
Поговори сам с собой: ученые научили роботов самоанализу и улучшили результаты их работы
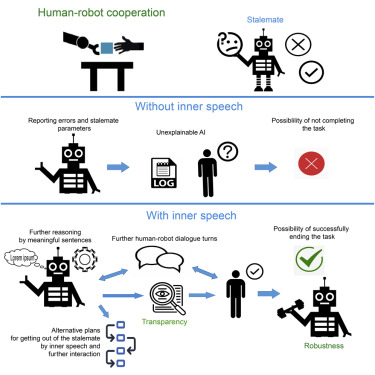
Многие из нас говорят с сами с собой, только не вслух, конечно, а мысленно. Психологи говорят, что это вполне нормально и даже полезно. Причем не только для человека, но и для роботов. Так, итальянские ученые сознательно научили человекоподобных роботов думать вслух. Благодаря экспериментам они доказали, что внутренний монолог помогает разобраться в сложных и неопределенных ситуациях даже автоматическим системам. Центральной фигурой эксперимента стал японский робот-помощник Pepper, разработанный корпорацией SoftBank Robotics.
Основа исследования — работа ученого и антрополога Льва Выготского, который в свое время создал концепцию внутренней речи. Он, кстати, заметил, что маленькие дети в первые годы жизни часто озвучивают мысли тогда же, когда учатся говорить с другими. Уже позднее эта речь переходит во внутренний монолог. Так вот, если с человеком все более-менее ясно, то что с роботами? Пришло время это узнать.
Суть эксперимента
Эксперимент провели двое ученых из Университета Палермо. Они интегрировали в операционную систему робота модель внутренней речи на основе ACT-R. Это система управления роботом, включающая стандартные инструменты преобразования текста в речь и наоборот.
Цели эксперимента:
- Научить робота сопровождать действия голосом: комментировать все итерации в моменте.
- Провести оценку результатов и понять, как влияет проговаривание на итоги.
Перед Pepper поставили задачу — накрыть обеденный стол в соответствии с правилами этикета и указаниями, полученными от человека. Последние иногда противоречили правилам этикета, «изученным» роботом. Предполагалось, что в ходе взаимодействия у робота могут возникнуть различные оценочные суждения и всплывут вопросы нравственности (нет, ничего противозаконного роботу делать не предлагали).
В ходе эксперимента оценивали полученные результаты, когда робот использовал и не использовал внутреннюю речь.
Что произошло?
Роботу показали схему, отвечающую за нормы этикета.
Выглядела она так:
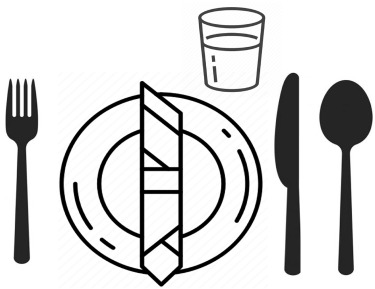
Человек и робот разместились за столом. Слушая указания и помня про схему, робот должен был выполнять требуемые действия. При этом начальные данные могли быть любыми: все предметы на столе, каких-то не хватает, есть лишние. Всего провели 60 итераций по 30 в каждом из двух блоков: с озвучкой внутреннего монолога и без. В 40 случаях из 60 содержались противоречие и/или конфликт.
С Pepper взаимодействовали по трем сценариям:
- Простое и понятное выполнение указаний без противоречий. Здесь все логично.
- Наличие противоречия между действиями и требованиями. В этом случае робот видел проблему: выполнить действие, несмотря на противоречие, или нет (нарушить правила или нет).
- Ложное требование: положить предмет, который уже есть. Робот сталкивался с дилеммой.
Все проведенные попытки оценили по нескольким показателям:
- время принятия решения;
- время выполнения задания;
- количество удачных попыток;
- прозрачность операций.
Последний пункт анализировал человек. Под прозрачностью понимали степень ясности изложения роботом мыслей относительно решения задачи. Попытку считали успешной, если она завершалась требуемым действием.
Итоги
Как и ожидалось, в простых и понятных случаях, внутренний монолог никак не влиял на действия. Размышления робота текли в самом логичном русле: он искал требуемый предмет, брал его, передавал и опережал действия словами.
Однако совсем другая картина складывалась в ситуациях, когда робот сталкивался с конфликтом требований. В этом случае робот видел несоответствие и задавал уточняющие вопросы человеку. Только потом выполнял действие. Однако если внутренняя речь была отключена, то успехом попытка так и не завершалась. Почему? Робот видел конфликт и отказывался выполнять действие.
Самое интересное происходило в третьем сценарии. Робот сразу идентифицировал требование как ложное и отмечал, что действие, например, уже выполнено (салфетка находится на столе или вилка уже лежит). Но это не все. Робот высказывал тревогу и пытался убедиться, точно ли его партнер это видит. Тогда человек говорил, что вообще имел в виду другой предмет (нож, допустим), робот соглашался и успешно завершал итерацию.
Вот результаты эксперимента, здесь два блока по 30 итераций.
Первый блок с включенным внутренним монологом:
26 — число успешных попыток;
28 — число прозрачных итераций.
Второй блок с выключенным внутренним монологом:
18 — число успешных попыток;
12 — число прозрачных взаимодействий.
То есть действия робота были успешнее в том случае, если он анализировал происходящее. Получается, что самоанализ и рефлексия способны помочь роботам повысить качество работы, выйти из неопределенных ситуаций и успешно решить задачу. Кроме того, использование внутренней речи помогает роботу выйти на диалог с человеком и найти новые способы решения поставленных им задач.

Похожие статьи
 От Джона Уилера до наших дней: эволюция концепции бозонных звезд
От Джона Уилера до наших дней: эволюция концепции бозонных звезд Космический телескоп «Роман» займется поиском древних черных дыр по поглощаемым ими звездам
Космический телескоп «Роман» займется поиском древних черных дыр по поглощаемым ими звездам Можно ли разделить фотон пополам с точки зрения квантовой физики?
Можно ли разделить фотон пополам с точки зрения квантовой физики? Призрачные отсветы минувшего
Призрачные отсветы минувшего Объективная реальность существует лишь благодаря другим людям
Объективная реальность существует лишь благодаря другим людям Как миллионы лет эволюции сделали из стрекоз непревзойденных пилотов
Как миллионы лет эволюции сделали из стрекоз непревзойденных пилотов Именная гитара «Flying Arrow» Керри Кинга от B.C. Rich
Именная гитара «Flying Arrow» Керри Кинга от B.C. Rich Темная энергия под вопросом: почему рушится главная модель Вселенной
Темная энергия под вопросом: почему рушится главная модель Вселенной