В преуведомлении к этой статье позволю себе отрекламировать одного из самых харизматичных и разносторонних интеллектуалов в России, с кем мне доводилось играть в «Что? Где? Когда?» и доверительно общаться – Дмитрия Славина из Долгопрудного. В настоящее время Дмитрий преподаёт географию, о чём не так давно дал большое интервью сайту «Правмир», а также ведёт в Москве интереснейшие авторские квизы «Ёквиз», в онлайн-тестировании которых я стараюсь участвовать. Дмитрия я по-прежнему с нетерпением жду на Хабре как потенциально топового автора, именно от него знаю слова «джипни», «Аннапурна» и «нойон», а также почерпнул множество вкуснейших идей и фактов. В одном из недавних тестовых прогонов узнал от Дмитрия о выдающемся географическом открытии конца XX века – пещерной реке Пуэрто-Принсеса на филиппинском острове Палаван. Река описана в 1999 году, её длина составляет более 8 км. Сейчас часть гротов с Пуэрто-Принсесой окультурена, туда водят экскурсии.
Этот природный феномен заставил меня задуматься о том, как вообще происходит картирование пещер и подземелий, какой софт для этой цели существует, и какую пользу может иметь такая практика для развития новых технологий. Именно об этом коротко расскажу под катом..
В настоящее время спелеология активно развивается как продолжение географии (топографии), археологии и геологии, а также органично сочетается с такими высокотехнологичными дисциплинами как геоинформационные системы (далее ГИС), работа с облаком точек, генерация трёхмерных карт помещений, сшивание изображений (image stitching). При картировании пещер важно учитывать породы и возраст галерей, динамику их изменения, затопление переходов и возникновение новых входов и завалов. Карта пещеры по определению является трёхмерной и ветвящейся. Кроме того, часть пещеры может быть затоплена, а некоторые переходы между большими залами могут быть преодолимы для роботов, но недоступны для человека. Кроме того, картирование может вестись в полной темноте – в таком случае робот должен полагаться не на оптические, а, прежде всего, на ультразвуковые и инфракрасные данные.
Картирование пещер позволяет наработать полезные методы ориентирования и на урбанизированных территориях, например, в метро, канализации или в малоисследованных подземных сооружениях. Наконец, такие навыки и методы могут быть полезны при экстренной борьбе с завалами, затоплениями, обрушениями шахт и при спасательных работах в целом.
Исследование пещер и уникальность каждой из них
С эмпирической точки зрения «пещера» — это полость или пустое пространство в породе, причём, размер этой полости достаточен, чтобы туда мог войти человек. Более строгое научное определение было сформулировано в 1984 году и приводится Дэйвом Джиллесоном в книге «Caves: Processes, Development and Management»: это «Естественная полость в скальной породе, служащая каналом для потоков воды между входными точками, где потоки попадают под землю, и выходными точками – например, ключами или просачиваниями». Пещеры формируются в результате геологической динамики и тектонических процессов, при этом, в пещерах постоянно проходят растворительные и натёчные процессы, в том числе, химические реакции с участием воздуха, воды и горных пород.
Каждая пещера уникальна, поскольку формируется в течение сотен и тысяч лет в специфических геологических, морфологических и климатических обстоятельствах. Спелеология, как и все естественные науки в наше время, оперирует множествами данных, поддающимися статистической обработке и классификации. Тем не менее, крупная старая пещера всегда является недоизученным объектом, так как в ней могут обнаружиться новые залы, коридоры и полости, её ходы могут обваливаться или затапливаться. Кроме того, могут быть найдены новые выходы либо идти тектонические процессы. Поэтому пещера – это «постоянно обновляющееся» множество данных, и её требуется время от времени заново обследовать как вручную/пешком, так и с применением технических средств. Исследование пещеры планируется в зависимости от известной геометрии её коридоров, а также от присутствующих в пещере уровней, которые можно разделить на три основные категории: 1) надземная часть 2) подземная часть 3) подводная часть. Именно подводную часть пещеры бывает чрезвычайно сложно картировать, так как уровень воды может меняться, сама вода в затопленных коридорах зачастую бывает мутной, а течение подземных рек бывает стремительным.
В начале XXI века метод наземного лазерного сканирования (НЛС) достаточно развился, чтобы можно было применять его не только в инженерном деле и горной промышленности, но и в спелеологии. На современном этапе этот подход адекватно отражает геометрию коридоров, а также хорошо интегрируется с обработкой фотоснимков и со сшиванием общей карты пещеры из отдельных изображений. Тем не менее, этот подход слишком близок к чистому 3D-моделированию, при нём сложно учитывать увлажнённость/обводнённость и степень эрозии коридора.
Другие технологии, заимствованные в спелеологии из географии – это работа с ГИС (геоинформационными системами), картирование по GPS, использование лазерного дальномера (лидара), создание 3D-моделей коридоров на основе топографических баз данных, моделирование коридоров на 3D-принтере, а также моделирование и достраивание очертаний коридора по облаку точек. Софт для исследования и моделирования пещер стали разрабатывать с конца XX века, а в новейшее время (с улучшением связи и геолокации) для этих целей стали применяться также мобильные роботы и дроны. Наконец, существуют спелеологические мобильные приложения, фактически, превращающие смартфон в интеллектуальный фонарик, компас и искатель пути – но в таких приложениях необходимо ювелирно отлаживать энергопотребление и устранять погрешности. Работа с такими приложениями также требует создавать новые типы данных и предусматривать взаимосвязи между ними.
Принципы и технологии
Технологии картирования пещер закладывались в конце XIX века в рамках развития маркшейдерской съёмки. Наиболее традиционным методом, до сих пор применяемым на практике, является обход коридоров по компасу. В течение XX века спелеологи освоили теодолит, позже стали эпизодически применять тахеометры, что позволило повысить точность измерений. Эти приборы проникли в спелеологию через организацию инженерно-строительных работ в пещерах (расширение входов, разбор завалов, укрепление сводов). Как правило, такое примитивное картирование сводится к построению траверсной линии, соединяющей ключевые точки, получаемые переносом измеренных расстояний и углов в Декартовы координаты.
Важной вехой в картировании пещер стало внедрение технологий дистанционного зондирования (примерно с начала XXI века). Наиболее плодотворны в данном случае фотограмметрия, лазерное сканирование и схватывание морфологии стен и сводов пещеры в виде облака точек, после чего полученная трёхмерная модель в высоком разрешении выводится на экран. 3D-модели (создаваемые, в том числе, в обычном Blender) можно как воспроизводить при помощи 3D-печати, так и выстраивать в виртуальной реальности. Ещё интереснее в данном случае использовать дополненную реальность, в которой спелеолог может пройти маршрут, по пути просматривая раскрывающиеся информационные вставки и видя путь в хорошем освещении.
Итак, основными данными для построения спелеологических карт являются детали траверсной линии, рельеф сводов и коридоров, длина, высота и ширина полостей, минералогический состав, а также детали, потенциально осложняющие движение. К последней категории относятся скальные преграды, осадочные породы (галька, глина, песок), натёчные образования, береговые линии подземных рек, техногенные объекты (мосты, перила, бетонные галереи). Карта пещеры всегда является трёхмерной и динамической, должна учитывать не только скорость и полноводность подземных рек, но и следы тектонической активности (например, горячие растворы в гидротермальных пещерах), а также резкие изменения уклона. Такие карты можно составлять при помощи специальных пакетов для ГИС, в частности, для программ SAS.Planet или AlpineQuest (под Android, платная). С конца XX века существует и специализированный спелеологический софт, в качестве примеров упомяну три программы.
Compass
Программа существует в продакшене примерно с 1999 года. Моделирует пещерные коридоры в 3D, интегрируется с ГИС, совместима со всеми версиями Windows от XP до 10. Обладает настраиваемым редактором маршрутов, позволяет наносить на карту входы в пещеру с указанием их высоты, а также даёт цветную карту исследованной части пещеры, где цвет характеризует глубину участка.

В новейших версиях появилась анимация участков маршрута, сами карты экспортируются в формат SVG, а метаинформация о маршруте и геометки – в табличный формат. Программа позволяет вести базу данных о пройденных маршрутах.
Cavewhere
Сильной стороной этой программы является собственный мощный движок для 3D-визуализации, позволяющий в реальном времени преобразовывать отрисовываемые пользователем 2D-карты в объёмные модели коридоров. Совместима с Windows, Mac и Linux.
Делает проекции и поперечные сечения пещеры под любым углом, экспортирует данные в SVG, PDF или форматы изображений. Важной фичей является обновляемый список маршрутов с указанием расстояния до лагеря с указанием размеров коридора и краткими описаниями маршрута.

Therion
Этот программный пакет (официальный сайт) был создан словацкими спелеологами Мартином Будаем и Стахо Мудраком в 1999 году. Программа позиционировалась как инструмент для отрисовки плоских карт пещер. С 1996 по 1999 год авторы вручную нарисовали 166-страничный атлас Пещеры Мёртвых Летучих Мышей и попытались оцифровать его при помощи AutoCAD. После того, как эта задача была сочтена неподъёмной, авторы решили написать DSL METAPOST для преобразования 2D-карт в 3D-модели, а все подписи реализовали в формате TEX. В течение 1999-2000 годов для программы был написан первый пользовательский интерфейс, потом в коде появились скрипты на Perl, и, наконец, программа была полностью переписана на C++.Программа до сих пор является незаменимым инструментом для создания динамических карт и преобразования 2D-карт в 3D-модели. Поддерживается в Windows, Mac и Linux. Therion использовалась для картирования крупных и многоуровневых пещер в Европе и обеих Америках. Её сильной стороной является сшивание изображений в правильной ориентации и выстраивание карты с разных сторон (начиная от разных входов в пещеру). Но для всех вышеперечисленных программ характерна общая проблема: вычерчиванием исходных карт должен заниматься человек, софт только уточняет и аннотирует эти карты, а также преобразует их в 3D-модели. Для совершенствования карт и автоматизации их подготовки требуется не только программное, но и аппаратное обеспечение: портативные устройства с хорошим зарядом батареи, которые обеспечивали бы, как минимум, определение расстояний при помощи лазерного дальномера (лидара).
Auriga и спелеологическое ПО для iPhone
Специализированные гаджеты для планирования и первичного прохождения спелеологических маршрутов появились в середине 2000-х, чуть раньше смартфона, как только появилась возможность обеспечить ударопрочность такого прибора, хороший заряд батареи, а также интеграцию GPS и ГИС в прошивке. Одним из первых программных пакетов такого рода, для работы с которым конструировались специальные PDA, был канадский софт Auriga. Вот как выглядит наладонный компьютер с такой программой:
Тем не менее, возможности оперативного использования таких устройств ограничены, так как в глубине пещер система GPS не работает. Как правило, они применяются для обхода пещеры на поверхности, обнаружения и картирования входов в пещеру. Таким образом, можно примерно представить очертания пещеры и длину её галерей. После этого маршруты проходятся под землёй с компасом и дальномером, составляется карта маршрута, и на нём кроме входов и выходов могут быть расставлены подземные точки, в которых могут быть оборудованы перевалочные пункты или базовые лагеря. Такие программы в большей степени полезны как разведочные, чем как туристические, и могут использоваться только в дополнение к компасу. Основные аспекты, отличающие спелеологические карты от обычных ГИС – прежде всего, 1) трёхмерность, 2) учёт уровня воды относительно галерей и учёт уровня галерей относительно земли, 3) учёт динамики развития пещер, в частности, расположение обвалов и выходов – вполне реализуемы и без постоянного подключения к GPS, поэтому были успешно адаптированы в программе Polycam для iPhone. Описанные ниже эксперименты проделаны в пещере Торхола на юге Финляндии в 2021 году и опубликованы на сайте Tetongravity.
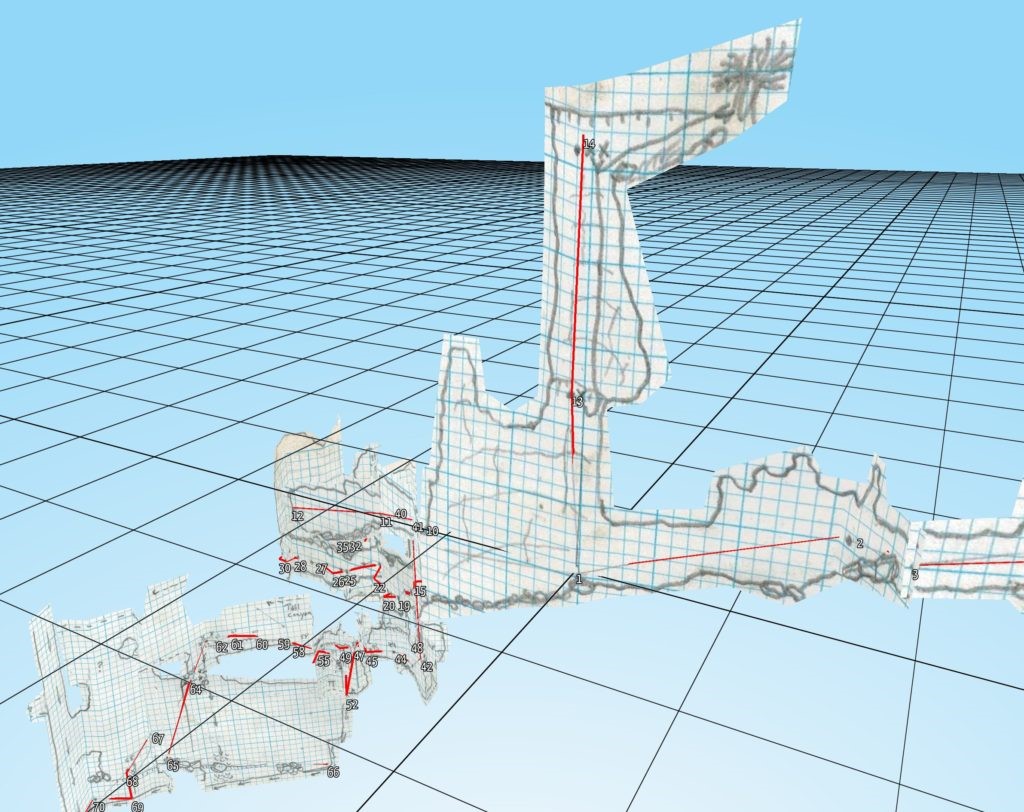
В общем виде процесс 3D-моделирования пещеры на iPhone выглядит так.
1. 3D-модель пещеры создаётся при помощи приложения Polycam для iPhone (платная версия приложения). Заводится новая Polycam в режиме «space».
2. При необходимости собрать крупную модель из нескольких более мелких применяется опция «extend» и/или создаются дополнительные модели. Результат экспортируется в формат GLB или Blender, но GLB в данном случае более предпочтителен, так как лучше передаёт текстуру сводов, а также может принимать данные из видеозаписи..
3. Polycam работает на основе технологии LIDAR (лазерного дальномера) и предназначена для интерьерной съёмки, поэтому не так хорошо подходит для работы в условиях пещер. Таким образом, сенсоры дают наилучший результат, если не меняется на расстояние до фотографируемых стен, ни освещённость. Но коридоры в пещерах бывают настолько узкими, что лидар располагается в считанных сантиметрах от стены, и тогда картинка размывается. Кроме того, в стенах могут встречаться узкие длинные полости, и в модели такие объекты превращаются в «дырки». На алгоритмическом уровне программа не отличает такие отверстия от входов в пещеру, поэтому иногда в моделях могут возникать артефакты в виде фрактальных отверстий.
4. Также сообщается, что из-за постоянно меняющихся сочетаний уклона стен и уклона пола в пещере программа не всегда справляется с ориентацией по осям, и в готовых моделях одни участки могут накладываться на другие. Тем не менее, после постобработки модели пещер из Polycam получаются точными и наглядными. Вот их подборка, а вот как выглядит схема и 3D-модель пещеры Торхола:

Картографирование пещер с применением роботов
Сложности, описанные выше, в целом устранимы, если решить несколько прикладных проблем:
1) Картировать пещеру при помощи мобильного робота или беспилотника, способного проникнуть в узкие проходы или на высокие ярусы пещеры, недостижимые для человека
2) Оснастить такой аппарат несколькими камерами для съёмки в полутьме или темноте, которые будут функционально дополнять лидар
3) Обеспечить бесперебойную связь с таким роботом и заряд батареи, позволяющий машине работать значительно дольше, чем смартфону или гаджету
4) Вместе с лидаром применять технологию SLAM (одновременную локализацию и картографирование)
5) В качестве бонуса – робот можно было бы сделать модульным, чтобы он мог разделяться на звенья для проникновения в особо труднодоступные места, а затем вновь собираться воедино.
Подобные исследования уже проводились с применением как БПЛА, так и колёсных роботов. Среди БПЛА с функционалом SLAM интересен Bentwing, сконструированный в 2015 году австралийскими и швейцарскими учёными, ведущий непрерывную съёмку при помощи вращающегося 2D-сканера. Этим аппаратом постоянно должен управлять оператор, одновременно контролирующий высоту полёта и положение самого дрона. Отснятые данные проходят постобработку и сшиваются в общую карту. Другая модель БПЛА, предназначенная именно для картирования закрытых пространств и, в частности, пещер, называется 3DR Iris+. Последний, также работающий по технологии SLAM, специально разрабатывался с расчётом на работу без привязки к GPS, с ориентацией только по собственному лидару и сенсорам. 3DR Iris+ оснащён компьютером Odroid XU4 с операционной системой ROS, двумя оптическими камерами (передней и нижней), а также системой ориентирования Optitrack, определяющей координаты робота и взаимодействующей с 6 инфракрасными камерами. 3DR Iris+ тестировался в закрытых помещениях, в частности, в узких коридорах. В нём предусмотрена возможность вертикального взлёта и проникновения в отвесные расселины, в которые человек попасть никак не может.

Также для аналогичных спелеологических исследований использовалась и роботизированная платформа DEep Phreatic THermal eXplorer (DEPTHX). Этот робот предназначался для спуска в сеноты – естественные карстовые колодцы, характерные для полуострова Юкатан. Проект DEPTHX разрабатывался для потенциального спуска под лёд Европы, спутника Юпитера, и в данном случае привлёк исследователей не только герметичностью, но и тем, что связь для него была настроена в низкочастотном радиодиапазоне, то есть, совершенно не зависит от GPS.
Опираясь на эти разработки, группа инженеров под руководством Натана Майкла из робототехнической лаборатории университета Карнеги-Меллона в 2021 году связала в радиодиапазоне роботизированную колёсную платформу и дрон. Дрон был сконструирован таким образом, чтобы пролетать и картировать пещерные галереи шириной не менее 70 см. Дрон, оснащённый лидаром, передаёт данные платформе, которая использует технологию SLAM и строит плоскую карту коридора. Затем собранные данные сшиваются в трёхмерную карту. Ниже показано как выглядит летящий дрон в пещере на территории Западной Вирджинии, а также дрон, расположенный на роботизированной платформе.

В этой статье я предпочту обойтись без категорических выводов, но и не буду оставлять открытый финал. Надеюсь, вам было интересно, и вы представили, какое неоценимое значение могут иметь эти разработки при исследовании каменных небесных тел, освоении ближайшего космоса и, в частности, организации долговременных подземных баз на Луне и Марсе. В условиях, когда не гарантирована не только GPS-навигация, но и работа обычного компаса (в случае отсутствия магнитного поля) описанная высокотехнологичная спелеология может стать началом инопланетной географии, а не только продолжением земной.


