Холдинг «Российские космические системы» сообщил о начале экспериментального производства шагающих микророботов, предназначенных для использования в космосе.
В процессе создания робота специалисты изучали строение конечностей и движения животных, в частности гекконовых ящериц. Для передвижения микроробот задействует не менее восьми «ножек» со специальным адгезионным покрытием, позволяющим ему в невесомости «прилипать» к поверхностям.
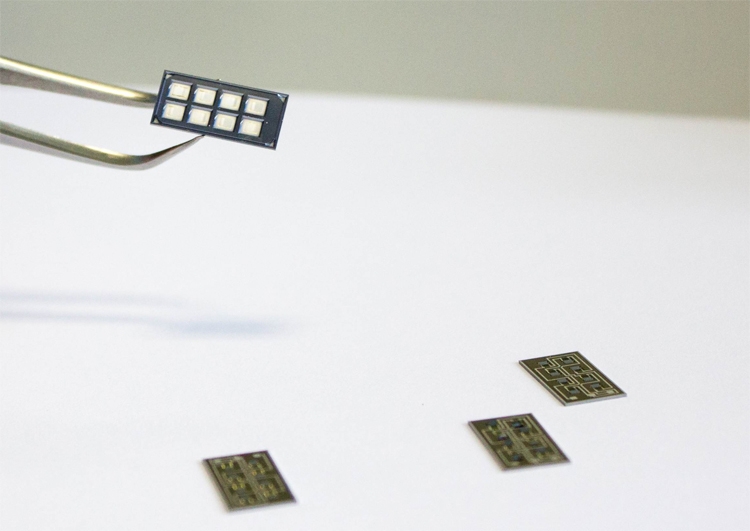
«Российские космические системы»
Каждая из «ножек» имеет «ступню», которая может менять угол во время движения. Это позволяет передвигаться по поверхностям разного типа — шершавым, ступенчатым, наклонным и пр. А значит, робот сможет эффективно функционировать в сложных условиях, например, на внешних частях космических аппаратов или в труднодоступных технических отсеках.
Шагающее движение робота происходит за счёт программируемой деформации «ножек». При нагреве от подачи напряжения они разгибаются в заранее определённых местах, а при охлаждении — сгибаются.
«Российские космические системы»
Вес микроробота-геккона составляет всего 70 мг. При этом он может удерживать нагрузку в 20 раз больше, а перемещать — в 5 раз больше собственного веса. Скорость движения достигает 14 мм/минуту, что весьма быстро для изделий этого типа и такого размера.
Робот способен работать в диапазоне температур от минус 200 до плюс 200 градусов Цельсия при отсутствии земной атмосферы. Решение устойчиво к радиации и воздействию атомарного кислорода в открытом космосе. Проводить испытания разработки планируется на борту МКС.
Источник:


