
Автономный летающий беспроводной малогабаритный робот-куб «Bumble» проекта Astrobee начал проходить полетные испытания на борту МКС.
2019 год — год роботов на МКС. Еще не прилетел FEDOR, а уже начались боевые тесты у роботов проекта Astrobee.

Два робота уже находятся на станции — это «Bumble» и «Honey», а в июле ожидается прибытие на МКС третьего робота — «Queen».
Их имена непросто так связаны с миниатюрностью и имеют «пчелиный» нрав.
Это специально разработанные для работы в невесомости внутри модулей МКС сервисные небольшие автономные роботы, спроектированные и созданные NASA в исследовательском центре Ames, которые должны как пчелки взять на себя часть рутинных космических задач и освободить экипаж МКС от простых, но частых действий.
Таким образом, проект Astrobee — это свободно летающая система из комплекса роботов, основной целью которой является испытание малогабаритных автоматизированных платформ в условиях невесомости с получением и анализом данных в реальных условиях и возможностью дальнейшего модернизирования и усовершенствования программного обеспечения и функций роботов для выполнения текущих и новых задач на МКС.

Характеристики роботов проекта Astrobee:
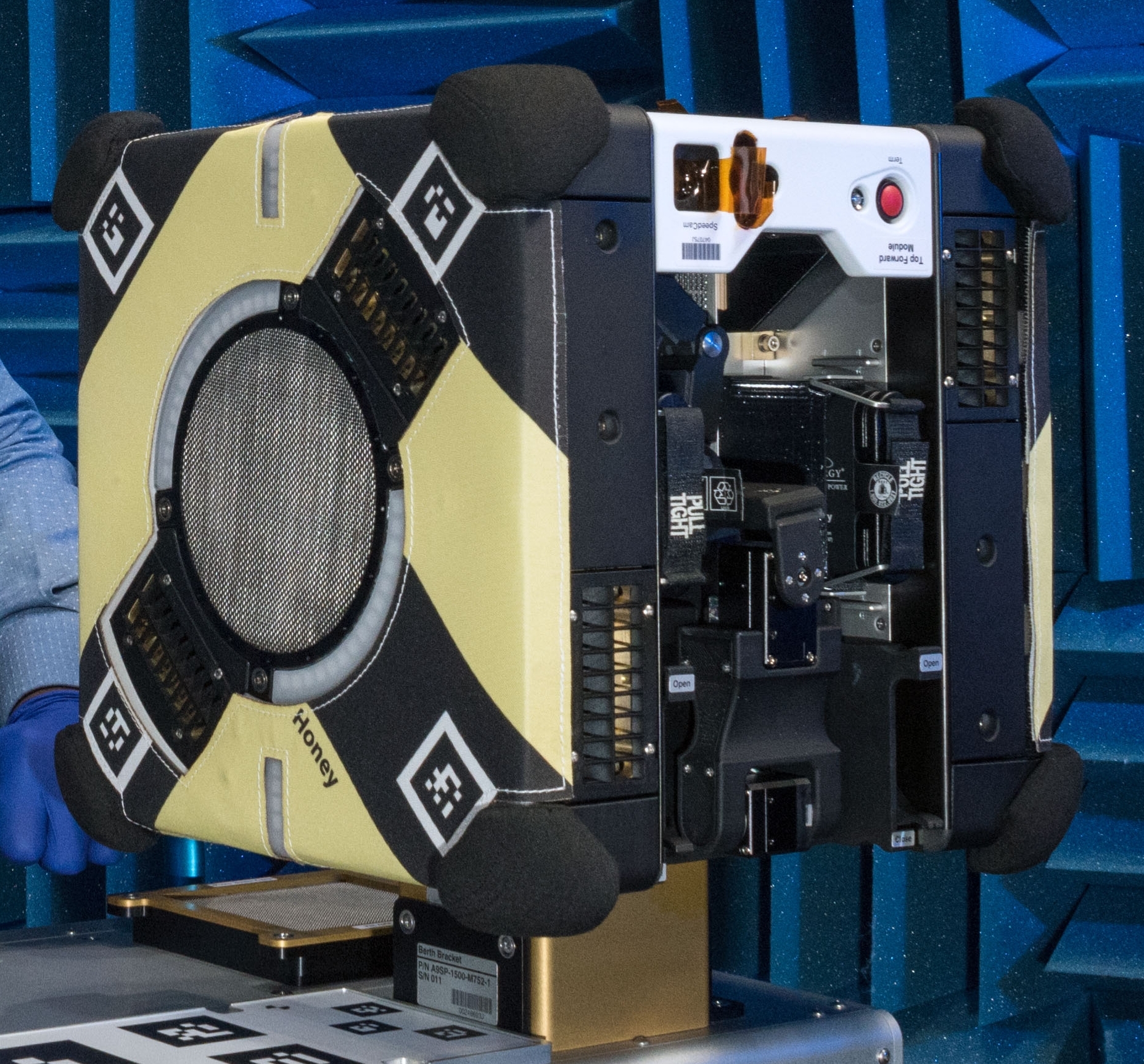
— размер одного робота — 30х30х30 сантиметров (1х1х1 фут);
— корпус робота покрыт мягким материалом для минимизации возможного ущерба при ударе о какой-либо предмет или элемент на МКС;
— часть граней робота предназначена для работы с небольшими грузами, тут даже есть система захвата и фиксации предметов со складывающимся манипулятором, чтобы робот мог удерживать и безопасно перемещать предмет из одного конца станции в другой;
— у роботов есть отдельная внешняя зарядная станция формы плоского прямоугольника, похожа на док-станцию для ноутбука, которая служит для зарядки батарей роботов и снятия данных телеметрии;
— роботы могут передвигаться только внутри МКС в условиях невесомости лишь в том случае, если в рабочем модуле с роботом есть атмосфера, их реактивная система использует воздух станции для движения;
— у каждого робота своя компьютерная система управления бортовой системой вентиляторов, которая позволяет захватывать и выбрасывать воздух через 12 форсунок в направлении, противоположном намеченному вектору движения, что дает возможность робопчелке двигаться в любом направлении и свободно летать по МКС в условиях невесомости;
— вентиляторы робота находятся за специальной защитной стенкой на гранях его куба;
— компьютерная система робота работает на Linux, причем модуль, который отвечает за работу с предметами и их перемещением работает на основе Android, что позволяет быстро расширять функциональность системы при необходимости;
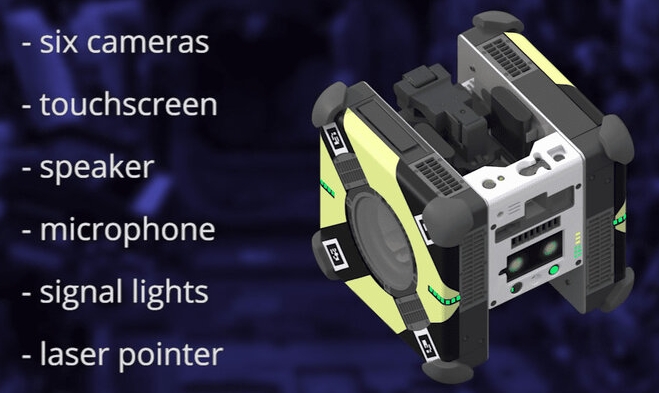
— у каждого робота есть на борту: главная навигационная камера с полем зрения в 116°, несколько HD-камер с автофокусом, которые способны передавать информацию с МКС на Землю в режиме реального времени, причем его бортовая камера CamBoard Pico Flexx позволяет роботу распознавать предметы и препятствия с расстояния до четырех метров;
— каждый робот имеет оптический детектор для определения скорости и аварийного выполнения процедуры остановки;
— режимы работы роботов: автономный, так же ими можно управлять удаленно, безопасно брать в руки, ставить на зарядку при необходимости, отключать их.
Функции роботов проекта Astrobee:
— основная задача роботов — помощь экипажу на МКС, выполнение ряда рутинных задач, чтобы персонал мог сфокусироваться на более важных задачах (проведении экспериментов и различных исследований);
— проводить инвентаризацию, документировать эксперименты, проверять системы МКС и перемещать грузы, предметы и инструменты через узкие коридоры станции и между модулями;
— выполнять техническое обслуживание модулей МКС, когда в них нет персонала или в местах, куда экипаж не может оперативно добраться;
— вести мониторинг работы систем и датчиков МКС;
— контролировать качества воздуха, анализировать уровень концентрации углекислого газа в разных местах МКС так часто, как потребуется.
История появления роботов проекта Astrobee на МКС:
— зарядная станция была доставлена на борт МКС 17 ноября 2018 года и была установлена 15 февраля 2019 года;
— роботы «Bumble» и «Honey» были запущены с Земли на МКС 17 апреля 2019 года;
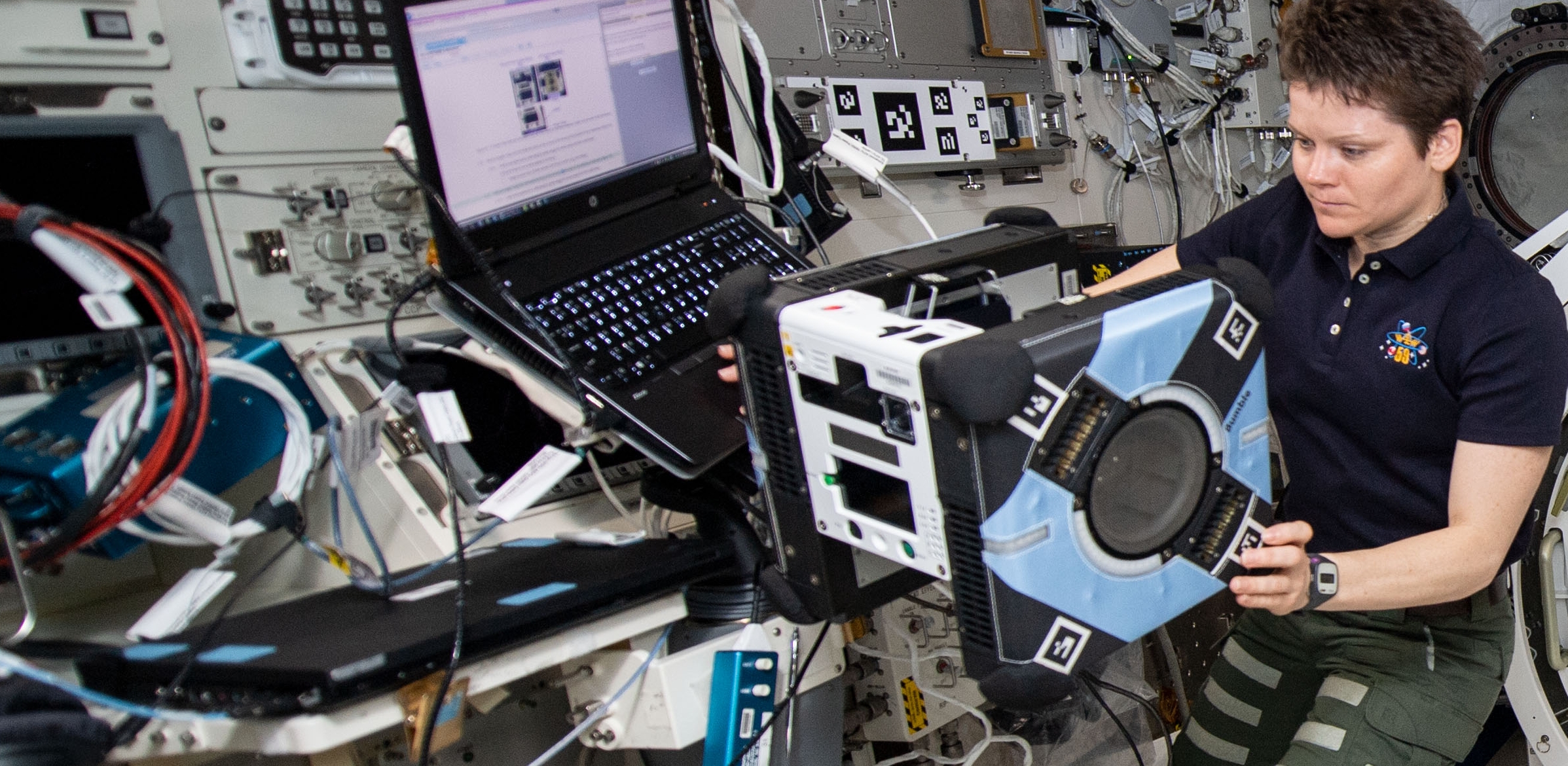
— 30 апреля 2019 года Энн МакКлейн (астронавт МКС) распаковала ящик с роботом «Bumble» и при поддержке команды разработчиков NASA проекта Astrobee, находившейся в Исследовательском центре имени Ames, провела проверку всех вспомогательных системы робота – авионики, видеокамер, пропульсивной системы, а также передачу данных и зарядку его батарей;


— 14 июня 2019 года начались полетные испытания с роботом «Bumble»;
— июль 2019 года — ожидается прибытие на МКС третьего робота «Queen».
Про первый полет робота «Bumble» проекта Astrobee на МКС:
14 июня 2019 года робот «Bumble» стал первым роботом проекта Astrobee, который совершил первый тестовый полет в невесомости.
Перед первым полетом робота «Bumble» команда проекта Astrobee в исследовательском центре Ames удаленно проверила все его бортовые системы, было получено подтверждение с Земли, что робот может идентифицировать свое местоположение и готов к осуществлению навигации внутри МКС.
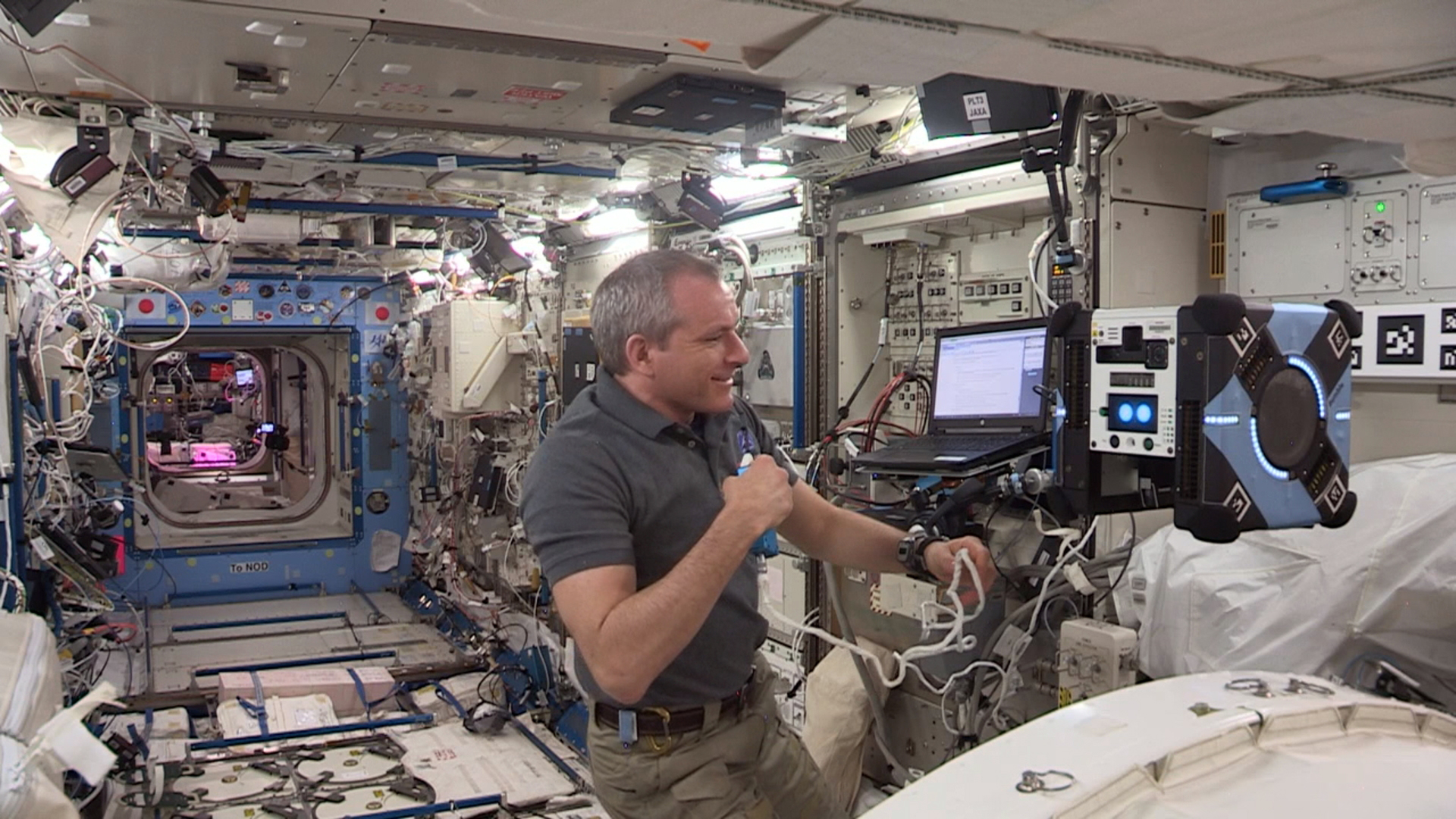
Астронавт Канадского космического агентства Дэвид Сен-Жак оказал практическую помощь при проведении предполетных испытаний, вручную перемещая робота «Bumble» внутри научной лаборатории МКС в модуле «Кибо», чтобы позволить навигационной системе робота выполнить калибровку в новом окружении по факту.
Навигационная система робота «Bumble» использует штатные камеры для наблюдением и мониторингом внешнего пространства и далее сравнивает полученные изображения с ранее загруженной в робота картой интерьера МКС.
Роботы проекта Astrobeе спроектированы двигаться в любом направлении и вращаться вокруг своих осей в пространстве на борту МКС.
Далее начались испытания работы полетных систем робота «Bumble» в автоматическом режиме и управляемом режиме (удаленно с Земли).
В ходе первого своего тестового полета робота «Bumble» проверялась работоспособность его основных бортовых компонентов и выполнялся комплекс из основных движений, таких как «полет на 11,8 дюйма (30 сантиметров) вперед» или «поворот на 45 градусов вправо», ориентация в пространстве МКС и так далее.

В NASA планируют продолжит тестировать полетные возможности робота «Bumble» с помощью серии все более сложных маневров, чтобы определить, насколько хорошо его элементы могут работать в условиях невесомости и какие нужно внести корректировки в программное обеспечение для дальнейшего его использования.
По результатам комплекса этих летных испытаний будут созданы базовые настройки для двигательной системы роботов проекта проекта Astrobeе, с помощью которых планируется помочь роботам «Bumble», «Honey» и «Queen» подготовиться к тому, чтобы взять на себя роли новых членов экипажа МКС.


Источник


