18 марта 1965 года советский космонавт Алексей Леонов совершил первый в мире выход в открытый космос, перевернув новую страницу в истории космонавтики. Спустя менее трех месяцев, 03 июня 1965 года это повторил американский космонавт Эдвард Уайт. Дальше — больше. Однако, хоть работы в открытом космосе и превратились из подвига в обыденность, менее опасными и менее простыми они не стали.
Космонавту угрожает опасность столкновения с микрометеоритами или космическим мусором. Любое серьезное повреждение скафандра грозит разгерметизацией и практически неизбежной смертью. Космонавт может оторваться от корабля и затеряться в космическом пространстве. Спасти его в этом случае также почти невозможно. Длительные и сложные манипуляции в многослойных скафандрах требуют от космонавтов высочайшей квалификации и физической подготовки.
Поэтому неудивительно, что в НАСА довольно быстро задумались о том, чтобы облегчить жизнь работникам орбиты. На волне моды на роботизацию всего и вся возник проект по оснащению каждого космического корабля и станции одним или несколькими вспомогательными аппаратами, которые бы помогали космонавтом во время работ в открытом космосе, а в идеале и вовсе бы их заменяли. Эдакие дроны-помощники, в лучших традициях современной фантастики.

В 1971 году был дан старт проекту Free Flyer по разработке телеуправляемых миниракет, оснащенных манипуляторами, которые смогли бы избавить космонавтов от многих трудных или опасных задач, выполняемых на орбите.
Предполагалось, что такой дрон будет иметь форму коробки 1.2х0.9х0.8 м и снаряженной массой около 180 кг. Каждый дрон оснащался как минимум двумя сложными манипуляторами с 7 сочленениями. При необходимости манипуляторы могли заменяться другим оборудованием. Также имелось как минимум три камеры. Главная, на выдвижной стреле спереди и две вспомогательных на манипуляторах. За перемещение дрона в пространстве отвечали 16 направленных разные стороны миниатюрных двигателя на гидразине.
А почему гидразин, а не пневмо например…
… ведь было бы гораздо экологичнее (для испытаний в лаборатории) да и в кино видали. Разгадка проста — 50 лет назад топлива на гидразинах были очень широко распространены, особенно у военных, и работать с ними, скажем так, не боялись и умели. Минус у гидразина существенен — его чрезвычайная токсичность, но на этом минусы на тот момент заканчивались. А среди плюсов есть возможность использовать его в качестве однокомпонентноого топлива, в том числе и для маломощных двигателей. В общем, удобно, практично, дёшево и всё для него уже есть.

Если желаете углубиться в вопрос, вот хорошая хабростатья.
Такой дрон предполагалось по умолчанию загружать в грузовой отсек каждого шаттла и применять по мере надобности.
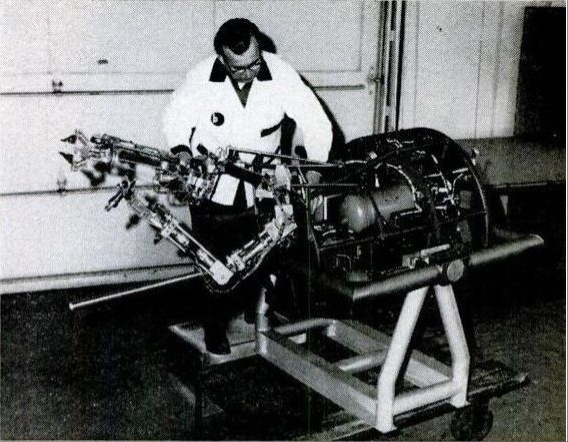
Экспериментальный образец дрона.
Отдельно хочется сказать пару слов про манипуляторы. Дрон планировалось оснастить манипуляторами модели M-12, разработанными на основе протеза «Золотая рука» — механизированного ортеза для рук, разработанного в 1965 году мединститутом Rancho Los Amigos, Inc. Впоследствии велись работы по созданию полноценного протеза, полностью заменяющего руку и управляемого нейросигналами нервной системы. Увы, не давшие на то время ощутимого результата. Однако сам ортез был очень популярен в США на фоне всплеска заболеваемости полиомиелитом.
В середине ХХ века полиомиелит был настоящим бичом в Штатах
Вакцину от него придумали в конце 1950-х, а до этого времени довольно обыденным явлением были подобные картины:

Лос-Анджелес, 1950-е. Пациенты с осложнениями полиомиелита часто становятся парализованными настолько, что не могут дышать самостоятельно. В те времена их аппараты ИВЛ выглядели так.
Менее тяжёлые последствия «всего лишь» вызывали паралич и атрофию мышц конечностей. И тогда на помощь людям приходили первые «экзоскелеты» — ортезы.
Ортез даже успел сыграть одну из главных ролей в фильме.
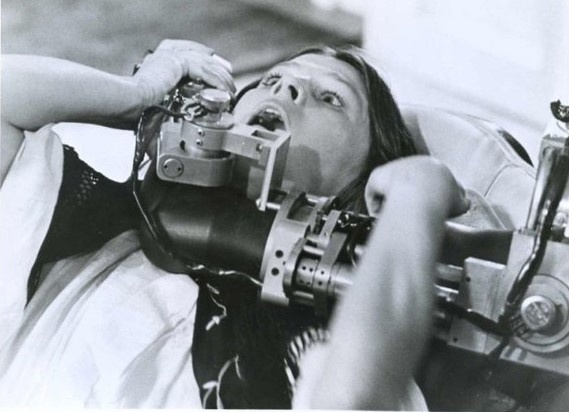
Кадр из фильма «Семя дьявола», где ортез «сыграл» роль обезумевшего ИИ.
Управление дроном должно было осуществляться оператором из кабины шаттла или с Земли, в зависимости от характера работ. В первую очередь дрон рассматривался, как средство вывода и монтажа спутников на синхронной орбите. В этом случае дрон действовал в соединении с «космическим буксиром», выводил и стабилизировал спутник на орбите, проводил, при необходимости, монтажные или ремонтные работы, в новь стыковался с буксиром и возвращался к шаттлу. В этом случае управление дроном было логично осуществлять с Земли, по отношению к которой дрон на синхронной орбите был неподвижен, а не с шаттла, который движется по более низкой орбите и где сигнал бы каждый час перекрывался планетарным телом Земли. А вот для работ в непосредственной близости от шаттла логично было переключать управление на оператора-космонавта.
Помимо этого, на дрон возлагались задачи попроще. Осмотр космических аппаратов на предмет повреждений, мелкий ремонт, помощь работающим в космосе космонавтам, подвоз крупногабаритных элементов конструкции, инструмента и прочее «подай-принеси». Рассматривался он и как спасательное средство на случай, если космонавта по каким-то причинам унесет в открытый космос.

В 1972 году были начаты испытания экспериментального образца дрона, во многом не менее интересные, чем сам дрон. В испытательном центре Textron Bell Aerospace (Буффало, штат Нью-Йорк) была смонтирован испытательный бокс размером 145 кв. м. Дрон закреплялся на мобильной платформе на воздушной подушке, которая с минимальным сопротивлением ездила по пластиковому покрытию пола. Экспериментальный дрон был оснащен 12 реактивными минидвигателями, мощности которых хватало для перемещения платформы вперед и в стороны. Сделано это было для того, чтобы создать имитацию инерции, которая неизбежно будет возникать при маневрах дрона в космосе. За вертикальные маневры всё же отвечала гидравлика платформы. Управление дроном осуществлялось миниатюрными джойстиками с операторского пульта в другом помещении, ориентироваться оператор мог только по встроенным в дрон телекамерам и приборной доске. Напротив дрона монтировался имитатор стыковочного узла, отдельных элементов спутника или иные модели.

Испытательный стенд и пульт управления.
В ходе серии испытаний экспериментальному Free Flyer удалось состыковаться со спутником с помощью простого стержнеобразного зонда. С помощью дистанционного управления он удалил и заменил узел двигателя спутника, установил и удлинил штыревую антенну, сменил аккумулятор. Он также смог обнаружить треснувшие и разрушенные элементы солнечных панелей. С помощью зеркала и телекамеры на манипуляторе оказалось возможным даже провести инспекцию внутренних узлов оборудования. Нельзя сказать, что испытания прошли идеально — все действия оператору удавалось выполнить со второй-третьей попытки. Однако было доказано, что при должных тренировках и навыках оператора дрон может полноценно выполнять возложенные на него задачи.
Увы, практической реализации именно этот проект так и не дождался, хотя в вялотекущем состоянии продолжается до сих пор.
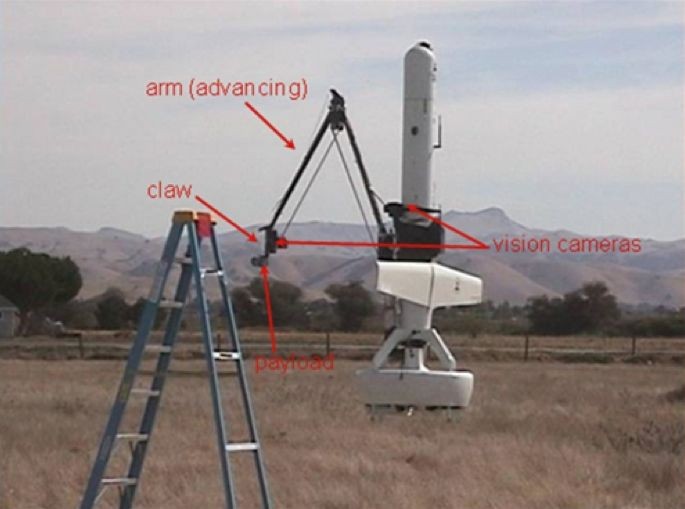
V-Bat от DARPA (США) — дрон с «рукой».
Европейский же манипулятор на модуле «Наука» — без движков — прикручен.
После окончания Холодной войны и распада СССР темпы освоения космоса сильно снизились и сейчас там для автономных роботов банально нет работы. Вся надежда на будущее.