
▎Откуда пошла робототехника
Прежде, чем говорить о робототехнике, следует выяснить, что такое робот. Казалось бы, любой человек XXI века легко даст определение этому термину. Из литературы можно выяснить: чаще всего под роботом понимается автоматическое устройство, заточенное под выполнение механических действий. Эти действия должны преследовать некую цель, иначе робот не будет отличаться от безделушки.
Рассмотрим трактовку более подробно.
| Автоматическое устройство — это изделие, умеющее самостоятельно реагировать на триггер. Полезная работа заключается в получении, преобразовании и последующем использовании энергии, материалов или информации |
То есть робот получает информацию из внешнего мира, оценивает её на соответствие запрограммированному триггеру и даёт некий ответ.
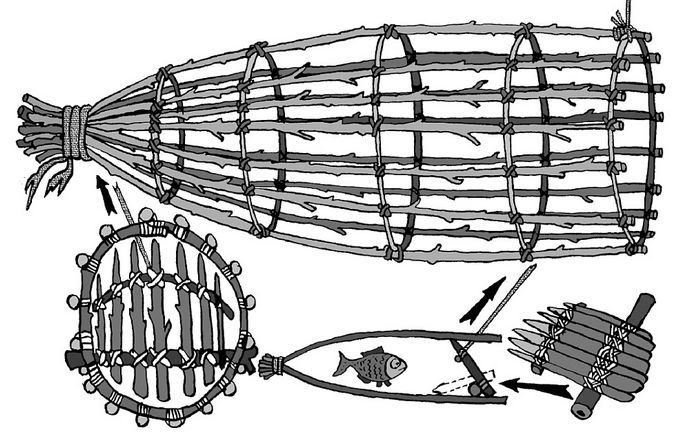
Из этого можно сделать неожиданный вывод: человек давно знаком с робототехникой. Примитивные ловушки для рыбы и зверей, ветряные мельницы, осадные орудия, навигационные приборы и всевозможные самострелы можно расценивать как предтечу современных роботов.
Вряд ли древние люди задумывались, что механика их ловушек сама собой предусматривает программирование. Устройство из крючка, нити, двух прутиков и согнутой ветви работает по принципу «if — then». Если механический триггер от рыбы сдвигает предохранитель, то упругая часть системы приходит в движение, вытягивая добычу на берег. Античные стрело- и камнемёты выполняли работу по перемещению груза. Люди программировали их, изменяя натяжение канатов.

Следующий этап наступил в Новое время, когда появилась достаточно сложная механика и математический аппарат. Этому способствовало развитие часового дела. Оно автоматом подтягивало за собой точное производство деталей и необходимость расчётов, благодаря которым удавалось достичь согласованной работы множества шестерён, валов и стрелок.
Робототехника приобрела современные черты лишь к XX веку, когда появилась микроэлектроника и источники бесперебойного питания.
| Роботы расширили свою автономность, перестав нуждаться в постоянном внимании человека. Процессоры наращивали вычислительную мощность, а с новыми алгоритмами обработки данных роботы стали решать множество сложных задач. |
Потенциал роботов огромен. Они — неотъемлемый элемент множества сфер деятельности, начиная от автоматизированного производства, исследований космоса и заканчивая медициной. Тем не менее у классических роботов есть слабые места. Одним из них выступает ригидность — иными словами, негибкость материалов, которые лежат в основе корпуса и механических узлов.
▎Мягкая робототехника
Учёные, работающие в сфере мягкой робототехники, ищут вдохновение у природы. Существует мнение, согласно которому живые организмы — это биомашины с высокой интеграцией деталей. С ним трудно не согласиться. Если посмотреть на то, как двигаются животные, то мы вряд ли увидим в них ту механическую резкость, какая до сих пор присутствует в роботах.
Черви, осьминоги, угри и прочие змееподобные существа не ползают, а, скорее, перетекают из одного положения в другое. Можно ли научить этому роботов? Сперва разберёмся, зачем это нужно.
Научно-исследовательские роботы отправляются туда, где человек будет подвергаться смертельной опасности. В некоторых местах Вселенной наше присутствие вообще не предусматривалось природой. Речь идёт о вулканах, океанском дне, узких пещерах, поверхности других планет или космическом вакууме. На стыке робототехники и медицины стоит бионика. В предыдущих материалах блога FirstVDS уже рассказывал, как устроены кибернетические протезы. Область их применения ставит перед инженерами довольно сложную задачу: помирить между собой живые ткани и материалы искусственного происхождения.
Имплантат, прилегающий к телу или расположенный в мягких тканях, должен отвечать множеству требований. Основными являются биологическая инертность, атравматичность и «невидимость» для иммунной системы, дабы организм не включал реакции воспаления.
| В англоязычной литературе можно увидеть термин «compliance matching». Из принципа комплаенса следует простая идея: материалы, которые соприкасаются друг с другом, должны иметь одинаковый коэффициент жёсткости. За счёт этого получается снизить напряжения в тех местах, где один материал переходит в другой. |
Читатель может вспомнить неприятные ощущения от обуви низкого качества. Повреждения кожи — прямое следствие низкого комплаенса между кедами и ногой. Здесь начинают работать законы физики. Мягкие ткани, расположенные между жёсткими предметами, оказываются в своеобразных жерновах. Если медицинский персонал недостаточно ухаживает за лежачим пациентом, у того могут развиться пролежни. Пролежень возникает в тот момент, когда кожа и мышцы сдавливаются между костью с одной стороны и кроватью — с другой.
ㅤㅤㅤㅤ
Схожие проблемы всплывают во время установки сосудистых стентов, искусственных клапанов сердца или во время применения плохо подогнанной гильзы протеза.
Из этого следует, что «жёсткие» роботы не подходят для тесного контакта с человеческим организмом.
Медицинская робототехника должна соответствовать реологическим свойствам тканей, на которых она будет «сидеть». Проектирование мягких роботов заставило учёных переосмыслить классический подход к механике, электропитанию и управлению. Поставим себя на место конструкторов. Первый вопрос, на который нам придётся ответить — как придать движение мягкому роботу? Классические рычаги, шарниры и сервомоторы не годятся из-за принципа комплаенса.
▎Как устроен мягкий робот
Наиболее распространённый вариант — использование технологии Pneumatic Networks, он же привод пневматических сетей, построенный из эластомеров. Внутри эластомера расположены камеры с изменяемой геометрией, в которых циркулирует жидкость. В нормальных условиях жидкость очень плохо поддаётся сжиманию. Повышая давление внутри камеры, мы создаём области напряжений эластичного материала.
Повысим давление жидкости. Наибольшие напряжения будут локализоваться в тех местах, где эластомер самый тонкий. Градиент давления приводит к деформации оболочки. Исполнительный механизм приходит в движение. Его характер обусловлен геометрией микрожидкостного контура и упругими свойствами самого материала.
На этом рисунке видно, как можно добиться однонаправленного сгиба. Микрожидкостный привод состоит из небольшой цистерны. Её верхняя поверхность расширяемая, а нижняя — нет. Она выполняет ограничивающую функцию, дабы робот не надулся, как воздушный шарик.
▎Физика, математика и гипотеза цепей Маркова

Изначально обе стенки имеют одинаковую длину. Назовём её L0. При повышении давления в камере размер верхней части станет L0 + ΔL. Разумеется, эл-ноль плюс дельта-эл будет больше, чем L0. Это приведёт к сгибанию рабочей части. На языке математики можно разбить любое движение на последовательность простых фаз. Рассмотрим движение сквозь призму гипотезы цепей Маркова.
В данном случае мы работаем с последовательностью событий, у каждого из которых есть конечное число исходов. При этом новое состояние системы зависит от фазы, которой робот добился по итогу прошлого события.
Изучим гипотезу цепей Маркова «на пальцах». Допустим, читатель захотел сходить в магазин. Выйти из дома, попасть в лифт, спуститься на первый этаж, добраться до супермаркета, выбрать товар, оплатить его и вернуться в квартиру — это задачи, которые он решает последовательно.
С одной стороны, пропустить какие-то этапы не выйдет. С другой — запирание двери и пробивание покупки на кассе не имеют прямого влияния друг на друга, хотя между ними существует логическая связь. Именно сгибание-разгибание лежит в основе функционирования софтроботов на основе эластомера. Примитивные движения становятся кирпичиками, из которых складывается выполнение задачи.
▎Новые материалы
Мягкие роботы состоят из эластомеров марки Ecoflex и полидиметилсилоксана (PDMS). За счёт своих свойств PDMS подходит для создания ограничивающих слоёв, а гибкий Ecoflex идёт в основу внешней оболочки. Эластомеры обладают разной жёсткостью, но при этом доступны формовке и легко соединяются друг с другом. У PDMS твёрдость по Шору составляет 50 пунктов. Ecoflex более мягкий и разрывается только при растяжении на 9000%.
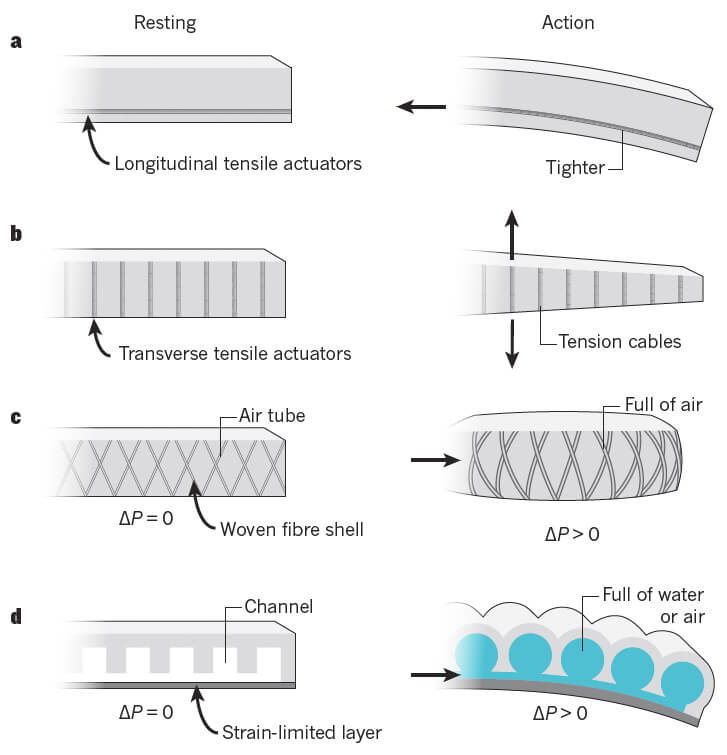
Ограничивающий слой вовсе не обязан состоять только из эластомеров. Эту роль эффективно выполняет нерастяжимое волокно, плёнка или пластиковый «скелет»:
ㅤㅤㅤㅤㅤㅤㅤㅤㅤㅤ
На технологии PneumoNet построены пневматические приводы. Для механики не особо важно, какая среда будет формировать давление:
ㅤㅤ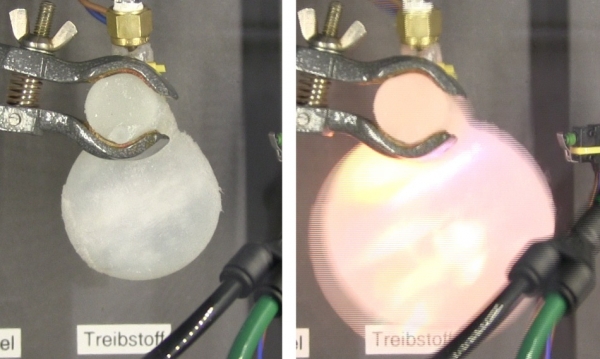
Приводы CDA похожи на пневматические, но запитаны от двигателя внутреннего сгорания. При воспламенении жидкого топлива формируется большое количество газа, который и выступает рабочим телом.
ㅤㅤ
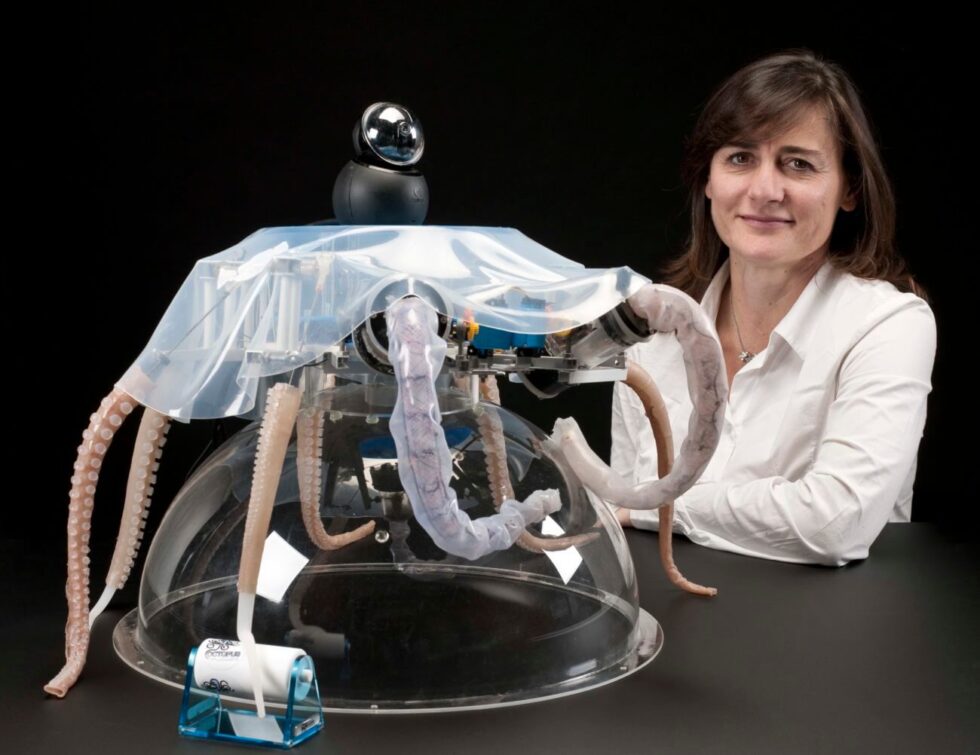
Октобот, разработанный в Гарварде, приводился в действие именно с помощью CDA.
Фоточувствительные приводы работают на свету. Их основа — жидкокристаллические эластомеры (LCE), способные изменять геометрию при контакте с излучением оптического диапазона.

| Жидкие кристаллы — уникальные формы вещества. Молекулы жидкости приобретают вытянутую или дисковидную форму, а также располагаются упорядоченными слоями. Под воздействием электромагнитного поля жидкий кристалл меняет ориентацию молекул. |
С точки зрения современной физики, свет относится к явлениям электромагнитного взаимодействия. Если LCE реагируют на фотоны, то другие материалы просто обязаны отзываться на электрический ток и воздействие магнита.
Перед вами типичный привод из диэлектрических эластомеров. DEA состоят из мягкой эластомерной мембраны, установленной между электродами. Дав ток на электроды, мы вызываем «расплющивание» мембраны, во время которой она становится шире и тоньше. При отключении тока привод возвращается в исходное положение.
▎Как сделать софтробота
Производство мягких роботов начинается с изготовления эластомера. Для этого применяют методику мягкого литья, при которой материал заполняет подготовленную форму. Сами формы изготавливают с помощью 3D-принтинга.

Условно мягкого робота можно разделить на две части, которые уже известны читателю: внешний и ограничивающий слой.
| Сначала будущие слои заливают в формы. Там проходит первая стадия отвердения. Дальше остаётся извлечь половинки и склеить их тонкой прослойкой эластомера. Наступает следующий и финальный этап полимеризации, при котором детали становятся единым целым. |
Мягкие роботы состоят из огромного множества деталей. Увязать их в единое целое — трудная задача, которую можно выполнить лишь в ходе многоуровневого процесса. Но суть остаётся неизменной: производитель идёт от простого к сложному, собирая робота, как конструктор «Лего».
▎Применение мягких роботов
| Мягкость — не единственное преимущество софтроботов. За счёт реологических свойств материалов они совместимы с биологическими тканями. Здесь открываются фантастические перспективы для создания устройств малоинвазивной хирургии, носимой бионики и средств точечной доставки лекарств. |
Первая область медицинского применения софтроботов — это создание устройств, помогающих восстановить мелкую моторику конечностей. В этом нуждаются пациенты с неврологическими нарушениями и слабостью скелетной мускулатуры.
Софтроботы нашли применение в деле кардиостимуляции. Сердце — это биологический насос, двигающий кровь по сосудам. У него есть собственные водители ритма, а клетки-кардиомиоциты способны к синхронному сокращению.
Их работа — нечто большее, чем банальный цикл расслабления-напряжения. Для нормальной гемодинамики нужно чередовать систолу и диастолу, поддерживать сердечный выброс и ударный объём, не говоря о том, что эти фазы должны иметь строго определённую продолжительность. Иначе кровь попросту не доберётся до органов.
При инфарктах миокарда формируются неактивные зоны сердца. Разумеется, отмершие кардиомиоциты уже не будут качать кровь. Если зона ишемии коснулась проводящей системы сердца, то его отделы начинают работать вразнобой. Так выглядят наиболее опасные виды аритмий.
Кардиостимуляторы нужны для того, чтобы вернуть отделам сердца способности к согласованной работе. Современные технологии подбираются к этапу эффективного протезирования сердца. Об этих достижениях блог FirstVDS писал в статье, посвящённой биопринтингу.
Но есть и другой вариант: использовать аккутаторы Мак’Киббена, создавая кибернетическое сердце. Первые шаги в эту стороны были сделаны в пятидесятых годах прошлого века. Тогда американские учёные выпустили тестовый образец пневматической мускулатуры, что легла в основу «мягкой» робототехники.
Аккутатор выглядит как эластичный шар, заключённый в оплётку из нерастяжимых волокон:

Ещё одно интересное применение мягких роботов — это производство компонентов для экзоскелетов:
ㅤㅤ
Экзоскелет повторяет биомеханику движений человека, расширяя его способности за счёт передачи нагрузки на внешние компоненты устройства Эта особенность очень полезна для пожилых людей, пациентов с двигательными расстройствами из-за инсультов, болезни Паркинсона и рассеянного склероза. Ещё одна категория людей, способная оценить экзоскелеты по достоинству — это спасатели, пожарные, парамедики и все, кто по долгу службы таскают массивные грузы.
Классические экзоскелеты выполнены из жёстких материалов. Они работают параллельно с биомеханикой опорно-двигательного аппарата носителя. Вместе с увеличением физической силы они повышают выносливость владельца, защищая человека от физического стресса и сопутствующих травм. Тем не менее эти механизмы громоздкие, тяжёлые и не очень приспособлены к исполнению плавных движений.
Мягкий экзоскелет ближе к искусственной коже, чем к набору железных костей и сервомоторов.
Новый тип носимых роботов основан на пневматической мускулатуре приводом Мак’Кибена, совместим со сложными движениями человека и обладает малым весом. Экзоскелет, разработанный в институте Висса, не содержит жестких элементов. За счёт этого он практически не мешает носителю. С ним не бывает проблемы смещения сочленений, потому что их нет!
Очевидно, что эта технология хорошо показывает себя в мягких бионических протезах:

Роботизированное устройство двигается благодаря комплексной интеграции между «живой» и механической мускулатурой. Управление строится на принципах двусторонней направленной связи между носителем и кибернетическим устройством.
Встроенные сенсоры анализируют положение компонентов протеза в каждый момент времени. Команды к выполнению движения считываются с помощью когнитивных блоков и жестов тела.
Нечто похожее FirstVDS уже освещал в статье, посвящённой спинномозговому мосту.
▎Преимущества и недостатки технологии
| Софтроботы — замечательные штуковины, однако даже они вовсе не застрахованы от «детских болезней». Контролировать их работу весьма трудно. Их движения до сих пор остаются менее точными, чем у «твёрдых» собратьев. Современная электроника ещё не готова отойти от применения жёстких опор. Значит, вспомогательное оборудование вместе с аппаратно-программной оболочкой остаётся за бортом, и не совсем понятно, есть ли пути для обхода этой проблемы. |
С другой стороны, все недостатки с лихвой компенсируются уникальными возможностями новых роботов. Они способны выполнять очень сложные движения, пускай и неточно. Упругий, деформируемый и мягкий корпус проявляет очень большую живучесть. Он буквально проглатывает удары, не допуская разрушения самого механизма. Адаптируемая форма позволяет софтроботу моментально приспосабливаться к самой экзотичной среде. Например, кровеносным сосудам в человеческом теле.
ㅤㅤㅤ
Ещё одно преимущество мягких материалов — регенерация. В статье, посвящённой геймдеву, мы вскользь касались этого животрепещущего вопроса. Робот, умеющий залечивать повреждения, резко прокачивается до чего-то большего, чем простая машина.
| Регенерация — это не только восстановление механической структуры, но и рост. Он подтягивает за собой логичное следствие в виде образования новых роботов ресурсами предыдущих. В этот момент начинают работать законы естественного отбора, а роботы приближаются к той грани, которая отделяет механизм от живого существа. |
Источники:
- Все изображения взяты из открытых источников и принадлежат правообладателям.
- Дополнительные материалы прикреплены в соответствующих гиперссылках.
Автор: врач нейро-анестезиолог Никита Игнатенко
НЛО прилетело и оставило здесь промокод для читателей нашего блога:
— 15% на заказ любого VDS (кроме тарифа Прогрев) — HABRFIRSTVDS


