
Вдохновением для ученых может быть все что угодно. А если говорить о представителях флоры и фауны, то они лидеры в списках муз, вдохновивших великие умы на создание самых разных устройств, машин и целых технологий. Сегодня мы познакомимся с исследованием, вдохновителем которого стало существо, «рукопожатие» с которым заняло бы некоторое время — осьминог. Ученые из университета штата Северная Каролина решили создать устройство, которое подобно конечностям осьминога, сможет обрабатывать информацию и принимать решения на уровне материала и без централизованного компьютера. Из чего состоит это устройство, какие функции оно уже умеет выполнять и каковы перспективы «мягкой тактильной логики»? Об этом мы узнаем из доклада исследовательской группы. Поехали.
Основа исследования
Осьминог — самый смекалистый беспозвоночный моллюск из отряда головоногих. Мягкое тело осьминога оснащено восемью щупальцами, на которых имеются специальные присоски, необходимые для фиксации к поверхности, удержания добычи и тактильного исследования окружающей среды. Кроме того, на щупальцах есть еще и вкусовые рецепторы, позволяющие осьминогу определить съедобности того, к чему он прикасается (удобно наверное было бы выбирать продукты на рынке).

Щупальца осьминога уникальны еще и тем, что в них расположено 2/3 всех нейронов его тела, что позволяет щупальцам действовать самостоятельно, т.е. без сигнала из мозга. Забавно, что «руки» осьминога настолько автономны, что это приносит ему некие неудобства. Дело в том, что наш восьмирукий герой не может точно определить положение своих конечностей по ощущениям, а только по прямому наблюдению за своими щупальцами. Это объясняется тем, что осьминог не обладает полноценным стереогнозом, т.е. способностью распознавать объекты на ощупь (их форму, размеры и т.д.). Осьминог может ощущать отдельные участки по текстуре объекта, но не может собрать этот пазл в единую картину. Другими словами, он знает какие движения были сделаны той или иной рукой, только если это увидел собственными глазами. Это конечно иногда вызывает неудобства, но если бы осьминоги могли говорить, то вряд ли они бы жаловались.
Ученые же в данной «ручной» автономности увидели перспективу и решили реализовать анатомическую особенность осьминога с помощью технологий. В своем труде они описывают небольшое и достаточно простое (пока что) устройство из силикона и внедренных в него цепей из жидкого металла, названное учеными «мягкая тактильная логика» (soft tactile logic).
Основными материалами для устройства выступают смесь из легкоплавких галлия (Ga, 75% от общей массы) и индия (In, 25% от общей массы), а также эластомер полидиметилсилоксан (PDMS).
Основным принципом данного прототипа является джоулев нагрев, когда посредством протекания электрического тока выделяется тепло. С помощью этого эффекта, реализуемого именно жидким металлом (температура плавления 15.7 °C) внутри эластомера, получается реализовать изменение цвета прототипа за счет ответной реакции внедренных пигментов.
Таким образом, имеется мягкое и достаточно эластичное устройство, которое меняет цвет в ответ на давление или растягивание. Следовательно, данный процесс протекает без участия какого-либо центра управления, а непосредственно в самом материале прототипа.
Результаты исследования
Ученые отмечают, что изменение цвета было выбрано для данного прототипа не просто так: во-первых, на данном этапе реализации технологии это является отличным и простым способом продемонстрировать основные принципы действия устройства; во-вторых, изменение цвета присутствует как и природе, так и в технологиях. Представители животного мира планеты Земля используют смену цвета для маскировки от хищников, для демонстрации своей ядовитости, для поиска партнера и даже для демонстрации эмоций, что особенно присуще людям (краснее при смущении, бледнеем от страха и т.д.). В технологичном мире цвет также важен, поскольку изменение цвета отдельных пикселей, кластеров пикселей и всей картины в целом на мониторе является методом взаимодействия человек-машина.
Однако существует разница между животными и техникой. Дисплеи часто используют «активные стратегии», основанные на генерации света, а животные используют «пассивные стратегии», когда внешний свет отражается от поверхности.
Реализовать пассивную стратегию изменения пигментации можно, по словам ученых, самыми разными способами: термохромные жидкие кристаллы, цветные жидкости, прокачиваемые через микроканалы, интерференция в тонких пленках, динамические фотонные кристаллы и плазмонные структуры, магнитночувствительные материалы и электрохромные молекулы. В данном же труде были использованы термохромные пигменты.
Изображение №1
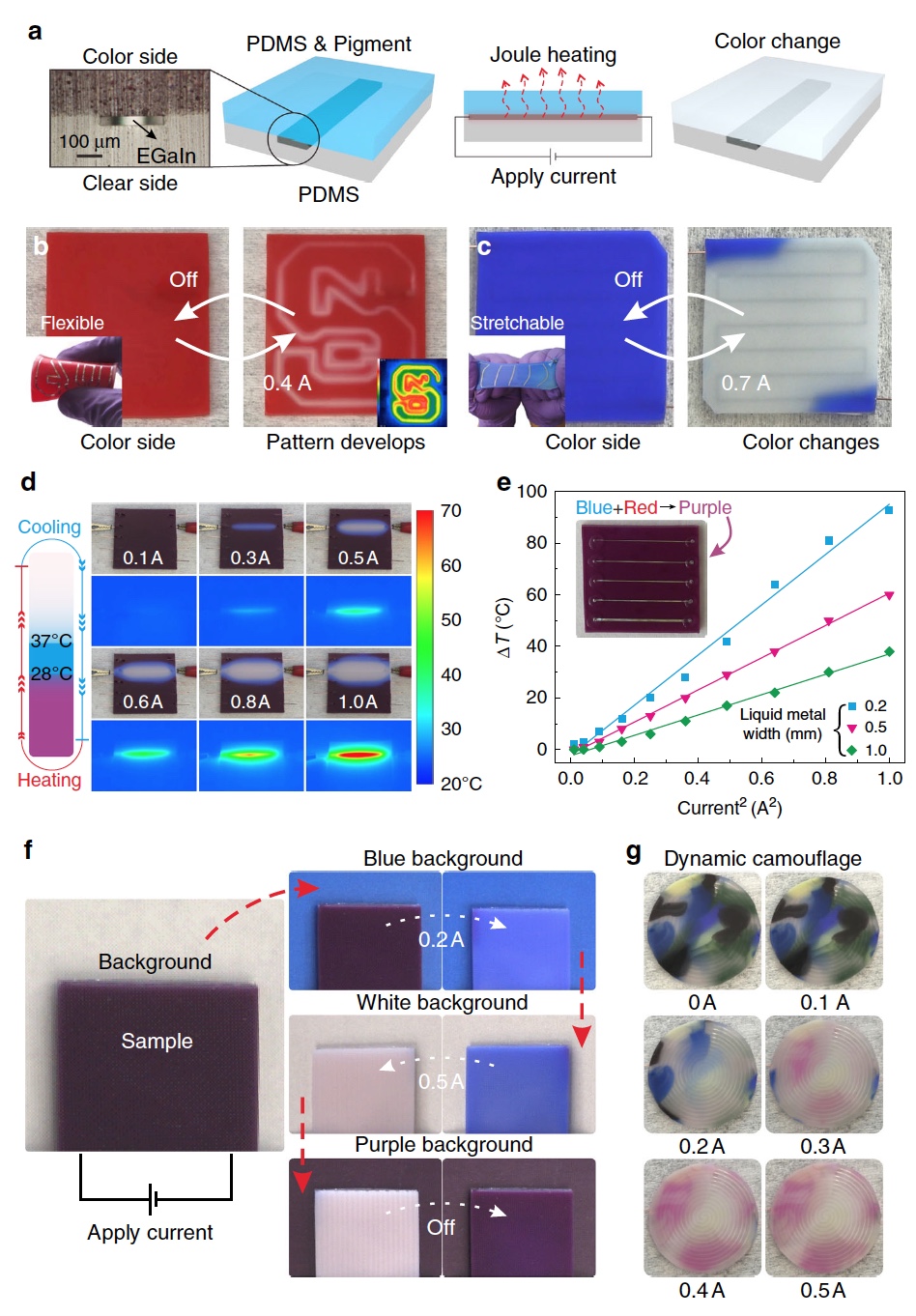
На изображении 1а показана базовая платформа прототипа: жидкий металл, расположен между двух слоев PDMS, один из которых прозрачный, а другой содержит термохромные частицы. Прозрачный слой не нужен для работы устройств, а лишь позволяет хорошенько рассмотреть динамику жидкого металла в процессе исследования. Проходящий через жидкий металл ток генерирует джоулев нагрев, и термохромные частицы изменяют свой цвет выше критических температур из-за перестройки молекулярной структуры.
Для демонстрации этого принципа было использовано термочувствительное вещество TF-R1 розово-красного цвета. Такой вариант устройства сразу демонстрирует красный цвет, но при достижении температуры 28 °C и выше цвет меняется на белый (видео ниже).
Изменение красного цвета на белый при достижении температуры 28 °C.
На ИК-изображении (вставка на 1b) показаны области повышенной температуры, соответствующие наблюдаемой визуальной картине цветовых изменений (1b).
Естественно, подобный принцип можно реализовать с любым цветом. Для примера ученые использовали синие термохромы, и устройство сохраняло синий окрас при комнатной температуре, становясь белым лишь при 37 °C и выше (1с).
Синий цвет меняется на белый при нагреве до 37 °C и выше.
В участках, где цвет не меняется, присутствуют медные провода. А поскольку удельное сопротивление меди (1.68 х 10−6 Ω·см) ниже, чем удельное сопротивление жидкого металла (29.4 х 10−6 Ω·см), генерируется меньше джоулева нагрева, от чего цвет и не меняется при наличии меди.
Учитывая, что разные термохромные вещества имеют разные температуры отклика (активации), смешивание их в одном устройстве создает новую систему, отображающую три цвета (1d).
Динамика температур на 1d также показывает как цвета переходят из одного в другой: пурпурный в синий (Т < 28 °C, так как нет красного), а после в белый (Т > 37 °С, нет синего и красного). В таком устройстве ширина жидкометаллического канала составляет 0,4 мм.
Изменение цвета при изменении тока.
Сам процесс вполне понятен, но необходимо было еще установить при каких показателях мощности происходит изменение цвета. Для этого ученые предположили, что при джоулевом нагреве мощность (P) генерируется на основе приложенного тока (I) и сопротивления жидкого металла (R) в соответствии с P = I2R.
Поскольку сопротивление обратно пропорционально ширине канала, были проведены эксперименты, в которых геометрия устройства оставалась всегда одинаковой, а вот ширина каналов изменялась (вставка на 1e). Как видно на самом графике 1е, температура является линейной функцией квадрата тока. Для данного тока уменьшение ширины жидкого металла увеличивало изменение температуры из-за увеличения джоулева нагрева. То есть увеличение тока не только увеличивает максимальную температуру поверхности, но также увеличивает область, испытывающую повышенные температуры на поверхности.
Были проведены замеры ширины области изменения цвета каждого устройства, для установления связь между током и шириной области изменения цвета. Увеличение плотности тока (за счет увеличения тока либо за счет уменьшения ширины жидкого металла) вызвало расширение областей изменения цвета.
Изменение цвета пигментации в животном мире чаще всего ассоциируют с камуфляжем, т.е. с умением визуально сливаться с окружающей средой. Исследуемое устройство также способно на это.
На изображении 1f показан процесс смены цвета устройства в соответствии с фоном. Этот эффект достигается путем регулировки тока в каналах жидкого металла.
Адаптивное изменение цвета (камуфляж).
Также можно достичь не только однотонной окраски устройства, но разных вариантов сочетания разных цветов (1g). Когда одни цвета при увеличении тока начинают тускнеть, другие становятся ярче.
Динамическое изменение адаптивного изменение цвета.
Как мы уже поняли, огромную роль в успешности работы прототипа играет необычный тип проводника — жидкий металл, который способен менять свою форму, т.е. быть эластичным, что позволяет получить динамические свойства джоулева нагрева ввиду деформаций. Другими словами, подобная система может термохромно сообщать о состоянии устройства (давление, растяжение и т.д.).
Исследователи сравнивают этот эффект с механохимией в мягкой робототехнике, когда изменение цвета соответствует определенному уровню деформации, предупреждая о возможной поломке. Однако в случае жидкометаллического проводника не нужна какая-либо химия, а число колориметрических выходов значительно больше. Учитывая, что изменения цвета хоть и обусловлено термическим воздействием, но все таки активируется механическим путем, ученые назвали этот процесс термомеханохромизмом.
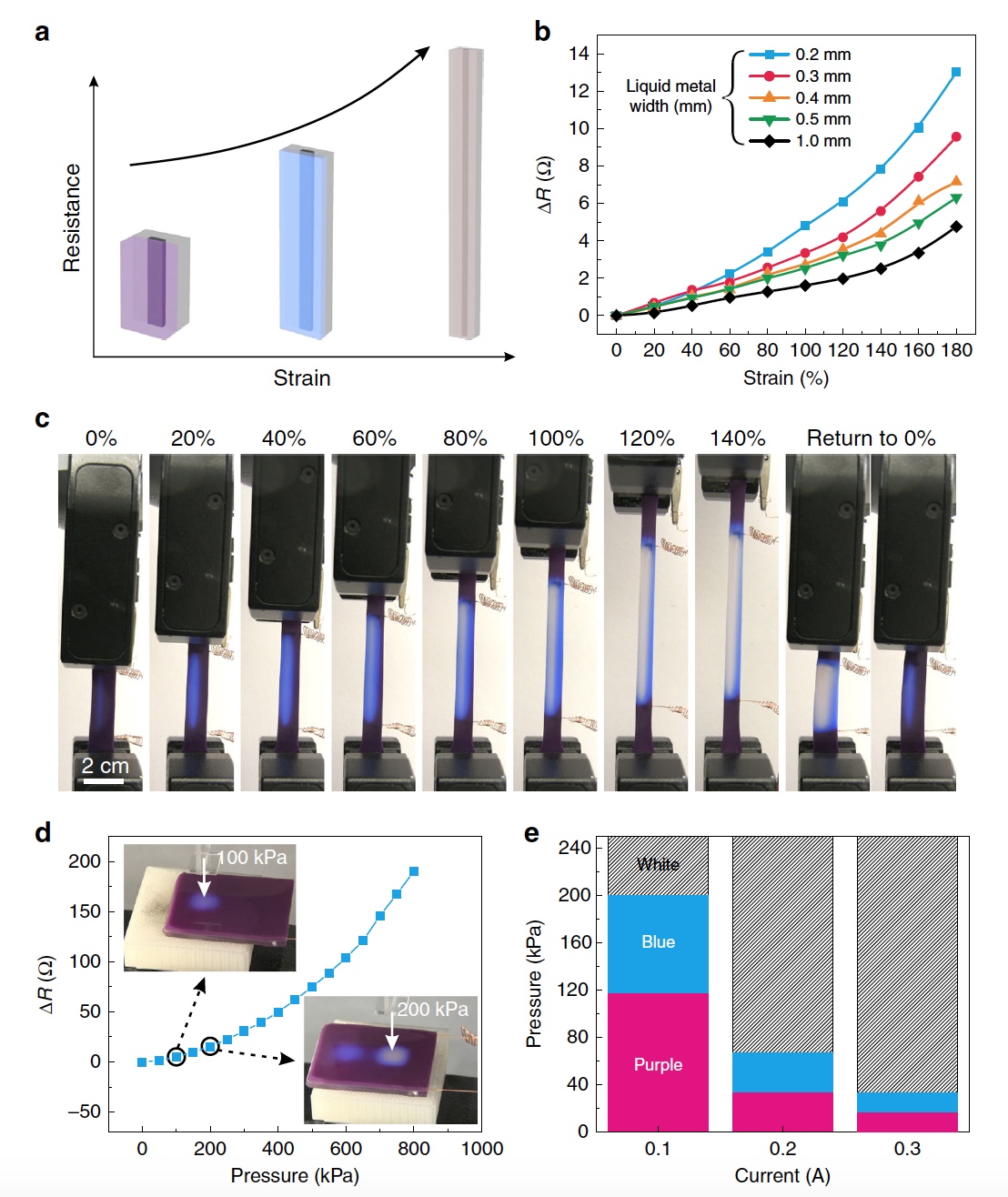
Как же это все работает? Исследователи приводят простой пример — натяжение жидкометаллического канала. В такой ситуации длина канала увеличивается, но площадь поперечного сечения уменьшается. Следствием этого является увеличение сопротивления и, следовательно, увеличение джоулева нагрева (2а).
Изображение №2
Деформация (ɛ = (L — L0)L0-1, где L — длина) приводит к увеличению изначального сопротивления (R0) в соответствии со следующей формулой:
R = R0(ɛ+1)2.
Учитывая данную теоретическую базу, исследователи создали датчик, меняющий цвет в ответ на напряжение. Как и ожидалось, сопротивление жидкометаллического канала увеличивается с удлинением (2b). В момент растяжения применялся постоянный ток 0.2 А (видео ниже).
Демонстрация механохромии.
При нулевой деформации этого тока недостаточно для активации изменения цвета, но при удлинении канала (фактическая деформация) начинает увеличиваться джоулей нагрев, приводящий к изменению цвета.
На изображении 2с показаны снимки жидкометаллических каналов толщиной 0.2 мм при различном напряжении. Устройство меняет цвет с пурпурного на синий из-за отсутствия красного(при температуре > 28 °C) и дополнительно переключается с синего на белый при 60% деформации из-за активации синих термохромных компонентов. Потом устройство снова становится пурпурным, когда возвращается к 0% деформации из-за обратимого термохромизма.
Подобный эффект можно использовать для определения степени деформации и ее локализации за счет оценки цвета и площади цветовых изменений на устройстве.
Дабы понять, как меняется цвет при растяжении и, как следствие, получить возможность настраивать цветовую реакцию на деформацию, ученые объединили две важные для этого труда формулы (P = I2R и R = R0(ɛ+1)2) и получили следующее:
dP / d(ɛ+1) = 2I2R0(ɛ+1).
Данная формула показывает, что изменение мощности (Р) с деформацией (ɛ) зависит от тока (I, в данных экспериментах он постоянный) и от начального сопротивления (R0). Получается, что канал с более высоким начальным сопротивлением будет более чувствителен к растяжению. Для подтверждения этой теории исследователи создали линейный проводник длиной 35 мм, высотой 0.05 мм и шириной Х мм (где Х был равен 0.2, 0.3, 0.4, 0,5 и 1.0 мм), после чего измерили ширину области изменения цвета при подаче постоянного тока.
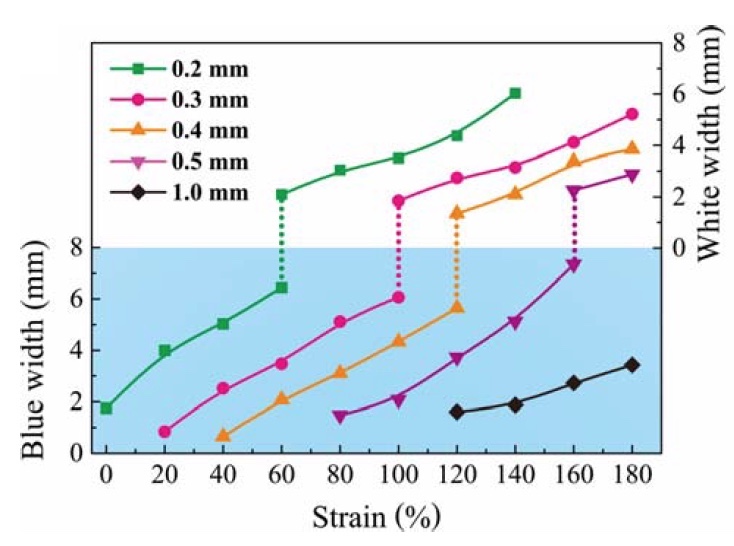
График результатов эксперимента с разным сопротивлением.
В следствии эксперимента было установлено, что устройства с более узким жидкометаллическим каналом меняет цвет при более низком сопротивлении. И наоборот, самое широкое устройство никогда не становится белым даже при 180% деформации из-за его низкого начального сопротивления. А это говорит о том, что можно настроить устройство, отрегулировав начальное сопротивление так, чтобы изменение цвета происходило при определенном значении напряжения.
Кроме сопротивления еще одним важным фактором изменения цвета является ток. Во время эксперимента на устройство с каналом шириной 1 мм применили ток 0.2, 0.3 и 0.4 А.
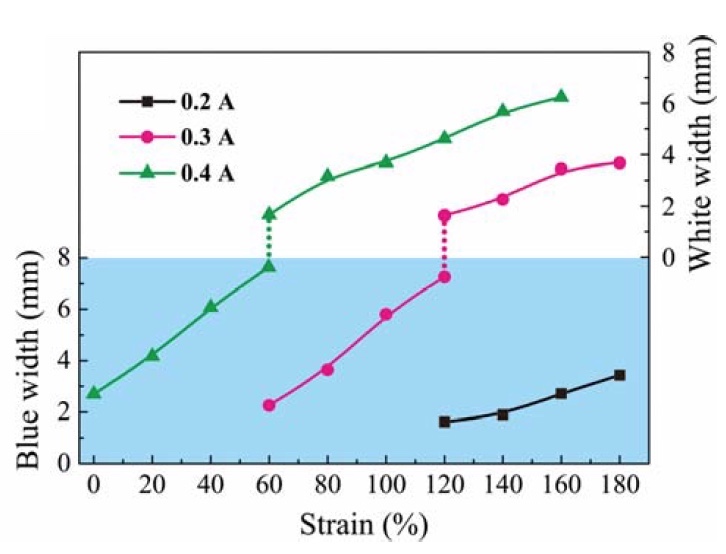
График результатов эксперимента с разным током.
Устройство не меняет цвет на белый при удлинении с использованием 0.2 А. После увеличения тока до 0,4 А устройство может менять цвет при низкой деформации (≈50%). Это наблюдение подтверждает, что ток можно использовать для контроля деформации в местах изменения цвета.
Помимо растяжения существует ряд других видов деформации, одним из которых является сжатие. Нажатие на устройство также приводит к изменению размеров жидкометаллических каналов. Изменение поперечной площади канала в этот момент может вызывать локальные изменения цвета путем локального изменения сопротивления (если ток постоянный, конечно).
Для проверки этого был проведен эксперимент, в ходе которого на устройство подавали ток 0.1 А и применяли давление в 100, 200, 300 и 400 кПа (временной интервал между нажатиями был 15 секунд) на площадь 1х1 см. Как и следовало ожидать, цвет менялся именно в месте применения давления.
Изначальный синий цвет переходил в пурпурный при давлении в 100 кПа, а потом проявлялся белый цвет при 200 кПа (видео ниже).
Демонсрация ответной реакции устройства на давление.
Далее ученые решили продемонстрировать как ток и ширина жидкометаллического канала влияют на изменение цвета во время сжатия. Для этого был изготовлен жидкометаллический канал длиной 50 мм, высотой 0.05 мм и шириной X мм (где X = 0.2, 0.3, 0.4, 0.5 и 1.0 мм). К устройству с каналом шириной в 1 мм был применен ток 0.1, 0.2 и 0.3 А, после чего изменение цвета было измерено как функция давления (2е). Диапазоны значений давления, в которых присутствуют пурпурный и синий цвета, увеличиваются с увеличением тока.
Исследователи отмечают, что в устройствах, продемонстрированы на 2d и 2е, имеется лишь один проводящий канал. Таким образом, нажатие на него приводит к локальному изменению сопротивление и увеличению плотности тока, так как ток должен проходить через сжатую область. Но можно создавать системы с несколькими каналами для прохождения тока. Эта концепция может быть использована для перераспределения энергии в цепи и выполнения простых логических операций без использования полупроводников.
Изображение №3
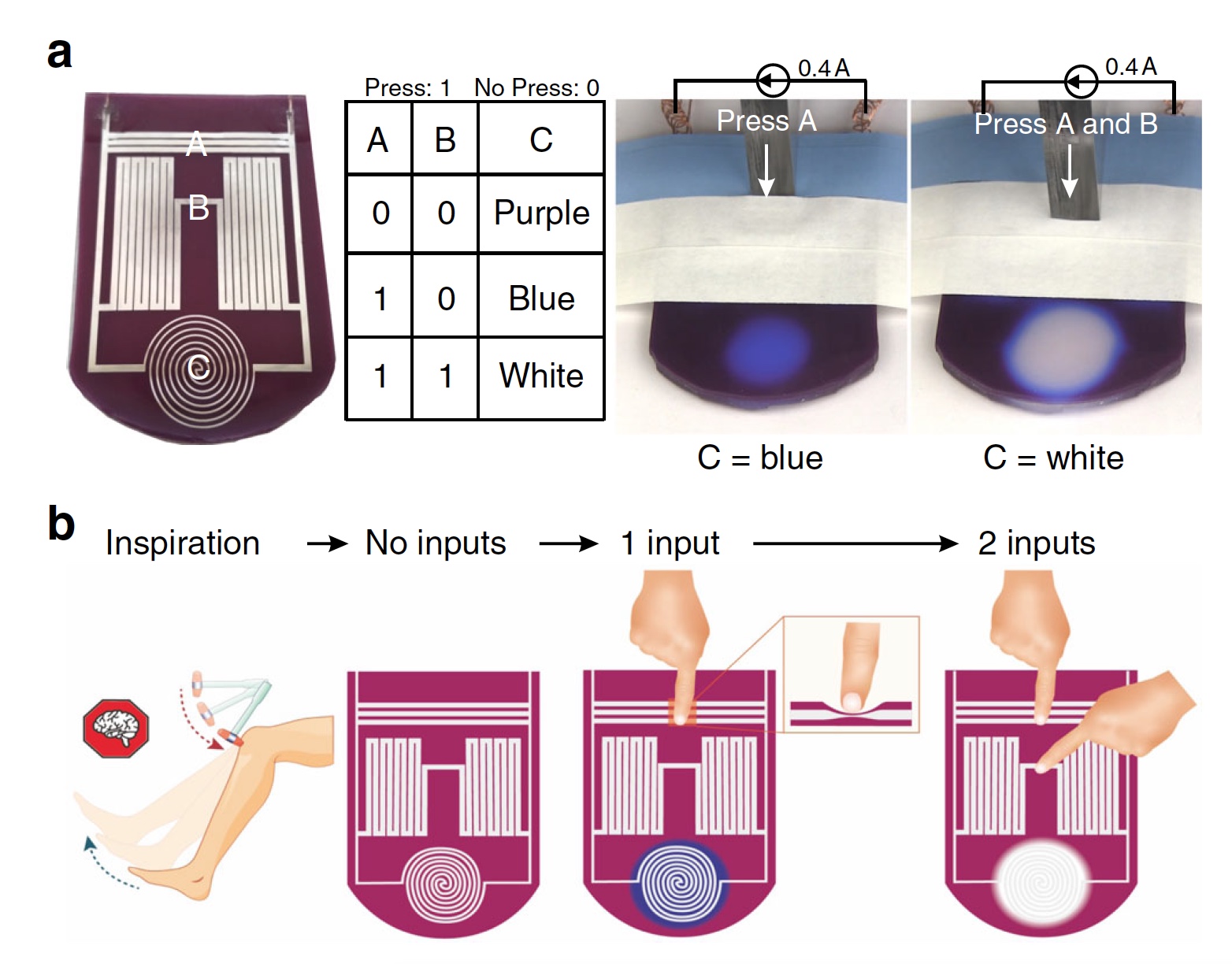
Для демонстрации этой концепции был изготовлен прототип (3а), состоящий из двух «входных» областей (А и В на изображении) и одной области «отображения» (С на изображении).
Входным сигналом в таком случае является давление. Подобно пороговому напряжению в транзисторе, существует пороговое давление, необходимое для индукции достаточного тока, чтобы вызвать изменение цвета в «области отображения». Следуя языку бинарной логики, значения давления выше порога называются «1», а значения ниже — «0».
На устройство подали ток 0.4 А и применили различные сигналы давления «1» и «0» в области A и B. В ответ на сигналы область отображения отреагировала изменение цвета (3b).
«Мягкая тактильная логика».
Эти изменения в цвете происходят из-за перенаправления электрического тока в область C на основе физического входа. Это простое устройство представляет собой NAND-подобную логическую операцию, хотя вывод усложняется тремя состояниями вывода, а не двумя.
Устройство с 10 параллельными каналами.
Данную концепцию можно расширить, создав параллельные каналы внутри устройства, что позволит перераспределять ток при нажатии.
Применение «мягкой тактильной логики» в электронных устройствах.
Кроме джоулева нагрева, перераспределенный ток может активировать те или иные элементы схемы (светодиоды на видео выше) или механические элементы (вентилятор на видео ниже).
Применение «мягкой тактильной логики» в механических устройствах.
Для более подробного ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В данном исследовании ученые продемонстрировали прототипы устройств, состоящие из эластомера с одним или несколькими проводящими каналами из жидкого металла. Использование подобных каналов позволило сохранить эластичность самого устройства. Была продемонстрирована концепция изменения цвета устройства за счет термохромных жидких кристаллов, реагирующий на изменение определенного показателя (или всех разом): ширина проводящего канала, степень деформации, ток и сопротивление.
Данное устройство до абсурдного простое и может выполнять определенные функции без участия центрального процессора, то есть на уровне самого материала. Однако, это лишь прототип, который в дальнейшем может быть усовершенствован и усложнен путем добавления дополнительных каналов и/или термохромных элементов, чтобы расширить спектр его возможностей и функционал. Изменение цвета не является единственным, что может делать устройство на базе описанной выше технологии. Эластомеры, оснащение жидкометаллическими каналами могут менять размер, положение, форму и т.д. Подобная технология может найти свое применение в таких областях как мягкой робототехнике и протезирование.
Децентрализация принятия решений для осьминога не в новинку, но для рукотворных машин — это пока что лишь будущее. Насколько это будущее далекое зависит от успешности подобных исследований.
Практические эксперименты с «мягкой» роботизированной рукой (надеюсь, крабик не сильно испугался).
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас оформив заказ или порекомендовав знакомым, 30% скидка для пользователей Хабра на уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2650 v4 (6 Cores) 10GB DDR4 240GB SSD 1Gbps от $20 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
Источник

