Отклик на предыдущую статью был неплохой, все собирался продолжить, да только новогодние выходные дали такую возможность.
В этот раз хочу рассказать про опыт нашей разработки портативной системы для рентгеновского контроля печатных плат и различной электроники/гаджетов.
Для чего мы этим занимаемся – рентгеновские детекторы премиального класса у нас уже есть, их активно используют в контроле сварки, керамики, композитов и научных исследованиях (например в питерском ЛЭТИ или Ядерном институте в Дубне).
Следующий шаг — «потыкать» в рынок готовых рентгеновских систем и комплексов «под ключ». Тут взор падает на два направления: рентген электроники и томография. В обоих случаях нужно получить максимальное разрешения и низкий уровень шумов в рентгеновском изображении, с чем наша продукция справляется идеально.
Начнем с рентгена электроники, ибо томография это отдельный мир.
Зачем нужен рентген электроники?
Варианты ответа, нужное подчеркнуть:
• Монтаж печатных плат делали «рукожопы»
• Технологи намудрили с режимами при автоматической пайке
• Микросхемы с контактами BGA (в основном память) не работают
• Плата не стартанула, возможно из-за КЗ
• Контрафакт микросхем (вообще без контактов или муляж, на хабре есть отдельная статья на эту тему)
• Плохой контакт горячих элементов и радиатора, срабатывает отключение
• Любой другой сюрприз на фабрике дядюшки Ляо
• Лень разбирать уже готовое изделие
• Большой брат следит за нами и норовит поставить жучок

Окей гугл, как сделать рентген электроники без регистрации и смс?
Архитектурно схема простая – нам нужен детектор (есть), источник рентгеновского излучения (нашли), система перемещения или что-то для автоматизации подачи объекта контроля (сделаем). Заворачиваем все это в свинцовую обертку, ставим ПО и вуаля – система готова.
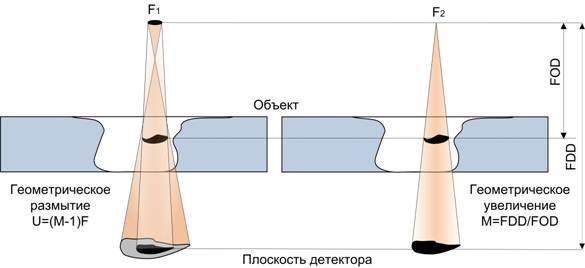
Источников рентгеновского излучения в мире много, производятся они и в России. Отличаются анодным напряжением, мощностью, размером фокуса, углом выхода рентгеновского пучка, еtс. Нам интересен только класс микрофокусных источников, это когда пучок рентгеновского излучения исходит из очень маленького пятна (фокуса). Диаметр этого пятна должен составлять микроны, что позволяет работать в режиме геометрического увеличения. Меньше фокус – меньше размытие на границе рентгеновской проекции нашего объекта и большее увеличение мы можем сделать. В пределе получается рентгеновская микроскопия 5000 крат и более.
Для наглядности:
Микрофокусный рентгеновский источник
В целом это не penis canina. Пятнышко микронного размера (5-30 мкм) даже на вольфрамовом аноде не может принять в себя большую тепловую мощность, а она нужна для просвечивания металлических корпусов и работы в видео режиме (экспозиция на кадр в миллисекундах).
Решений этой проблемы много: алмазные подложки, титанические системы охлаждения анода, рентгеновские трубки с жидким металлическим анодом (стоят как самолет).
Мы выбрали отечественную рентгеновскую трубку с фокусом 15-30 мкм и водяной системой охлаждения анода дабы не раздувать итоговую цену системы. Коэффициент геометрического увеличения у нее невелик (до 50 крат), мощность тоже (до 10 Вт), но этого хватает для решения обычных задач.
Система перемещения
Нам необходимо перемещать объект контроля под рентгеном (оси XY), играться с увеличением (ось Z), желательно иметь возможность посмотреть объект под углом или повернуть его на угол (оси АВ). Итого максимум 5 осей перемещения.
Трехмерная модель выглядит примерно так:

Ничего не напоминает? По сути это 3д принтер с пятью осями на CoreXY геометрии.
Слава науке, в мире огромное количество энтузиастов трехмерной печати и существуют открытые проекты по электронике и встраиваемому ПО для них. Мы сделали прототип на RAMPS + ПО GRBL, аккуратно сильно доработав напильником.
Прелести работы с дядюшкой Ляо
Настоятельно рекомендую развести и собрать новые версии плат управления и драйверов шаговых двигателей. Купленные с алиэкспресса детали могут подвести в любой момент. В части драйверов нам хватило обычных А4988, которые были под рукой, но можно присмотреться и к более мощным собратьям на микросхеме TB6600 или аналогам.
В части направляющих – любые брендовые, например Hiwin, все остальное – лотерея.
Многие комплектующие для 3д принтеров и ЧПУ, продаваемые у нас, это тот же алиэкспресс. Никаких гарантий вам не дадут. Из личного опыта – кривые рельсы, ручная прочистка кареток, смазка, шаговые двигатели с разным количеством витков и габаритами, разные модели втулок и гаек при одинаковых артикулах – все это прелесть работы с ноунеймом. Зато дешево, да.
Мы, естественно, все переделали.
Программное обеспечение
Для старта использовали ОЕМ ПО для работы с рентгеновскими изображениями, т.к. есть ряд партнерских компаний-разработчиков под наши детекторы с хорошим функционалом.
Для управление системой перемещения использовали форк утилиты UGS, доработан напильником.
Следующий шаг — разработка собственного ПО, максимально заточенного под задачу контроля электроники + автоматизации анализа на нейросетях.
Итог
Собрали и запустили MVP, отлаживаем и собираем серию. Даже удивительно, что при цене в 50% от ближайшего европейцаяпонца решаем «на ура» большую часть рутинных задач.
P.S. Если вам интересно то, чем мы занимаемся — пишите. Будем хайрить команду под этот проект. Desktop, Qt, openCV, Linux, из вкусного — опционально поддержка Эльбруса.
Видео
На что похожа работа с системой с точки зрения пользователя:
Картинки







")

