
На самом деле в различных работах при ликвидации последствий аварии на Фукусимской АЭС (я, пожалуй, буду писать для краткости дальше ФАЭС) применялись и применяются сотни единиц различных телеуправляемых роботов. Масштаб использования телеуправляемых машин несопоставимо больше, чем на ЧАЭС, по тем простым причинам, что вся эта техника здорово развилась за последние 30 лет и потому, что авария на ФАЭС, более масштабна, чем на ЧАЭС.
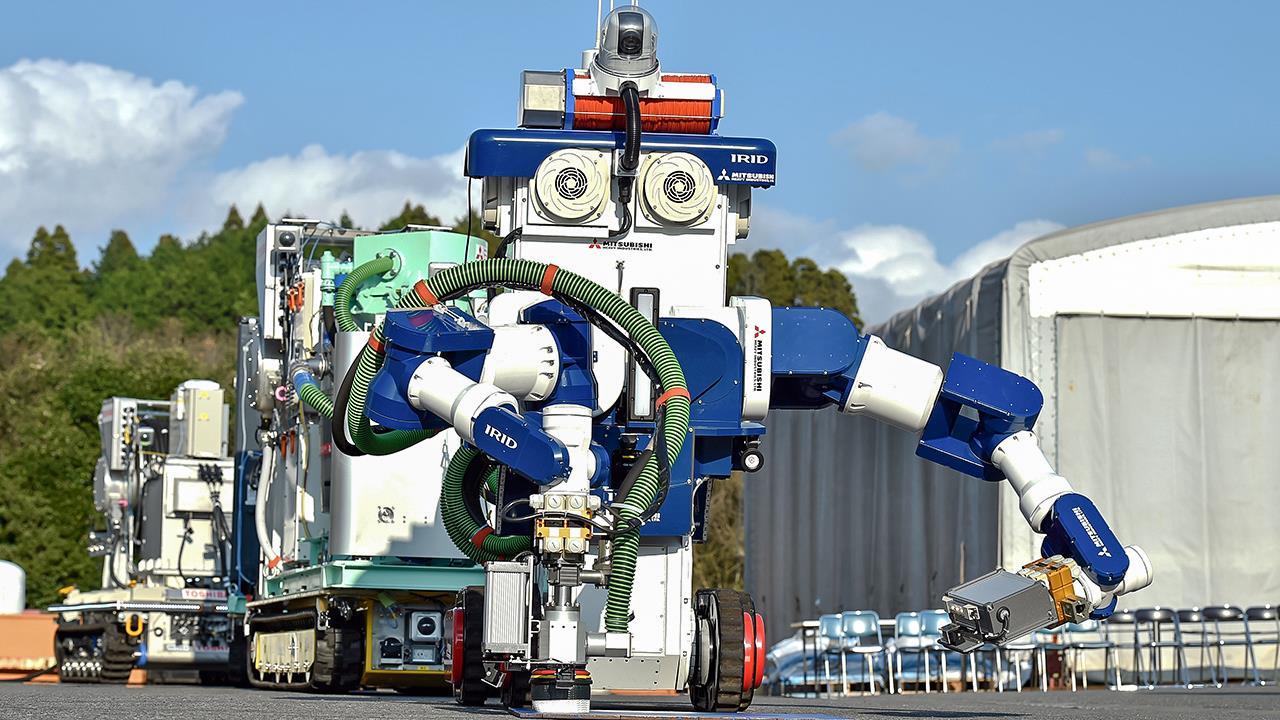
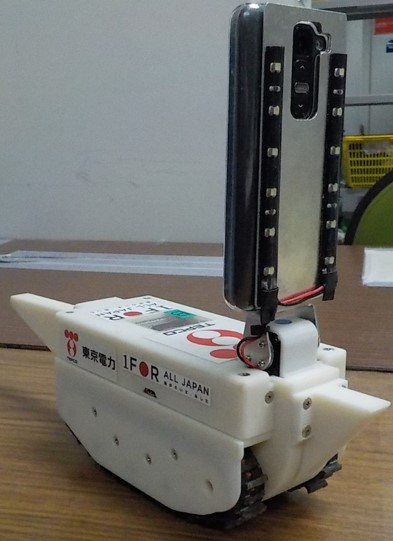
Робот-пылесос, японская версия для Фукусимы.
Прежде чем смотреть на роботов, стоит хотя бы в общих чертах представить, что за работы проводились на ФАЭС за прошедшие с аварии уже почти 6 лет.
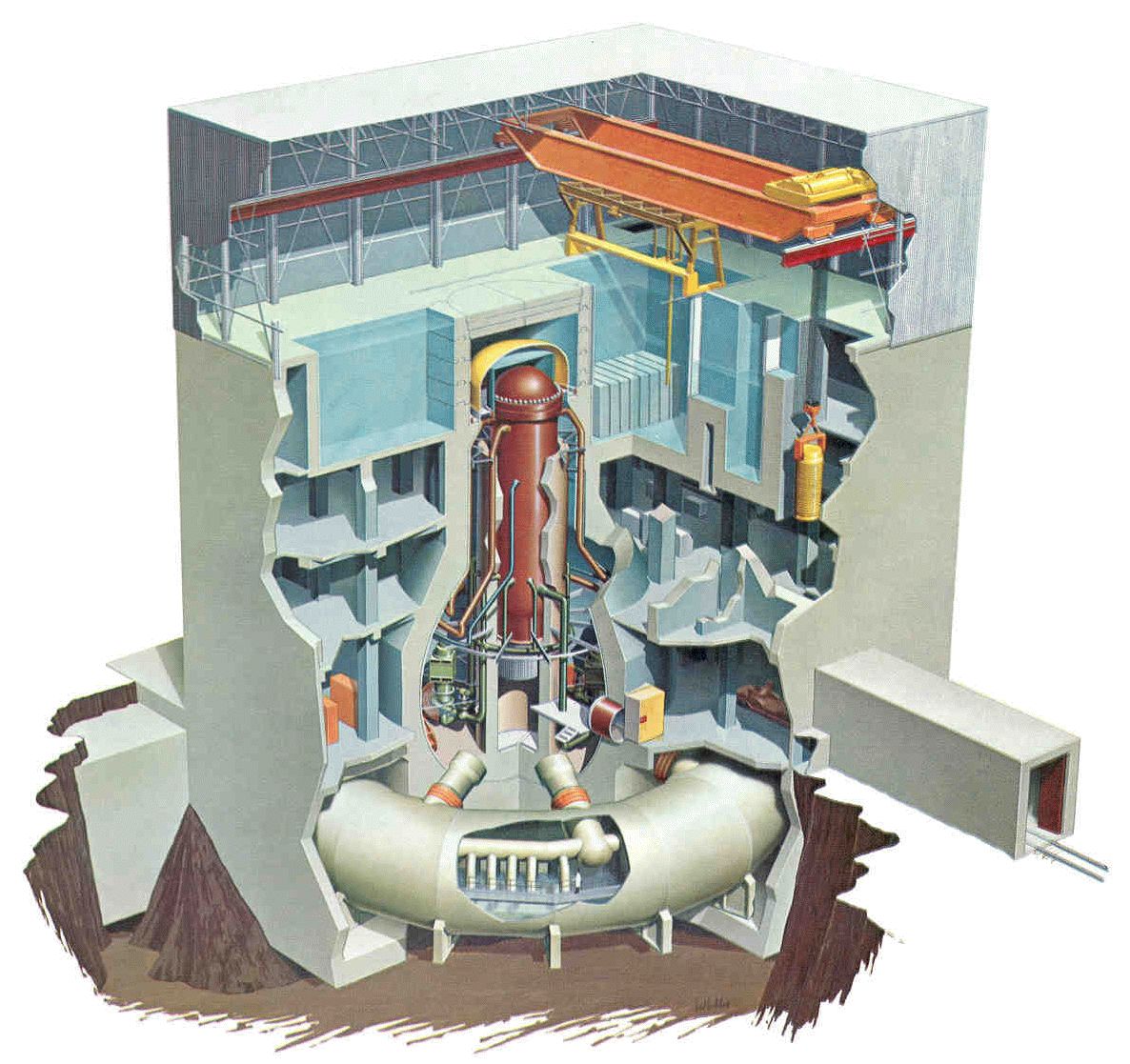
Общее представление о конструкции блоков Фукусимской АЭС дает эта упрощенная картинка: реактор здесь по центру (коричневый) располагается в цетре грушеобразного бетонного контейнемента, внутри которого довольно много оборудования. Сверху справа от реактора находится бассейн выдержки, прямо под реактором — помещение приводов стержней управления и защиты (в отличии от PWR, в BWR они вводятся в АЗ снизу). Снизу и вокруг реактора расположен торообразный бассейн-барботер, предназначенный для конденсации пара в случае крупного разрыва основного корпуса реактора.
После приведения реакторов блоков 1,2,3 в состояние “холодного останова” (т.е. охлаждения ОЯТ в реакторе до 100 С и ниже) в конце 11 года, были сформулированы такие задачи:
- Разведка радиационной ситуации в труднодоступных местах — корпусе реактора, контейнменте, торе-барботере и прочих, где к концу 2011 года еще не была известна ситуация (прежде всего с остатками расплавившегося топлива)
- Снижение ветрового и водяного выноса радиоактивности из реакторов — путем ликвидации утечек (в т.ч. пресловутая ледяная стена), закрытия панелями части стен зданий, сбор загрязненного мусора в контейнеры, где это еще не было сделано
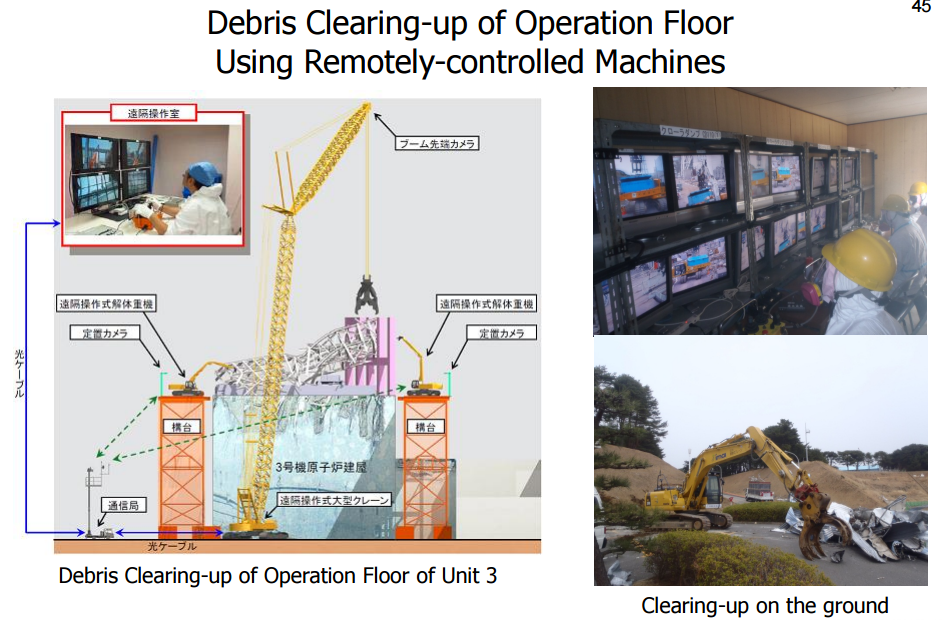
- Подготовка площадок для выгрузки ОЯТ из бассейнов выдержки всех 4 блоков — уборка разрушенных конструкций, картирование обломков в бассейнах выдержки и их уборка, организация временных сооружений над бассейнами, и наконец — выгрузка ОЯТ в контейнеры
- Максимальная деконтаминация сооружений (т.е. очистка от поверхностных загрязнений. Нужно это в основном в интересах работ по удалению ОЯТ — для снижения дозовой нагрузки персонала, который будет эту работу выполнять
- Герметизация контейнментов реакторов и последующая откачка радиоактивной воды из зданий энергоблоков
- Разборка высокорадиоактивных сплавленных остатков топлива (кориума) в 1,2,3 блоках
- После освобождения блоков от ядерно-опасных и радиационно-опасных предметов — разборка и организация “зеленой площадки”

Инфографика по состоянию блоков на начало 2016 года.
Весь этот план предполагается выполнить лет за 30-40, и самыми сложными тут является выгрузка ОЯТ из заваленных обломками бассейнов выдержки и уборка кориума из останков корпусов реакторов. В настоящий момент ОЯТ полностью выгружено из блока 4 (где, по счастью, его не было в реакторе, а только в бассейне выдержки — т.е. блок 4 можно превратить в зеленую лужайку уже достаточно скоро), и заканчивается возведение защитной оболочки для выгрузки ОЯТ из блока 3, планируется ее начать в 2017 году.
С блоками 1,2 ситуация наиболее тяжелая — тут для возведения укрытия для уборки ОЯТ необходимо сначала произвести разборку завалов и частичную деконтаминацию для снижения полей, чем TEPCO (владелец АЭС) сейчас и занимается.

Общий вид площадки фукусимской АЭС в 2016 году. Есть кстати, неплохой план, объясняющий все эти баки и некоторые здания.
Так вот, роботы участвуют абсолютно во всех работах, которые написаны выше. Да, разумеется, это все телеуправляемые машины, в основном кабельные, я не буду тут углубляться в терминологический спор, считать такую технику роботами, или только автономную, и буду называть их роботами.

iRobot Packbot 510 — первый из использовавшихся на ФАЭС.
С первых дней аварии, еще на активной ее части, встал вопрос радиационной разведки. TEPCO обладала некоторым парком роботов Packbot от iRobot — широкосерийной машиной, довольно удобной для подобных целей. На pakbot’ы ставили дозиметры (кажется это вообще одна из штатных опций), гамма-камеры, датчики давления, температуры, влажности, и посылали их в разрушенные взрывами блоки и вокруг них. К сожалению с передвижением по лесницам у pakbot’ов все плохо, и разведку они вели на первом этаже и за пределами блоков.

Апрельские тренировки на площадке ФАЭС с роботом iRobot warrior.
Через какое-то время к ним добавили несколько роботов (похожей конструкции) разработки центра FuRO и университета Чиба — Quince, Hibiscus, Sakura и т.п., по словам разработчиков, обладающих лучшим интеллектом/механикой при передвижении по сложной местности. И действительно, эти роботы уже в апреле-мае 2011 года позволили разведать верхние этажи блоков, два из них были потеряны из-за обрывов кабелей.

Quince на разведке внутри второго блока Фукусимской АЭС, апрель-июль 2011.
Кроме того для воздушной разведки и наблюдения использовался как минимум один дрон Honeywell T-HAWK, предоставленный японскими военными. Расщедрились военные и еще на несколько похожих на Pakbot и Quince гусеничных роботов Talon. Это более тяжелая и защищенная версия в идеологии Packbot.

Кроме разведки, практически мгновенно, в первые недели, для разборки завалов началось применение переделанной телеуправляемой строительной техники — нескольких экскаваторов, бульдозеров, грузовиков, которые успешно расчищали проходы между блоками от радиоактивных обломков.

Роботы, использовавшиеся для уборки радиоактивного мусора на блоке 3 в мае-июне 2011 года. В т.ч. два традиционных для атомной промышленности Brokk’а
Интересное применение нашлось и роботизированным бетононасосам Putzmeister — заливка водой блоков сверху ну и наблюдение с 70-ти метровой стрелы за ситуацией. Управление подобными машинами велось по радиоканалу из защищенных свинцовом мобильных помещений, которые устанавливались рядом с местом работы.

Телеуправляемый Putzmeister с 62-метровой стрелой, начало апреля 2011 года, задача — разведка и подача воды на верх разрушенного блока.
Думаю, что мгновенное появление такой техники на площадке ФАЭС связано с тем, что за последние лет 10 стало популярно добавлять в строительные машины возможность внешнего управления с пульта, т.е. по сути полностью электронное управление внутри, которое уже несложно вывести хоть на другое полушарие Земли. Имея такую технику достаточно обвешать ее камерами и снабдить правильным телекоммуникационным каналом и готов телеуправляемый робот. К сожалению, в 1986 году для достижения такого результата пришлось знатно помучатся, и по сути задача так и не была решена — быстрота в ликвидации последствий аварии оказалась важнее дозовой нагрузки людей.

Наконец, на площадке ФАЭС еще с 2011 применялась и стандартная для атомной отрасли радиационно-стойкая дистанционная техника: тяжелые (больше тонны!) роботы BROKK и манипуляторы на подвижных тележках Walischmiller — в основном опять же на разборке радиоактивного мусора, работы в самых “горячих” точках.
Как ни странно, специфических проблем, связанных с радиацией у всей этой техники не возникало — ну или это как-то замалчивается (что сомнительно). Впрочем, незащищенная робототехника использовалась в не высоких полях (не выше 15 рентген в час), а для более жестких условий на электронику иногда ставилась свинцовая защита (например на 3 телеуправляемых бетононасоса Putzmeister, которые стояли вплотную к разрушенным взрывами блоками и заливали воду сверху)

Радиационная обстановка на 23.03.2011 — через неделю после окончания активной фазы аварии. Самая большая цифра 130 мЗв — 13 Р/ч, сравните с ~1000 Р/ч на площадке ЧАЭС 6 мая.
Однако здесь надо отметить один важный момент. Серийную или полусерийную технику не стали отправлять в корпус реактора или на дно контейнмента, где впоследствии были измерены поля до 50000 р/ч. Для таких задач, и других специфических, типа деконтаминации больших объемов, разведки под водой, уборки обломков из бассейнов выдержки ОЯТ японские корпорации с 2011 повели разработку массы разнообразных механизмов, многие из которых вводятся в строй только сегодня. Давайте на них посмотрим:


Survey runner и FRIGO-MA
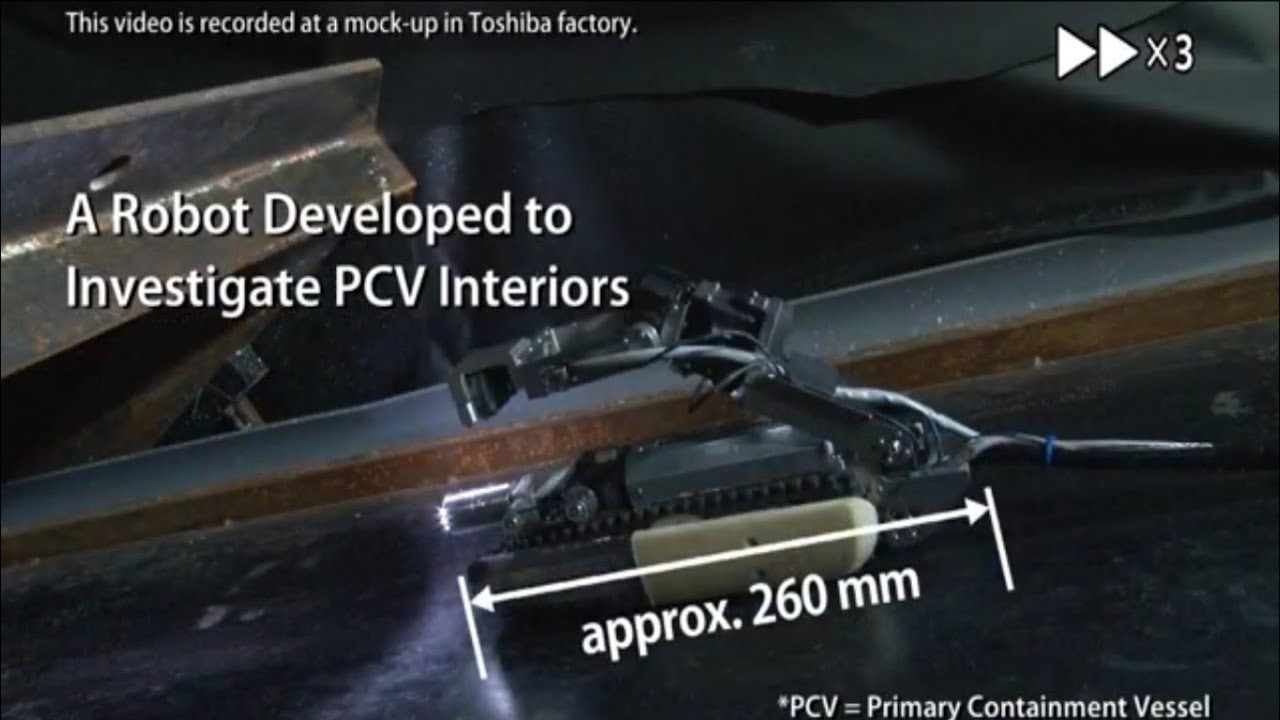
Начнем с более компактной версии кинематики Pakbot’a — Survey runner производства TOPY. Не очень интересный робот, тем не менее, залезший в самые подвалы блоков в 2012 году. Еще более мелкий вариант данной схемы под названием FRIGO-MA, а также странный четвероногий робот от Toshiba который мог выпускать отдельного плоского разведчика использовались для контроля протечки из трубопроводов обвязки реактора (довольно долго задача поиска мест утечек охлаждающей воды была крайне актуальна для ликвидаторов).
Еще более мелкий и прочный разведчик Scorpion разработала Toshiba — и этот робот прогулялся в барботеры и контейнементы реакторов (и вроде один из scorpion’ов стал первым растиражированным СМИ “умершим от радиации” роботом).
Отработка «Scorpion» на макете контенмента 2 блока. Интересно, что для отправки роботов было построено очень немало разнообразных макетов, довольно достоверно воспроизводящих многие элементы конструкций АЭС.
Кстати, к вопросу о мелких разведчиках. Мне понравилась фотография вот этого робота — догадайтесь что используется в качестве камеры

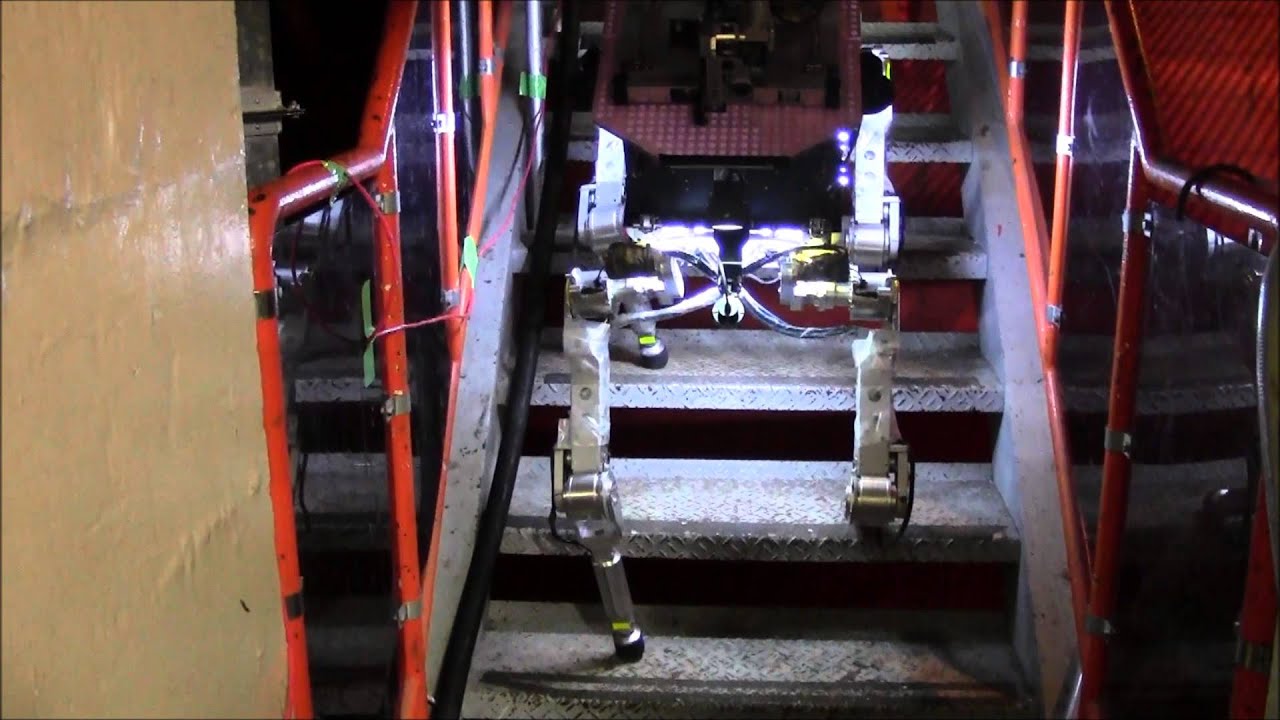
Конкурентом Scorpion от Toshiba стал Shape-changer от Hitachi — довольно распиаренная конструкция с интересной кинематикой. Два робота этой версии были отправлены в нижнюю часть контейнемента, провели разведку в полях ~500 р/ч (5 Зв/ч), обнаружили там брызги кориума.

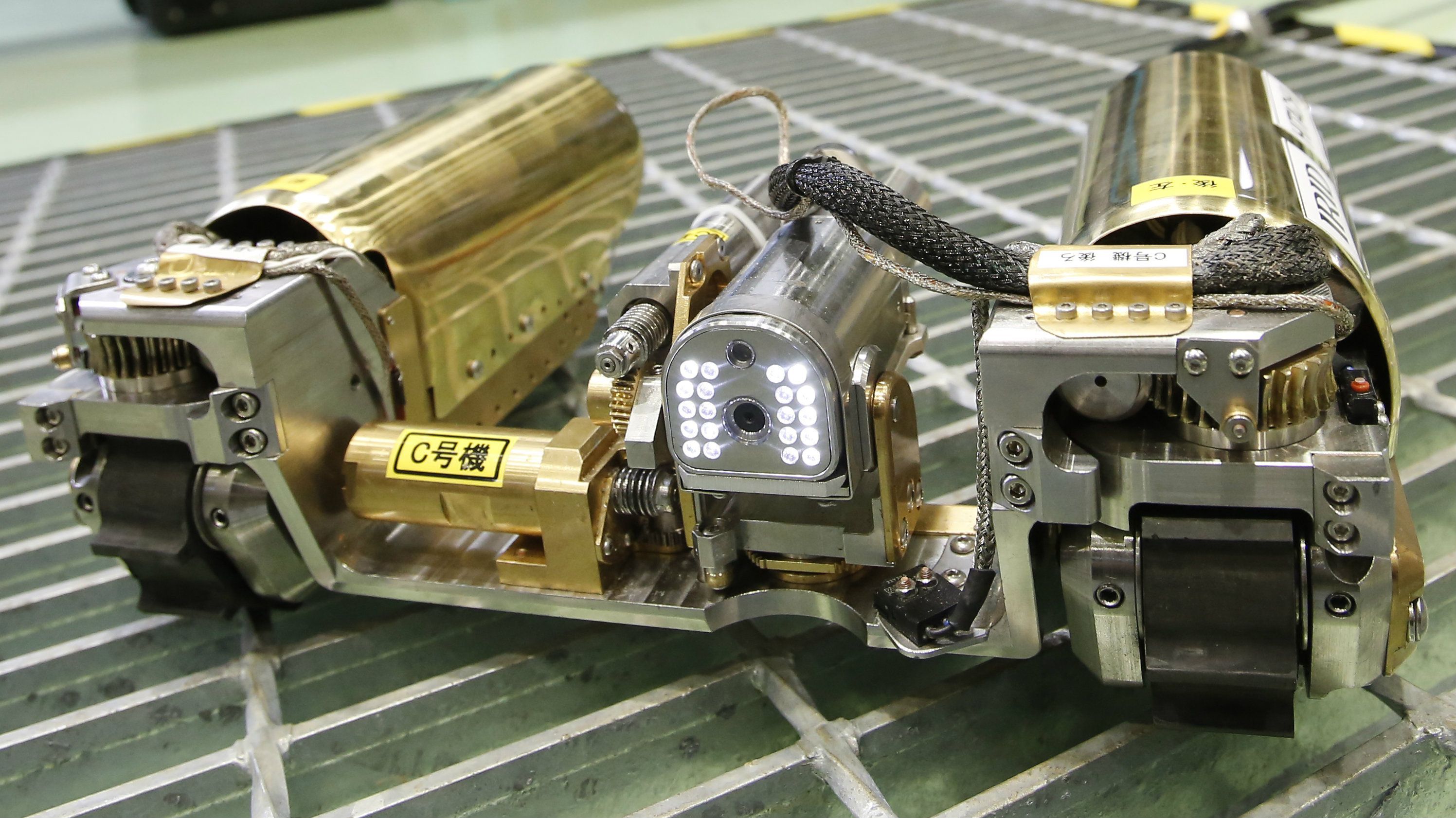

Именно они стали героем прошлогодней новости “TEPCO послало роботов в реактор, а они умерли от радиации” — на самом деле первый робот просто застрял, а вот второй, действительно наткнулся на кусок ОЯТ с полем 5000-8000 р/ч и у него отказала электроника (ирония судьбы тут в том, что срок “нахождения в сознании” у машины оказался очень похож на человека). Кстати, несмотря на смерть, эти роботы выяснили довольно важную вещь — в контейнементе блока 1 стоит на довольно высоком уровне вода, а значит он герметичен.
Видео, снятое одним из данных разведчиков.
Впрочем в отличии от человека, у инженеров есть возможность, столкнувшись с проблемой, попробовать ее решить, придумав новый вариант. Сейчас Toshiba испытывает версию все того же мелкого разведчика Scorpio, снабженного микробрансбойдом и микроножом для сталкивания кусков кориума. Вообще, новые машины все ближе приближаются к главной неразведанной области — местам проплавления корпуса реактора и контейнемента кориумом, и картирования расположения кориума под реактором в блоках 1,2,3.
На данный момент из не-дистанционных методов TEPCO удалось только опустить к кориумому радиационно-стойкую камеру на блоке №2 и измерить МЭД в 530 Зв/час (т.е. 53000 р/ч). Такая мощность дозы не позволяет надеятся, что задача разведки/картирования будет простой — существующая, даже радиационно-стойкая электроника становится слишком ненадежной в таких условиях, а экранировать ее в маленьком роботе невозможно.
Кстати, в рамках ИТЭР в Европе разрабатывают линейку радиационно-стойких микросхем (АЦП, ЦАП, цифровых интерфейсов, логика) примерно для таких условий работы. Еще один пример, как “безполезный” проект приносит конкретные плоды.
Заканчивая тему разведки надо упомянуть, что разведки для залитых водой подвалов TEPCO использовала несколько серийных подводных автономных роботов и одну небольшую телеуправляемую лодку.

Второй главной задачей для армии роботов TEPCO являлся и является разбор завалов, прежде всего в рамках удаления ОЯТ. Как я написал выше, изначально на ФАЭС использовали стандартные для атомной индустрии изделия BROKK и Walischmiller и телеуправляемую строительную технику. Однако фирмой Hitachi довольно быстро был разработан специальный BROKK-подобный (т.е. тяжелый гусеничный робот с автономным питанием от двигателя внутреннего сгорания) робот ASTACO-SoRa.
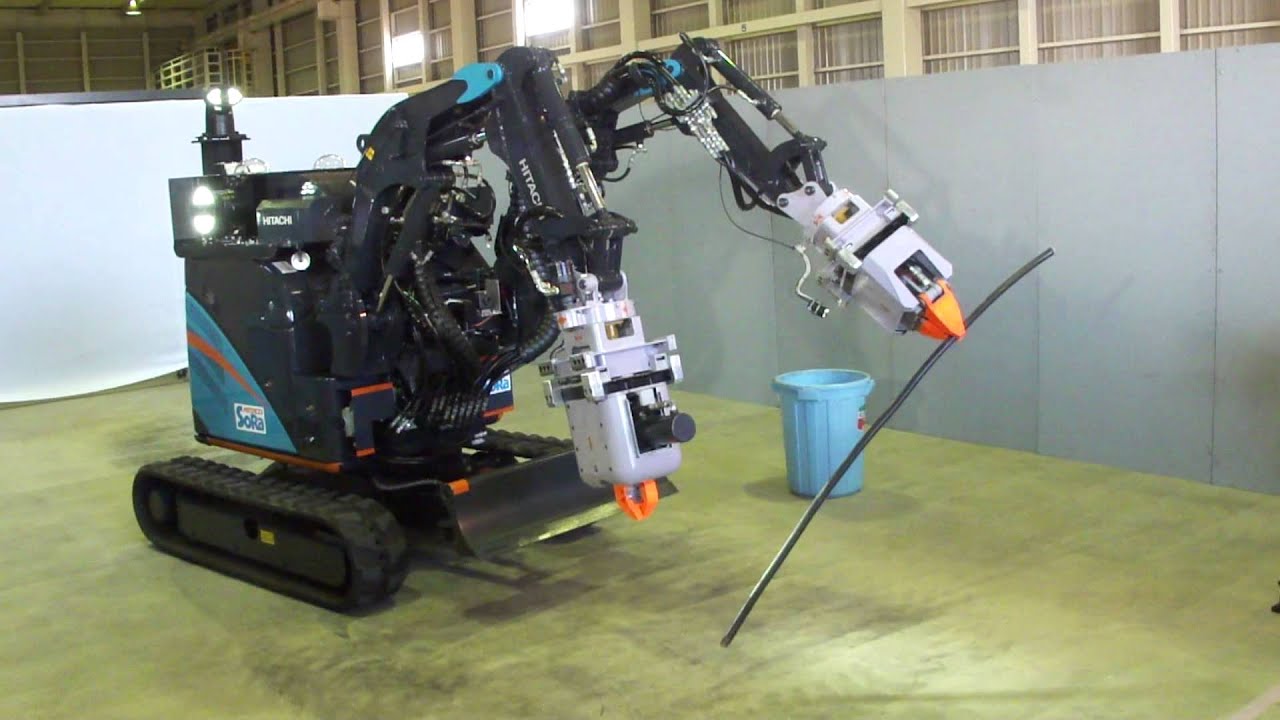
В облике ASTACO-SoRa есть что-то японского анимэ.
Его задачей была разборка завалов кабелей — сложный для стандартных манипуляторов демонтажных роботов объект, часто встречающийся на АЭС. Наряду с специальным ASTACO-SoRa и радиационно стойкими BROKK’ами применялись демонтажные роботы Husqvarna DXR-140, DX-250 и DX-310. Как, вы не знали, что husqvarna производит роботов-разрушителей?

Приемка Husqvarn в 2012 году на Фукусимской АЭС.
Зачем понадобились такие девайсы? Напомню, что в рамках основного на сегодня мероприятия, а именно извлечения ОЯТ из бассейнов выдержки приходится разбирать завалы вокруг бассейнов, достраивать укрытия, в общем подготавливаться. И не везде радиационная обстановка позволяет это делать людьми, так что обильное перекладывание этих задач на демонтажных роботов понятно, хотя темп работы падает довольно сильно.
Опять, в этой задаче, наряду со всякими неуклюжими и медленными роботами работает телеуправляемая строительная техника.
Кстати, насчет темпа, небольшое отступление. В 1986 году роботы двигались еще медленнее, были еще менее точными и надежными, а каждый день промедления с захоронением ОЯТ с крыши 4 блока ЧАЭС приводил к дополнительному выносу радионуклидов — ветром и водой. Именно поэтому, попытавшись повыполнять задачи уборки роботами, и убедившись что это слишком медленно, ликвидаторы аварии на ЧАЭС вернулись к реализации этой задачи людьми. Медлительность а также ненадежность робототехники стали основной причиной ее малого применения, а не радиация и “страшные условия”, как любят говорить разработчики тех роботов. В качестве пруфа приведу кусочек документального видео:

Однако вернемся к Фукусиме. Наряду с разборкой завалов и отгрузкой твердых радиоактивных отходов в контейнеры на загрязненных блоках была (и есть) еще одна неприятная задача — деконтаминация стен, полов, потолков и так далее — всех конструктивных элементов, которые нельзя просто убрать с места будущей работы. На этих поверхностях осели радионуклиды, выброшенные во время активной фазы аварии — где-то их можно смыть, а где-то надо сдирать. Хорошим вариантом является ледоструйная обработка — бомбардировка поверхностей частицами сухого льда (из СО2) с последующим отсосом на фильтр всего, что получилось. Однако сама система для подобной очистки довольно громоздка — для начала ее попробовали установить на тот же Husqvarna DXR-140 весом 985 кг, но результат получился не очень. Но мы же в Японии! Родине странных роботов! И результат превзошел все ожидания
Робопоезд о четырех тележках, первая из которых снабжена деконтаминационным манипулятором, а остальные везут систему генерирования сухого льда, пылесос, фильтры, разнообразные чистящие жидкости и т.п.
Вообще для задачи деконтаминации было создано порядка десятка специализированных механизмов, в т.ч. самые простые для очистки пола и самые странные — для очистки потолка. При этом, насколько можно понять, результаты не тестов, а реальной работы на блоках пока довольно скромные и больше похоже на те же тесты, только в реальной обстановке. В том числе, мегаробопоезд, показанный выше, пока (похоже) в блоки еще не запускали.

Деконтаминационная техника — манипулятор, установленный на конце телеуправляемой выдвижной лестницы?
Еще один примерчик странной деконтаминационной машины.
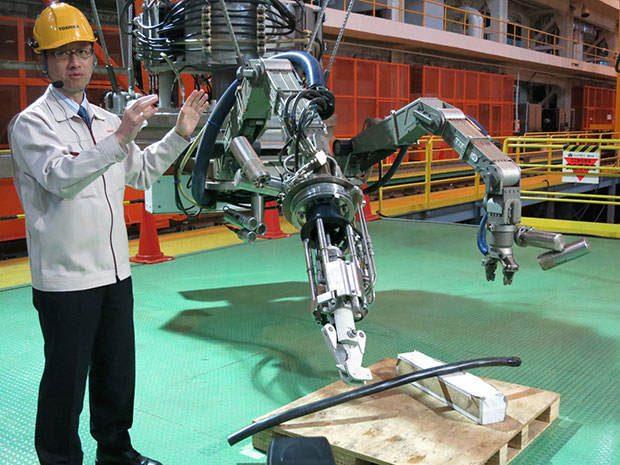
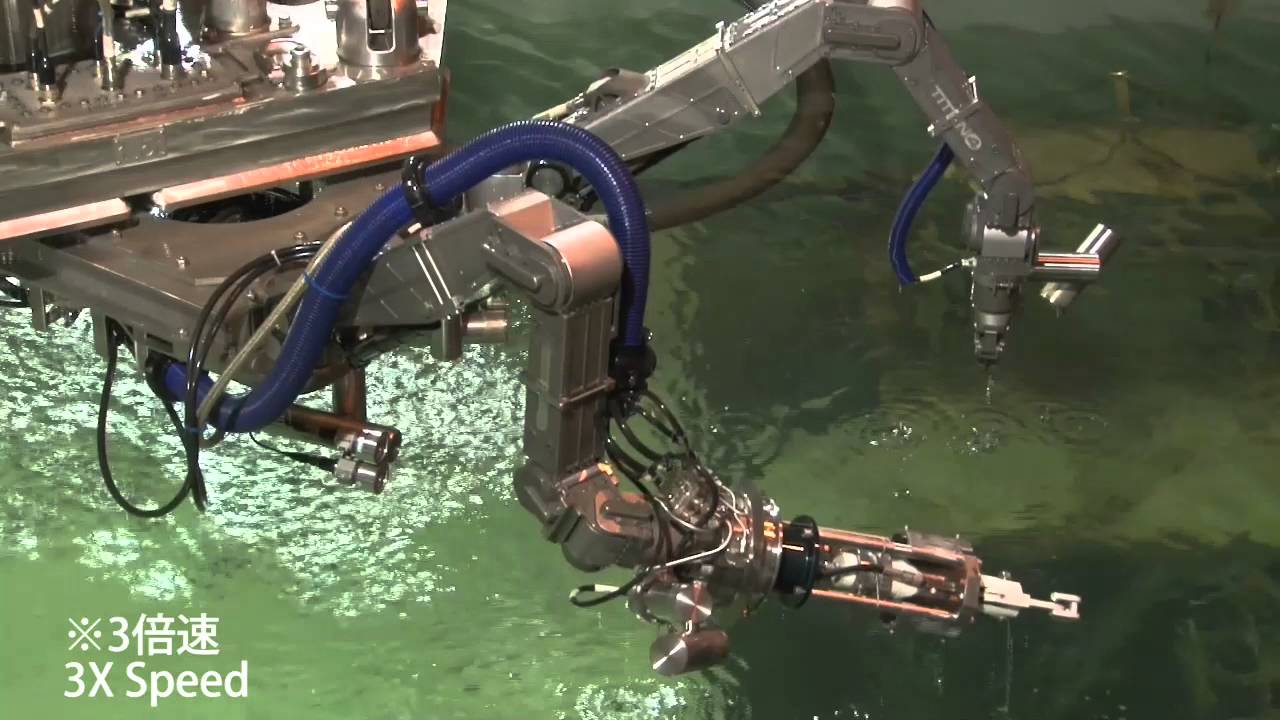
Наконец, последней важнейшей задачей для которых японцы проектируют телеуправляемых роботов, является расчистка бассейнов выдержки. Эта задача наиболее сложна, т.к. тут кроме неустойчивых конструкций в мутной воде дело приходится иметь с большими радиационными полями (особенно подбирая мусор с стеллажей с ОЯТ) и опасностью возникновения вспышек цепной реакции — допустим если уронить одну ТВС на другие, это вполне возможно.

Видео, снятое подводным аппаратом в бассейне выдержки третьего блока. Под этим мусором находится несколько сот тонн ОЯТ!
Для решения этой задачи создан немаленький комплекс из подводного телеуправляемого робота с двумя манипуляторами, подвешенного на мостовом кране и разнообразных подъемных устройств. TEPCO собирается уже в 2017 году начать применять этот комплекс при расчистке БВ на третьем блоке, где в 2018 должна начаться выгрузка ОЯТ.
Подводя итог, хочется отметить следующее:
1. Ликвидация последствий аварии на Фукусимской АЭС стала местом массированного применения телеуправляемой техники, в основном в задачах разведки и картирования.
2. С задачами собственно ликвидации (и разведки в сложных местах) имеющиеся серийные роботы справляться не очень. За два-три года после аварии было разработано множество новых вариантов техники — видно что идет поиск форм, удачных и эффективных для работы в условиях радиационных аварий на промышленных объектах. Всего, кстати, я насчитал 43 типа телеуправляемых машин, попавших в кадры отчетов TEPCO.
3. Работа телеуправляемыми машинами идет гораздо медленнее, чем с помощью людей. Это известная проблема, и она связана с как с ущербной кинематикой и подвижностью самих роботов, так и с трудностью восприятия обстановки оператором через отдельные камеры: вторую проблему сегодня пытаются решать с помощью дополненной и виртуальной реальности, однако до ФАЭС такие модные навороты пока не дошли (но активно применяются в разработках в университетах).
P.S. По непонятной мне причине некоторые ролики не подцепляются, если кто-то может что-то посоветовать — советуйте.
Источник

