wiringPi_include} ) //Link directory of wiring Pi LINK_DIRECTORIES("/usr/local/lib") add_executable(blink_led src/blink.cpp) target_link_libraries(blink_led ${catkin_LIBRARIES} wiringPi ) У нас будет простая логика. Создаем подписчика на топик led_blink типа Boolean. Если приходит значение 1, то зажигаем светодиод. Если приходит 0, то гасим светодиод.
Далее компилируем пакет:
cd ~/ catkin_make source devel/setup.bash И наконец запускаем узел:
roscore Мы должны залогиниться из-под пользователя root для запуска узла:
sudo -s cd /home/pi/ rosrun ros_wiring_example blink_led Отправим команду для включения светодиода:
rostopic pub /blink_led std_msgs/Bool 1 Отправим команду для выключения светодиода:
rostopic pub /blink_led std_msgs/Bool 0 Все очень просто. Мы просто указываем топик blink_led, тип сообщения std_msgs/Bool и значение: 0 или 1.
Теперь можно использовать всю силу портов GPIO на Raspberry Pi в своих проктах. Мы можем подключать ультразвуковые сенсоры дистанции, сервомоторы и тд. и управлять ими или получать данные с них в узлах ROS без необходимости подключать дополнительные платы типа Arduino.
Желаю удачи в ваших робототехнических проектах с Raspberry Pi и до новых встреч!
Источник
Похожие статьи
 Эксклюзивное интервью Хабра с Ником Бостромом
Эксклюзивное интервью Хабра с Ником Бостромом Три секретами европейских валют
Три секретами европейских валют Видеосвязь больше не гарантия: как дипфейки подрывают доверие в бизнесе
Видеосвязь больше не гарантия: как дипфейки подрывают доверие в бизнесе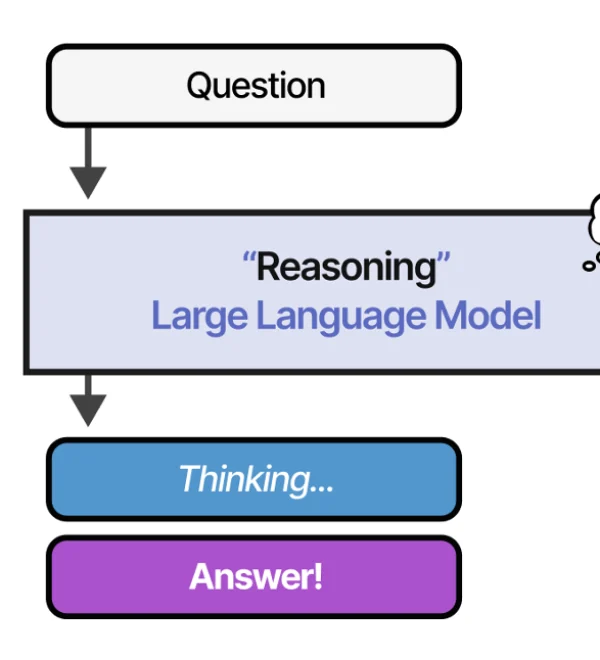 Как мыслит языковая модель
Как мыслит языковая модель Обычные телескопы способны обнаружить межзвездные лазерные маяки внеземных цивилизаций
Обычные телескопы способны обнаружить межзвездные лазерные маяки внеземных цивилизаций Здравый смысл против релятивизма
Здравый смысл против релятивизма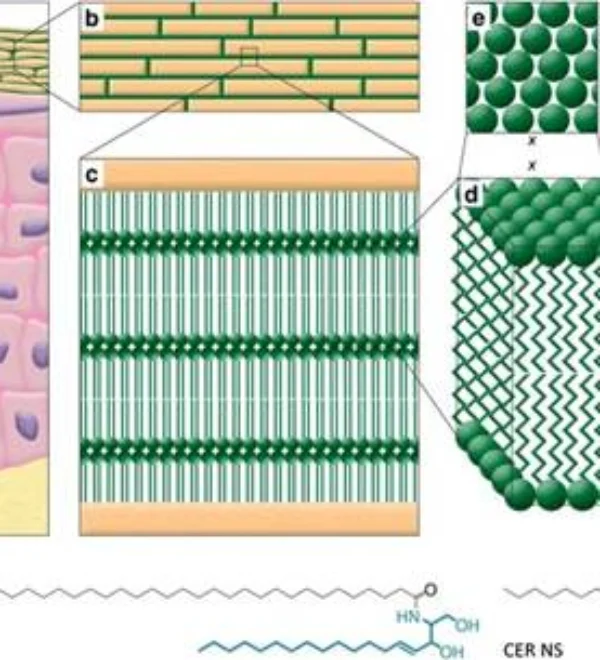 Анатомия кожи: как работает ее естественная защита?
Анатомия кожи: как работает ее естественная защита? Глобальная Управляющая Система: интерпретация высшего разума через призму ТАУ и кибернетики
Глобальная Управляющая Система: интерпретация высшего разума через призму ТАУ и кибернетики