Инженеры, создававшие прототип, демонтировали башню, установили на танк дозиметр, температурный датчик, осветитель. Танк был оснащен дистанционным управлением, которое осуществляли по электрическому кабелю, таким же образом получали данные с установленных инструментов. С первых же вылазок танк показал себя очень полезным для радиационной разведки: запуская его вперед людей, можно было осмотреть конструкции и измерить уровень радиоактивного загрязнения оперативно и без лишнего риска для ликвидаторов. Кроме того, машина оказалась очень маневренной и проходимой из-за своих малых габаритов, пролезая среди завалов в самые небольшие и неудобные проходы, а пластмассовый корпус легко поддавался последующей очистке и дезактивации.
Танк был игрушечным, и это был один из самых удачных роботов, созданных и примененных на аварийной станции.

Невеселые игрушки
Есть такой интернет-мем: на первый взгляд безобидные картинки с подписью «Когда заметите ЭТО — обделаетесь от страха».
На фото выше (ссылка на источник и автора) все кажется симпатичным: красный, с виду игрушечный экскаватор — мечта детства; такой же самосвал: вроде игрушечного, но большой и серьезный; между ними — серебристый луноход. Наверное, это игровая площадка какой-нибудь школы или летнего лагеря, а БТР на заднем плане — ну, для патриотического воспитания.
Но нет. Той самой «пугающей деталью» на фото является небольшой треугольный знак радиационной опасности перед самосвалом. Это — экспозиция небольшого музея техники, принимавшей участие в ликвидации аварии, и знак красноречиво показывает, почему экспонаты нельзя трогать руками.
Бытует мнение, что при попытках использовать роботов они все очень быстро вышли из строя, от них предпочли отказаться, и аварийную станцию стали чистить «голыми руками», то есть, ценой здоровья и жизни многочисленных ликвидаторов. На самом деле это очень спорное утверждение, причем спорят между собой непосредственные участники тех событий. Действительно, непосредственно при работах по тушению, очистке крыши, дезактивации и разбору завалов роботы не смогли полноценно заменить собой людей. У них были свои серьезные минусы вроде проблем с преодолением завалов и пыления при передвижении. Однако их вклад все же был существенен — с пресловутой кровли 3-го энергоблока за два месяца было убрано полсотни тонн липкого битумно-рубероидного покрытия, сорбировавшего на себя радиоактивную пыль в огромных количествах, и немного меньше — графитных осколков, второго по опасности материала реактора после ТСМ — топливосодержащих материалов, как называли керамику или лаву из застывшего расплава бетона и ТВЭЛов. В дальнейшем, когда речь стала идти о консервации, мониторинге состояния разрушенного энергоблока и работах внутри «Укрытия» — то есть, когда уже не было нужды в экстренном и опасном труде сотен людей одновременно — настало время роботов.
Разве не нипочем?
Контринтуитивным кажется тот факт, что металлические неодушевленные роботы страдают от радиации. Но на самом деле это так: выход из строя электронных компонентов под действием радиоактивного излучения происходит намного быстрее, чем то же самое излучение выводит из строя живой организм. Маленькие смертоносные снаряды будут долго бомбардировать человека снаружи и изнутри (с проглоченной или вдыхаемой пылью либо от нейтронного наведения) прежде, чем наступит мучительная смерть; а вот электроника, будучи в пределе двоичной логикой, сразу отказывает при самом небольшом, но критичном нарушении.
Конечно, в условиях длительного малоинтенсивного облучения в выигрыше будет робот. Но при сотнях и тысячах рентген в час на краю обрушенной кровли Чернобыльской АЭС в нем будет очень быстро выходить из строя самое слабое его звено: полупроводники. Полупроводники — это и микросхемы, и самые простые транзисторы, которые страдают от облучения ровно по той же причине, что и работают сами: перемещение носителей заряда в полупроводниковом материале нарушается радиоактивными носителями заряда, пробивающими корпус робота.
Под смертельным ливнем заряженных частиц реализуются два основных механизма повреждения электроники.
Во-первых, нейтроны, протоны и альфа-частицы повреждают кристаллическую решетку полупроводника, заменяя атомы на изотопы или даже другие элементы, вызывая локальные дефекты. Это сильно влияет на подвижность носителей заряда, количество рекомбинаций, а также на свойства p-n перехода в транзисторах. Интересно, что кратковременное высокоэнергетическое облучение вызывает «эффект отпуска», названный по аналогии с закалкой металла: решетка немного восстанавливается по сравнению с деградацией, наносимой непрерывным, но менее мощным излучением. Тем не менее, для биполярных транзисторов этот фактор становится основной причиной потери выходных характеристик.
Во-вторых, частицы с меньшей энергией, чем требуется для атомных замен в кристаллической решетке, вызывают эффекты ионизации. Это выливается во всевозможные электрические помехи, наведенные шумы, фотоэффект и ошибки передачи сигнала в оптронах, деградацию МОП-транзисторов, а также сбои в работе программного обеспечения.
Особняком из всех видов облучения стоят нейтроны, способные и к указанному выше взаимодействию с ядрами атомов в кристалле, и к генерации вторичной радиации — «шрапнели» от столкновений с материалом. Наиболее чувствительны к ним биполярные транзисторы, ведь проникая в кристаллическую решетку, нейтроны могут создавать в ней «глубокие ловушки», то есть, места с аномально большой запрещенной зоной — энергией для перевода носителя заряда на уровень проводимости. Они выдерживают плотность потока до порядка гиганейтронов на кв. см, КМОП-схемы — петанейтронов на кв. см. В общем случае КМОП-микросхемы могут выдержать дозу до 100 Грей радиации. Для сравнения, смертельной дозой для человека является около 5 Грей, а учитывая, что Грей — это количество джоулей радиации на кг массы и разницу масс микросхемы и человека, это выглядит совсем неплохо. До тех пор, пока робот не попадает под действие тысяч рентген в час. Но существуют технологии, позволяющие на порядки поднять устойчивость полупроводникового кристалла к излучению, например, выращивание его на сапфировой подложке. Возможно также и схемотехническое, и логическое (увеличение количества контрольных битов) повышение надежности электронных систем.
Клин
Поначалу роботы работали параллельно с людьми-ликвидаторами. И на земле, и на крыше станции, где грунт либо рубероидный настил и бетонная крошка были перемешаны с настоящими минами в виде обломков графитной сборки и топливных элементов, необходимо было в кратчайшие сроки провести работы по дезактивации.
Одними из первых вступили в работу дистанционно управляемые комплексы производства ВНИИ-100 (ныне «ВНИИТрансмаш»). Уже 18 мая от главного конструктора Александра Леоновича Кемурджиана, срочно доставленного в зону бедствия, на правительственной комиссии потребовали: «Вы сделали стране Луноход, управляемый дистанционно — поставьте его на крышу, чтобы он ее чистил!». В ответ на раздраженные возражения, что Луноход для данных задач не приспособлен, Кемурджиан получил еще более категоричный ответ: «Тогда сделайте нам новую машину!»
Новые машины были сделаны в очень короткие сроки. В первую очередь, за всего 44 дня был создан «Клин-1». Это был расчет из двух гусеничных машин: грейдера Объект 032, созданного на базе инженерной машины разграждения ИМР-1 с дополнительным дезактивационным оборудованием, экранированием и системой радиоуправления, а также машины управления Объект 033 на базе танка Т-72.
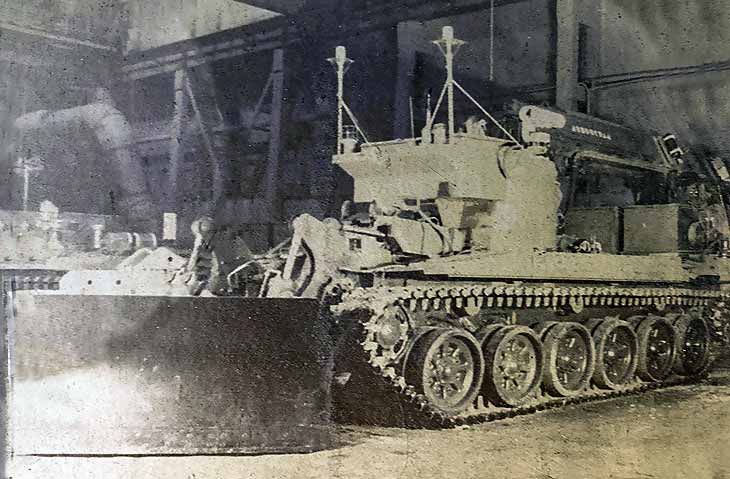
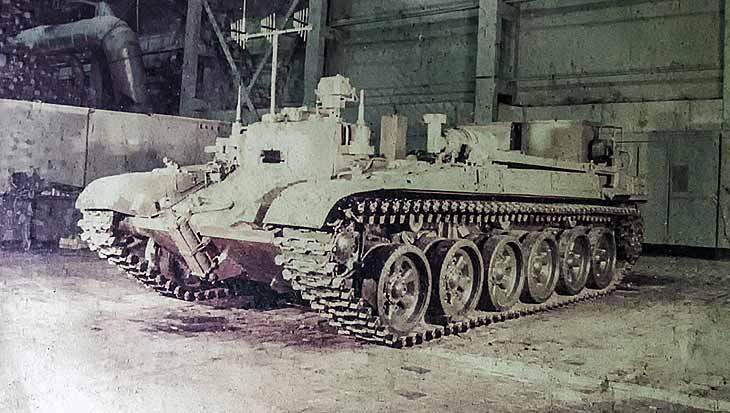
Сверху вниз: Объекты 032 и 033. Машина управления была обитаемой и находилась в безопасном месте, в то время как радиоуправляемый бульдозер-дезактиватор работал в самой опасной зоне. Всего комплекс помог снять, загрузить в вагоны и вывезти почти 1,5 тысячи кубометров зараженного грунта
«Луноход» тоже был сделан. «Клин-2», более известный как «СТР-1» или специализированный транспортный робот, оказался наиболее результативен в плане очистки крыши 3-го энергоблока.
Машина весом почти в тонну доставлялась на кровлю вертолетом или краном, а после работы заезжала на специальную платформу и перемещалась тем же путем обратно на землю для дезактивации и подзарядки. Инженеры серьезно подошли к ходовой части, чтобы робот как можно эффективнее передвигался по липкому от жары (а чтобы не допустить размыва радиоактивных загрязнений по большой территории со сточными водами от ливней, над районом долгое время кружили «Тушки» с зарядами йодистого серебра) битумно-рубероидному покрытию. Нужно было, чтобы битум не прилипал к колесам, и в то же время чтобы колеса хорошо за него цеплялись, удаляя его с кровли вместе с вплавленным радиоактивным мусором. С этой задачей две машины СТР-1 справились, очистив к концу сентября более 3000 кв. м кровли.
Радиационная устойчивость компонентов проявилась, во-первых, в наследовании технологий космической техники — опыт разработки компонентов, защищенных от действия космических лучей, уже имелся. Во-вторых, использовались безотказные способы управления: в самой схемотехнике по-максимуму использовались релейные сборки, а дистанционное управление шло по защищенным радиоканалам.
Помимо ВНИИ-100 на аварии работали машины Ленинградского ЦНИИ РТК. Их было больше разных типоразмеров, но они подвергались существенной критике за плохую управляемость, выходы из строя, медлительность. В рамках данной статьи, родившись после описываемых событий и не являясь специалистом, я не возьмусь что-то строго утверждать. Из найденных мной источников сын Кемурджиана в своей лекции к 30-летию аварии говорит о примерно 1000 человек (имеются в виду рабочие смены, эквивалентные набору одной допустимой разовой дозы для ликвидатора), которых заменил СТР-1. Валерий Стародумов в выпущенном тогда же телефильме говорит о 800 человек, потребовавшихся для обслуживания вышедших из строя роботов. Я же просто порекомендую вам самим посмотреть оба источника, они весьма интересны.
ДУСА
Дистанционно управляемые самоходные агрегаты появились уже после разбора завалов и постройки объекта «Укрытие». Они решали другие задачи — исследование состояния конструкций, поиск топлива (поначалу никто не знал, что в бывшей активной зоне реактора не осталось графитной сборки и топливных элементов — все расплавилось и протекло в подреакторное пространство) и особо зараженных мест.
После возведения «Укрытия» поначалу никто не использовал роботов — исследование помещений успешно велось путем бурения скважин и внедрения зондов с необходимыми датчиками для разведки. В дальнейшем, когда первичная разведка дала основные данные о местоположении топливосодержащих материалов (ТСМ) и состоянии конструкций, роботов начали активно разрабатывать и применять для получения новых данных и телевизионной картинки с места работы.
Требования, предъявлявшиеся к готовым машинам, были следующими. Помимо радиационной защиты, требовалась влаго- и пылезащита. Под «Укрытием» сохранялся влажный климат, а радиоактивная пыль требовала укрывать роботов специальной тканью для облегчения дезактивации. Надежность и проходимость обеспечивалась унификацией узлов, шасси, уменьшением размеров, применением независимой подвески колес тележки. Дистанционное управление и прием сигналов велись по кабелю — радиосигнал глушился бетонными конструкциями станции.
На базе стандартных шасси создавались роботы для следующих задач:
— Дезактивация. Робот заезжал в помещение, распыляя там с помощью шланга и форсунки дезактивирующий раствор и затем нанося противопылевое покрытие на стены, потолок и пол.
— Отбор проб бетона. Создавались роботы с манипуляторами, позволявшими бурить стены и образцы застывшего расплава топлива и конструкций для сбора проб с целью последующего анализа.
— Телевизионная разведка. Для оценки разрушений, причиненных взрывом, а также для производства многих работ, в том числе и другими ДУСА, были созданы специализированные машины наблюдения со смонтированными на них мощными источниками света и телекамерами.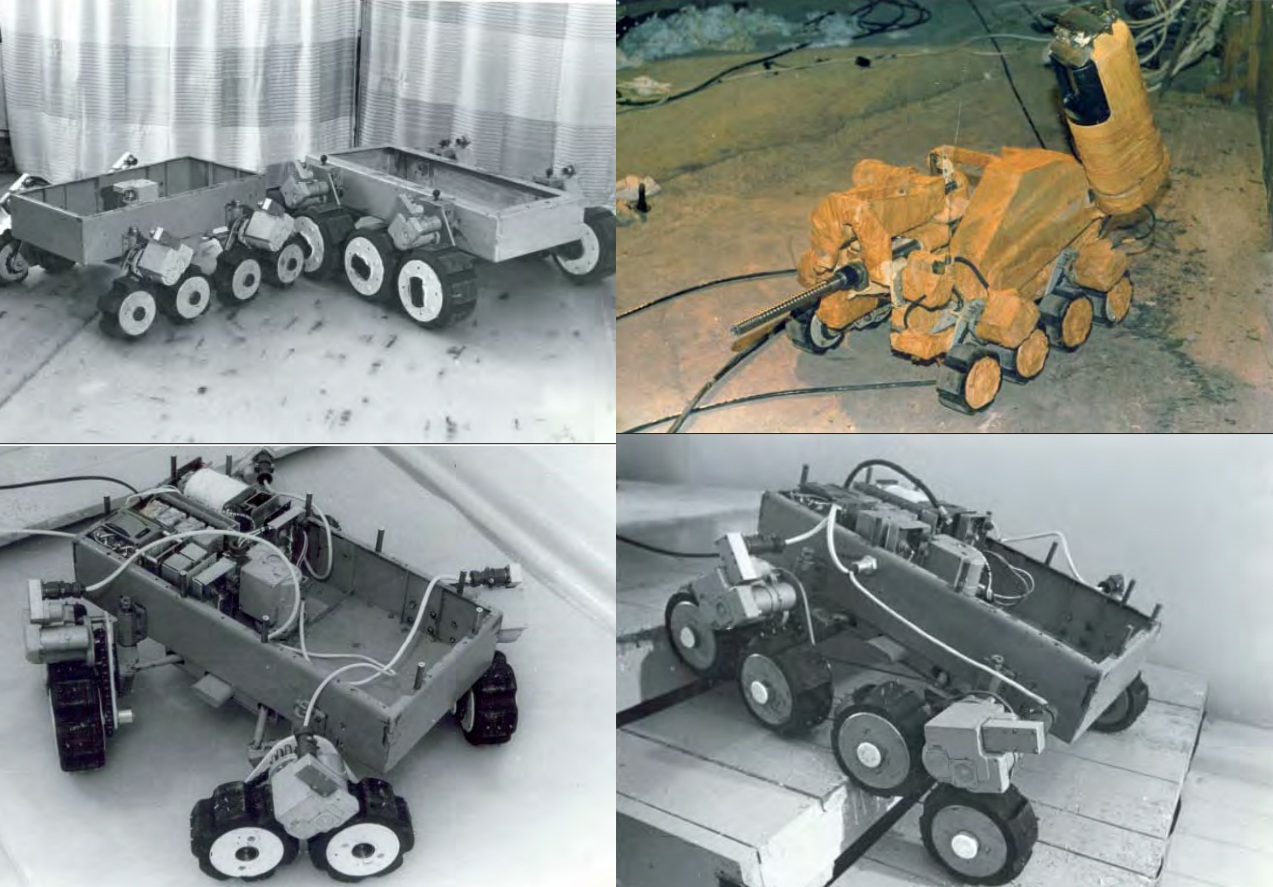
Тележки ДУСА на испытаниях. Обратите внимание на изолирующую ткань. Источник фото здесь и ниже
Интересными примерами являются также роботы с особыми способами перемещения. В полностью разрушенной зоне энергоблока были проложены рельсы, по которым перемещался ДУСА. Передвигаясь в воздухе над колоссальными разрушениями, непроходимыми для любого вида техники, робот с телекамерой позволил очень подробно картировать и степень повреждения помещений и конструкций, и местоположение радиоактивных обломков.
Совсем экзотической машиной был магнитоход. Он был создан для проведения работ на стенах и потолках помещений, имеющих плакировку, способную намагнититься. Ходовые узлы робота содержали мощные самарий-кобальтовые магниты, позволявшие роботу, двигающемуся по этому покрытию, нести значительный вес. Сдвоенные колесные блоки увеличивали надежность зацепления при преодолении сварных швов и фрагментов немагнитных покрытий. В 1990–91 гг. магнитоход был испытан в лаборатории и применялся на «Укрытии» для установки тепловых датчиков в помещениях парораспределительного коридора. При подготовке к проведению работ по стабилизации конструкций «Укрытия» он измерял дозовые поля на северной контрфорсной стене:
Более подробно со всеми техническими характеристиками все эти устройства описаны в этой книге: А.А. Боровой, Е.П. Велихов. Опыт Чернобыля, и я не вижу необходимости перепечатывать слово в слово материал оттуда, поскольку та работа охватывает еще многие аспекты аварии и прекрасно иллюстрирована.
Примечательно, что роботам еще предстояло повторить этот путь спустя четверть века на другом конце земного шара во всем известной аварии на Фукусиме. И этот путь тоже оказался весьма тернистым.
Источник

