
В Гарварде создали мягкий роботизированный манипулятор для эндоскопической хирургии
Гибкие эндоскопы созданы для того, чтобы забираться в самые труднодоступные места организма человека. Не любопытства ради — а для пользы пациента. Но чтобы ни увидел хирург, используя эндоскоп, извлечь это что-то или отрезать при помощи того же эндоскопа он не может. Поэтому приходится заходить с другой стороны, и в прямом и в переносном смысле, забираясь в организм человека через разрезы на его теле.
Группа ученых из Гарварда решила совместить эндоскоп с роботизированной рукой, чтобы получить возможность проводить операции прямо «на месте», если так можно выразиться. У манипулятора есть несколько режимов свободы, а также возможность удалять определенные объекты или ткани. Манипулятор скрывается в эндоскопе, пока тот идет к цели. И как только нужное место достигнуто, наступает роль роборуки. 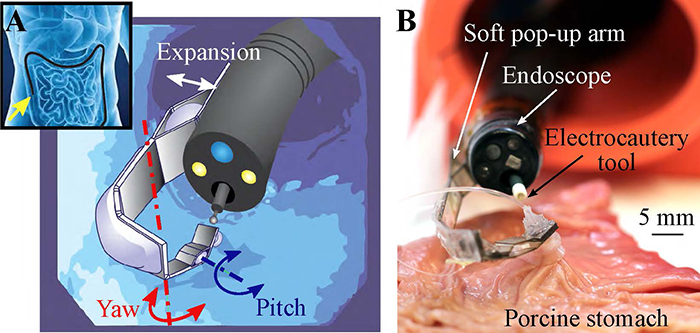
Иллюстрация к описанию концепта манипулятора и фотография самой роборуки. Справа манипулятор проводит операцию прямо в желудочно-кишечном тракте. Это лишь «полевые испытания», но все же выглядит впечатляюще
Вообще говоря, мягкие роботы находят свое применение во многих отраслях науки, техники, медицины. Особенности их конструкции таковы, что медик (ведь речь сейчас о медиках) могут использовать их с высокой степенью эффективности внутри тела человека. Правда, возможности роботов ограничены.
«На миллиметровом уровне мягкие устройства действительно становятся мягкими, так что они не могут повредить какую-то ткань, но и не могут проводить операции с этой тканью. Это ограничивает область применения мягких микросистем для выполнения медицинских работ. Вопрос в том, сможем ли мы создать мягких роботов, которые смогут развивать достаточные усилия, не угрожая при этом безопасности», — комментирует ситуацию Томаццо Ранцани, один из разработчиков проекта.
Команде удалось создать рабочую модель манипулятора, используя достаточно прочный и упругий «скелет», окруженный мягкими материалами. Ученые говорят, что при создании своей роборуки они руководствовались принципами создания оригами — фигурок из бумаги. Как и говорилось выше, манипулятор может добираться до цели, там принимать совершенно другую форму, выталкивая, собственно, манипулятор. После этого хирург может проводить нужные ему операции.
Для приведения всей системы в движение ученые решили использовать актуаторы, которые работают на воде. Они соединяются с прочными компонентами скелета при помощи химических связей, так что дополнительные клеевые крепления (или крепления других типов) не нужны. Есть в списке инструментов манипулятора и присоска, которая работает по тому же принципу, что и присоски у головоногих моллюсков. Тестовую операцию ученые провели в искусственном пищеводе, используя ткани свиньи. Эксперимент прошел удачно, манипулятор, не повредив нежную ткань, выполнил операцию, все сделано в лучшем виде.
Последняя версия манипулятора оказалась способной проводить операции с миниатюрными объектами, размер которых не превышает нескольких миллиметров. Кроме прочих элементов, роборука оснащена сенсором обратной связи, чтобы хирург, проводя операцию или обследование больного, мог получать представление о необходимом для выполнении какой-либо процедуры усилии. А это может стать одним из условий успешного проведения операции.
В дальнейшем специалисты планируют провести операцию уже в реальных условиях, но, скорее всего, не на человеке, а на животном. «Наша технология позволяет разрабатывать мягких роботов небольшого размера, которые нужны в медицине».
Мягкие роботы нужны не только в медицине, но и на производстве. Относительно недавно ученые из Научно-технического университета Китая показали мягкий пневматическй манипулятор, который внешне напоминает гусеницу. Кстати, эта система также была разработана совместно с учеными из Гарварда.
Робот такого типа умеет захватывать и переносить различные объекты, причем даже тяжелые, следовать за указкой и выполнять другие задачи. В будущем китайцы планируют обучить своего робота не только захватывать, но и использовать инструменты, передавая их на определенное расстояние.
Источник
Похожие статьи
 Что делать, если человек говорит о смерти: личный опыт работы на телефоне доверия в ситуациях острого кризиса
Что делать, если человек говорит о смерти: личный опыт работы на телефоне доверия в ситуациях острого кризиса Эволюция самых нелепых карманных гаджетов
Эволюция самых нелепых карманных гаджетов Почему идеальная настройка светофоров невозможна: дело не в алгоритмах
Почему идеальная настройка светофоров невозможна: дело не в алгоритмах Обратноходовый дроссель: наглядная демонстрация
Обратноходовый дроссель: наглядная демонстрация Зонд НАСА «Юнона» измерил температуру на вулканическом спутнике Юпитера — Ио
Зонд НАСА «Юнона» измерил температуру на вулканическом спутнике Юпитера — Ио Оцениваем навыки команды: 12 вопросов по TypeScript и React
Оцениваем навыки команды: 12 вопросов по TypeScript и React Экстремалы природы: кто выживает в самых суровых уголках планеты
Экстремалы природы: кто выживает в самых суровых уголках планеты Эффективны ли стволовые клетки в косметике и еде: научный подход или маркетинговый обман?
Эффективны ли стволовые клетки в косметике и еде: научный подход или маркетинговый обман?