![[Перевод] X-образных отметки, как способ идентификации РЛС с помощью анализа открытых данных от двух научных спутников SENTINEL-1](https://habrastorage.org/webt/kz/3a/wa/kz3awaff2xl46kqmgnsvijtmljk.png "[Перевод] X-образных отметки, как способ идентификации РЛС с помощью анализа открытых данных от двух научных спутников SENTINEL-1")
ГИС-аналитик Харел Дан заметил, что, когда он случайно отрегулировал уровни шумов, работая с базой изображений, полученных со спутников группировки SENTINEL-1, то внезапно по всему миру появилось множество цветных X-образных отметин.
Под РЛС в статье понимается радиолокационная станция сопровождения c фазированной антенной решёткой.
В состав спутниковой группировки SENTINEL-1 входят: спутник Sentinel-1A (запущен 3 апреля 2014 года) и спутник Sentinel-1B (25 апреля 2016 года). Масса каждого спутника 2300 килограммов, выведены на солнечно-синхронную орбиту высотой 690 километров.
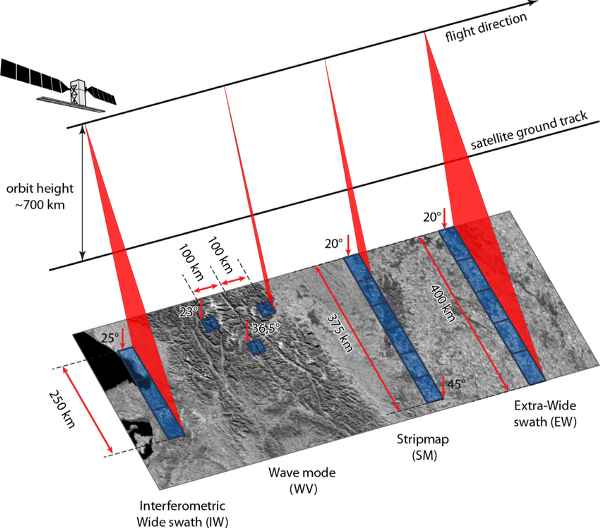
Существует два основных типа спутников для дистанционного зондирования: оптический и радиолокационный. Каждый тип можно подразделить далее на подкатегории, основанные на апертуре, орбите и диапазонах. В данный момент, одним из наиболее используемых таких комплексов является реализация этапов программы Европейского космического агентства (ESA) под названием Copernicus с использованием пары спутников из группировки Sentinel-1, S1A и S1B, которые позволят получить данные с комбинированным средним временем ожидания 1,5 дня в лучшем случае.
Такой способ получения данных с высоким разрешением и коротким временем обновления, а также предоставление открытого доступа к данным с этих спутников, теперь играет важную роль во многих областях научных исследований, включая данные для реагирования на чрезвычайные ситуации, мониторинга морской и водной среды (даже паводков), анализа растительных покровов, оценки лесных пожаров и городского планирования.
Данные со спутников могут быть свободно загружены и проанализированы на многих платформах, включая: Copernicus Open Data Hub, Sentinel EO Browser и Google Earth Engine.
Миссия Sentinel-1 реализована на базе комплекса двух идентичных спутников Sentinel-1A и Sentinel-1B, вращающихся по разнесенным на 180 градусов друг от друга орбитам вокруг Земли. Использование этих спутников позволяет создать глобальный охват земной поверхности и возможность доставки оптимизированных данных для пользователей программы Copernicus
Принимая во внимание, что в данных из оптических образов могут быть искажения, вызванные помехами от облаков и пыли, то с помощью данных из радиолокационных изображений можно по большей части «видеть» сквозь водяной пар и другие твердые частицы. С другой стороны, данные из радиолокационных изображений могут быть искажены из-за помех других источников, находящихся на земле и передающих на одинаковых длинах волн.
Анализируя данные с Sentinel-1, вы сталкиваетесь со многими типами помех, вспышек, завихрений, крапинок и волн на изображениях, поэтому необходимо объединение и фильтрация данных с нескольких изображений, чтобы можно было создать более четкое изображение и компенсировать некоторые, если не все помехи.
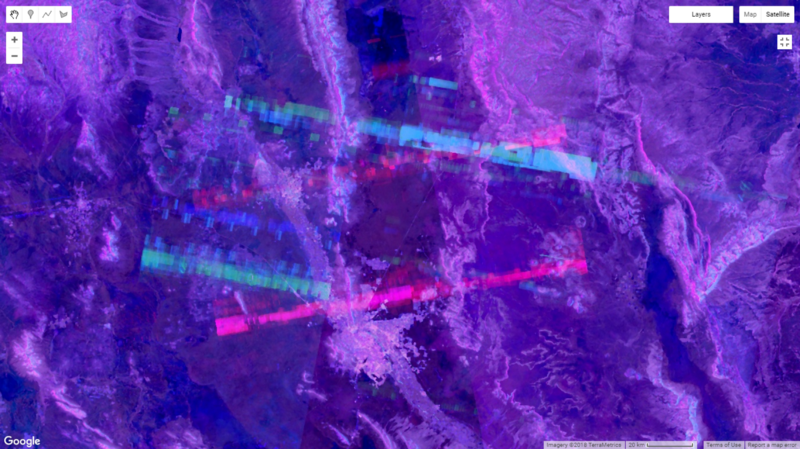
Вспышки, завихрения, крапинки и волны, скриншоты из Sentinel-Hub EO Browser: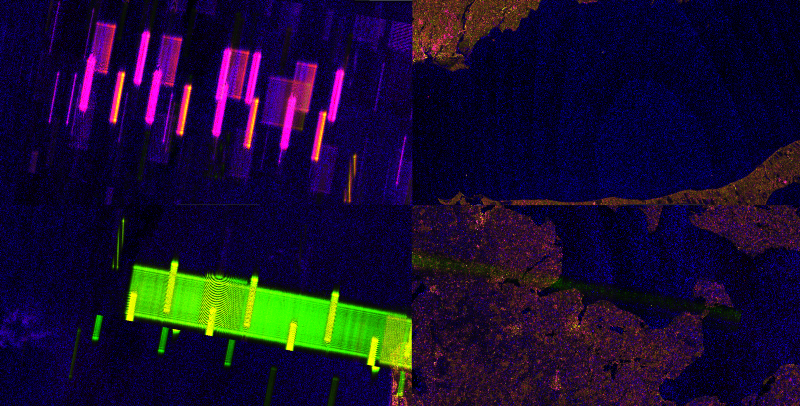
Эти артефакты на изображениях являются результатом помех от более мощных обратных импульсов. Они имеют различные поляризации, размеры и местоположения, но всегда будут иметь основной угол, перпендикулярный направлению полета спутника, таким образом, в данных от спутниках изображения будут иметь два разных угла наклона, основанных на типах орбиты.
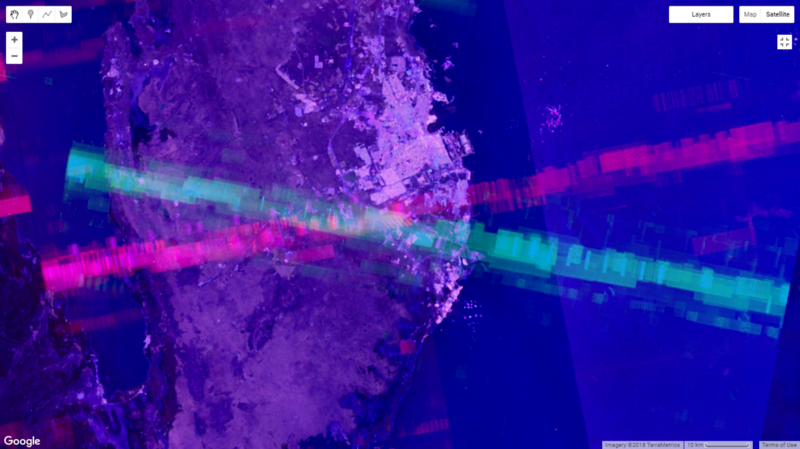
Два абзаца выше я упомянул, что большая часть шума может быть отфильтрована некоторыми способами обработки изображений или многовременным анализом, где для каждого пикселя изображения выбирается самое низкое значение. Когда я попытался совершить такой подвиг в Google Earth Engine, то случайно выбрал максимальное значение, а результаты получились ошеломляющими.
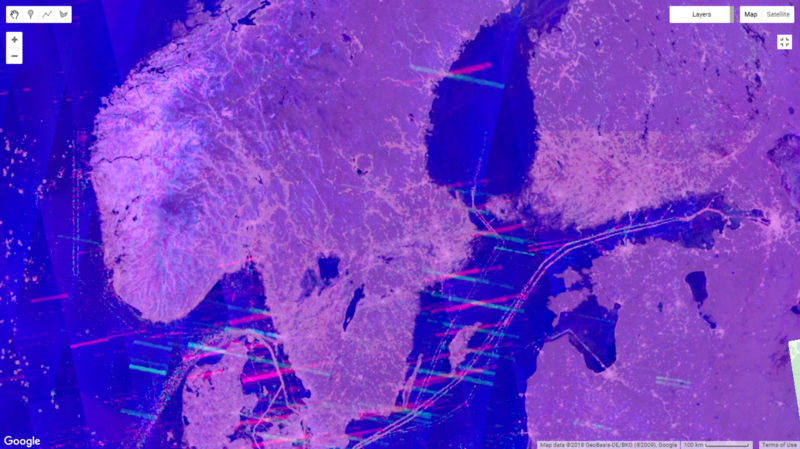
Отображая комбинацию поляризаций VH и VV, эти линии, результат перекрытия восходящих и нисходящих орбитальных помех, последовательно сходятся.
Что же это такое?
В составе оборудования SENTINEL-1 есть инструмент C-SAR(используемый для РСА — радиолокационное синтезирование апертуры), работающий на частоте 5.405 ГГц, которая удобно «сидит» в пределах военной частоты, используемой на Земле (ВДВ и военно-морские радиолокационные системы — 5.250-5.850 ГГц, в том числе РЛС с фазированной антенной решеткой). Следовательно, моя рабочая гипотеза, что есть своего рода наземное вмешательство в данные от SENTINEL-1.
Поэтому, в любой точке мира на карте, где эти артефакты появляются, они могут указывать на местоположение специального оборудования РЛС или другой системы раннего предупреждения, как я покажу.
Подтверждение правильности моего анализа приходит и от других аналитиков GEOINT.
Вот несколько примеров.
Ссылка на скрипт в GEE.
Если у вас нет учетной записи GEE, результаты доступны через GEE Apps.
Скрипт сопоставляет определенный временной интервал изображений, выполняет необходимые фильтры и отображает результат. Чем дольше временной интервал, тем больше «шума» добавляется к результату, а сходимость линий становится более четкой.
Теоретически, если вы ограничиваете временной интервал и дополнительно проведете анализ изображений, то возможно поймать более точные пересечения линий, основываясь на времени появления и исчезновения сходимостей на изображениях, но это может занять несколько дней.
Заключение: данные по наблюдения Земли (EO — Earth Observation data) становятся все более демократизированными и доступными, подобно тому, как Google Earth демократизировала GIS в некотором роде и сделала аэрофотоснимки общедоступными около 15 лет назад. Тем не менее, крайне важно, чтобы компании, организации и страны приспосабливались к такой новой реальности, особенно это важно в тех сферах и направлениях, которые связаны с определенной секретной информацией, которую нельзя просто так раскрывать аналитикам на уровне кресла.
Источник


