
Отцы, дети и биоморфные роботы
1 июня в открытый прокат вышла первая часть фильма “Профессии будущего” о стартапах российских школьников, перспективах и проблемах образования, утечке мозгов и критериях успеха. О фильме рассказал reso_habr, он же опубликовал интервью с одной из героинь. Я тоже решил пообщаться с одной из участниц проекта, Александрой Архиповой, обсудить ней фильм, робототехнику и узнать, как сложилось будущее её биоморфных роботов. Под катом интервью с Александрой и том, куда её привела нелегкая дорожка стартапера.
О фильме и “Илонах Масках” из 10-го класса
Твое мнение о фильме, насколько он соответствует твоим ожиданиям?
В целом фильм понравился, но есть и то, что вызывает желание поспорить. В фильме мы, (пятеро главных героев — прим. редакции), выглядим «Илонами Масками» из 10-го класса. Думаю, что это не стоит буквально воспринимать. Некоторые из героев, кто принял участие в проекте, потом ушли с выбранного до этого пути, кардинально изменили личные приоритеты.

При этом, у фильма очень крутая цель — заразить школьников идеей о том, что они способны изменить мир, сделать что-то значимое, что-то изменить в окружающей действительности. Также меня огорчило, что в фильме нет моей благодарности родителям. Это значимо, так как мой отец очень существенно помог мне с проектом.
Кандидатская диссертация и школьный проект
Фильм не очень подробно описывает ваш проект с технической точки зрения, расскажите подробнее с чего он начался и к чему пришёл впоследствии?
Всё началось с моего отца. Он врач и исследователь. Когда я училась в восьмом классе, он сумел заинтересовать меня своей работой, связанной с движениями в тазобедренном суставе. Я в тот момент начинала интересоваться робототехникой, а отец высказал предположение о том, что результаты его исследования могут стать инновацией в этой области и их можно использовать в школьном проекте.

Потом мы узнали, что есть различные конкурсы и я решила в них участвовать. Я не стесняюсь того, что реализовала именно идею отца и всегда стараюсь упоминать его. Было бы очень странно, если если бы восьмикласснице, которая не изучала анатомию, пришла в голову такая идея.Я начала с изучения шарового шарнира, который можно назвать аналогом бедренного сустава человека.
Расскажи подробнее об этой идее, что тебя заинтересовало?
Идея из области биомеханики. В своей диссертации мой отец написал о роли, которую играет связка тазобедренного сустава в процессе развития нарушений при артрозе. При этом он детально изучил особенности функционирования этой связки и её роль в движении. В нашей совместной работе мы предположили, что использование механизма моделирующего работу связки поможет изменить характер движений биоморфных роботов и снизить энергозатраты на совершение движений.
В то время меня очень впечатляли видео японских роботов и перспективные разработки Boston Dynamics. И я решила, что это то чем я хочу заниматься в жизни. В момент когда в школе предложили сделать какой-нибудь проект я решила посоветоваться с отцом и сказала, что хочу разработать робота или что-то похожее. И он предложил мне эту идею. Ключевым в этом проекте стало применение шарового шарнира с гибкими элементами, прообразами которых как раз были связки тазобедренного сустава. Т.е фактически тогда я начала заниматься инженерной бионикой.
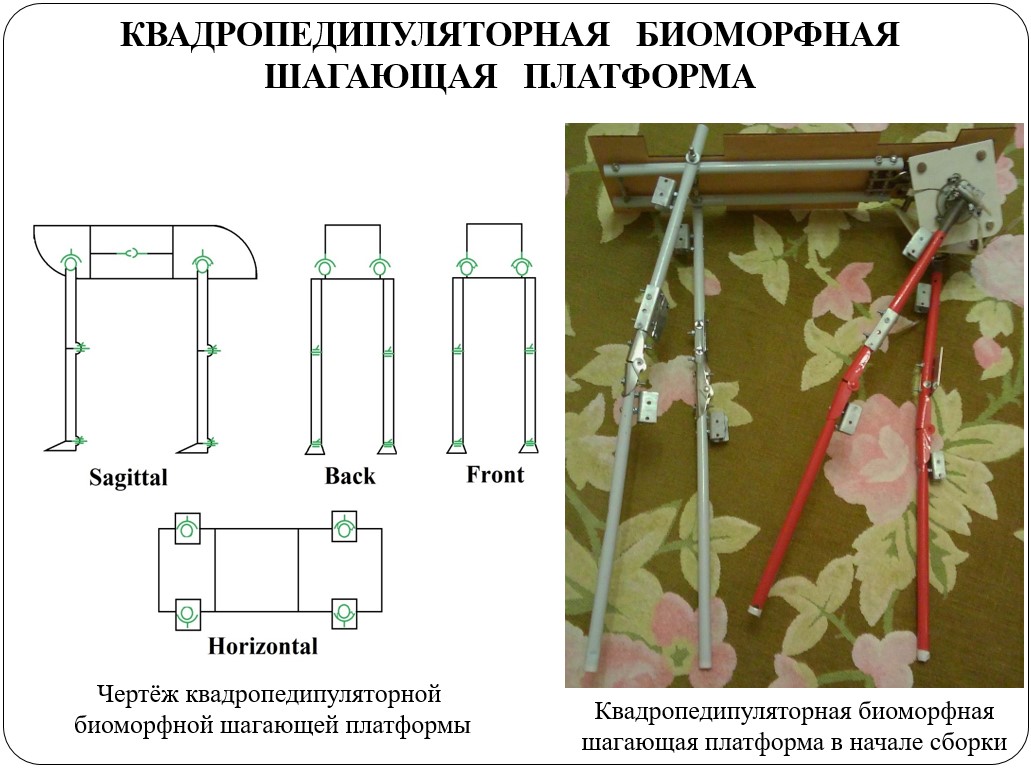
Прототип, который я завершила в 10-м классе не был роботом в привычном понимании. Это была изоморфная двуногая шагающая машина. В процессе создания я много изучала и заимствовала из механических моделей, которые отец строил для диссертации. Машина нужна была для того чтобы оценить дальнейшую перспективу реализации проекта. Она была достаточно простой, шагала при помощи рычагов, соединенных с прототипом системой тросов и тяг. Мы постарались сделать соединение которое частично повторяло физику работы тазобедренного сустава.
Насколько я понимаю первый проект ты делала до того как прошла базовый школьный курс анатомии человека. Возникали ли проблемы с пониманием того, что написано в диссертации отца, как ты выходила из этой ситуации?
Я в меньшей степени была привязана к биологии (анатомии), там больше физики. Нельзя сказать, что мне понадобилось понять диссертацию отца полностью, из неё была частично заимствована идея, но сама диссертация совсем не связана с проектом.
Я двигалась от простого к сложному. Начала с того, что строила графики центра масс, и определяла его траекторию движения. Это было нужно, чтобы построить теоретическую модель будущей шагающей машины.На протяжении всей работы над проектом естественно сталкивалась с моментами, в которых не разбиралась.

Но большинство вопросов всё же касались физики. С этими вопросами регулярно доставала учителей. Например в 11-м классе возникли проблемы с вычислением рычага в шарнире при одноопорном периоде шага.
Сколько всего прототипов было сделано и сколько времени на это ушло?
Всего было пять прототипов, они были сделаны на протяжении 3-х лет. Первые прототипы я собирала вместе с папой, в силу их механической сложности, а также сложности материалов (сталь, фанера).
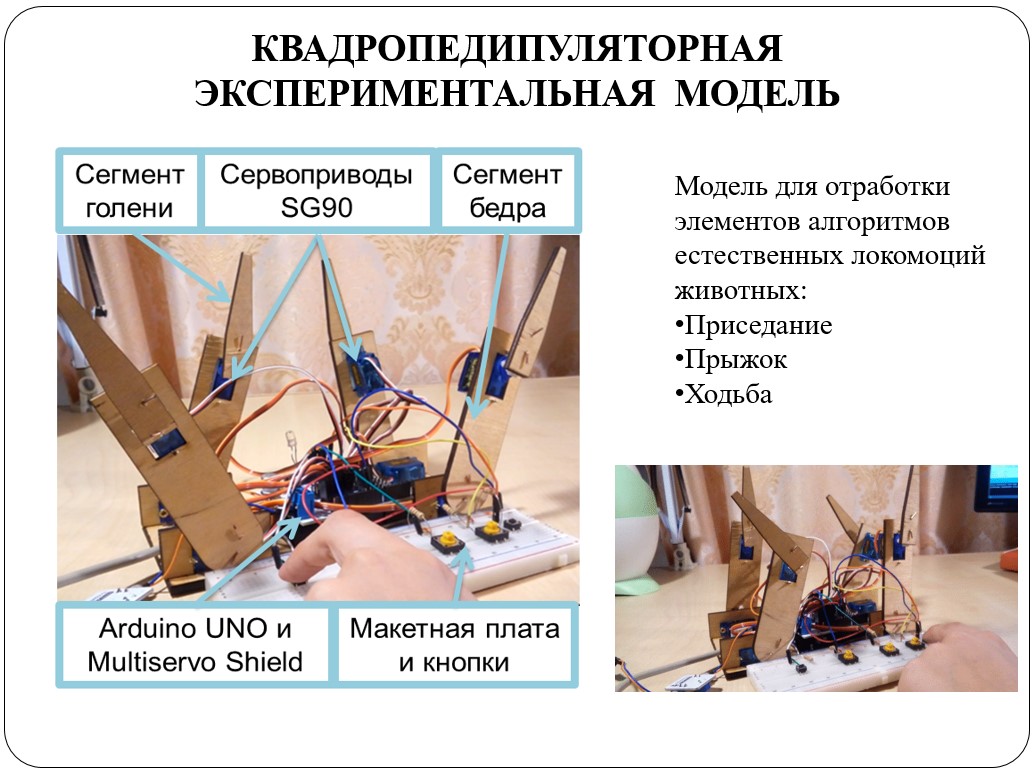
Часть прототипов я проектировала и изготовляла сама в стенах технопарка Кванториум, преподаватели мне помогали именно с технической частью работы (непосредственно с печатью и лазерной резкой). Но при этом электроника, которой были оснащены мои последние 3 модели была полностью выполнена и продумана мной, также как и программное обеспечение к ней.
“Вы врёте!”
Достаточно сложная тема для школьного проекта. Доводилось ли сталкиваться со скепсисом со стороны жюри конкурсов, учителей и т.д.?
Да, с этим я сталкивалась постоянно. Я приходила на конкурсы и там не скрывали недоверия. Считали, что я не делаю в проекте ничего, но просто зубрю какие-то термины. Был конкурс в котором я принимала участие несколько лет подряд, где один старичок в жюри мне в глаза говорил: “Вы врёте”, и всё — я уходила.

При этом я никогда не скрывала, что я делала проект не одна, мне помогал отец и руководитель из моего технопарка КВАНТОРИУМ в Королёве, Смородин Дмитрий Игоревич, он помогал мне решать локальные проблемы, связанные с конструкторскими вопросами. Но нельзя сказать, что всё делали за меня, я самостоятельно разработала модель педипулятора и распечатала её на 3D принтере. Бэкграундом я обязана отцу и научруку, но внушительная часть работы была самостоятельной, поэтому сомнения на конкурсах меня задевали. Да, были сложности, я очень криво собирала.
У меня по началу также вызвало недоверие то, что ты сама все делала — ведь нужно было разбираться не только в бионике, но в электронике, программировании и т.д. Ты использовала готовый код для управления прототипами?
Я не нашла готовые алгоритмы управления приводами для этих прототипов, они возможно, есть в открытом доступе. Поэтому мне в 11-м классе пришлось на базовом уровне осваивать программирование, чтобы их написать. Я узнала как животные переносят ноги пассажем и, написала код для Arduino на упрощенной версии C++, управляющий приводами, для имитации такого движения.

Мне, как программисту, немного стыдно за тот код, сейчас я программирую намного лучше. Но тогда меня хватило, чтобы описать базовое управление приводами. Прототипы не получили систему стабилизации, главным образом в связи с тем, что эта система требовала расчетов, которые я не могла сама провести в 11 классе.
Походка робота “Фёдор” пока не впечатляет, также как и ранние прототипы Atlas
Если представить результат проекта и сравнить его уже с существующими серийными моделями, какие преимущества гипотетически должны возникнуть?
В то время, когда я делала свои первые прототипы у Boston Dynamics, появились первые прототипы Atlas. Сейчас их здорово доработали. А в тот момент ранние варианты прототипов имели серьезные проблемы с походкой, и я даже приводила их для сравнения в 2017-м году.
Когда представляла свой проект на конкурсах, я часто говорила о том, что сегодня у антропоморфных роботов достаточно косолапая походка. Она напоминает походку людей с разрывами связок. Суть же проекта в том, чтобы при помощи аналога связки создать в “суставах” робота рычаги второго рода, благодаря которым в середине одноопорного шага уменьшается давление на поверхность опоры. Это в итоге увеличивает стабильность при передвижении, снижает нагрузку на привод и расход энергии. Т.е основное преимущество — это более оптимизированные движения и как следствие снижение энергозатрат.
Что ты думаешь о российских робототехнических разработках?
Я слышала, что у нас разрабатывали антропоморфного робота Фёдора. К сожалению мне сложно сформировать мнение, потому, что сегодня не очень много доступной информации, особенно не постановочных кадров для СМИ, а записей с лабораторных испытаний. Те видео, где он ходит, меня не очень впечатляют, также как не впечатляла походка ранних прототипов Atlas.
Твое неоднозначное мнение о российских роботах влияет на желание жить и работать в России?
В целом — нет. Я знаю, что в США и Западной Европе у меня возникнут сложности с адаптацией в другой культуре, мне будет тяжело найти общий язык с людьми, у которых другая идентичность, менталитет. Поэтому я хотела бы жить в России. Но я вполне рассматриваю возможность обучения, где-нибудь, в США, а также получения профессионального опыта за рубежом, но не постоянную работу. У меня нет предубеждений на этот счет, просто здесь мне проще понимать окружающих.
К чему всё пришло
Насколько я знаю, сейчас ты не занимаешься тем проектом, который принес тебе известность и сделал тебя героиней фильма, почему?
У меня есть планы вернуться к этой теме позже. Однако с возрастом и опытом понимаешь, что цели таких проектов значительно дальше от реализации, чем мы представляем себе изначально. В данный момент я осознаю, что создание полноценной математической модели для описания того, что я хочу, возможно, несопоставимо по трудозатратам, с экономическим эффектом от прироста КПД и экономии энергии, которые можно получить. Эти размышления пока останавливают меня от того, чтобы продолжать. Мы с отцом подали совместную заявку на изобретение, пока дальше заявки дело не пошло.
Где ты сейчас работаешь, учишься?
Я учусь на мехмате МГУ, вполне вероятно, что этот факультет даст мне специальность которая будет востребована в робототехнике. Также я работаю стажером-программистом в Exoatlet. Они занимаются экзоскелетами, мне это очень близко. Возможно я продолжу там работать.
В качестве заключения
Итак, я наконец увидел настоящего молодого стартапера. Не гения вундеркинда из техно-сказки, а амбициозную молодую девушку, которая готова правдиво говорить о своем вкладе и вкладе других людей, не ищет дешевой славы селфмейдера и на самом деле живёт любимым делом. Особенно отрадно было узнать, что Александра эволюционировала во взглядах на проект и готова признать вероятность корректировки или, даже, перезапуска проекта, что не всегда можно ожидать даже от взрослых представителей стартап движения.
Иными словами, при личном общении я увидел живого человека, молодого инженера, а не стандартный набор “участника грантовых программ”, который благодаря своей активности в проектном движении и попал в поле зрения фильма. При этом, создателям “Профессий будущего” следует отдать должное, без них я бы ничего не узнал ни о Саше, ни о её проектах.
В материале использованы слайды презентаций школьных проектов Александры Архиповной.
Похожие статьи
 Как работают электрические рыбы?
Как работают электрические рыбы? От зефира к фаллосу: как Ридли Скотт спас «Чужого»
От зефира к фаллосу: как Ридли Скотт спас «Чужого» В США разрешили развертывание первой орбитальной группировки космических отражателей
В США разрешили развертывание первой орбитальной группировки космических отражателей Уход Солнца
Уход Солнца WebTV: как интернет пришел на экраны телевизоров
WebTV: как интернет пришел на экраны телевизоров Langflow: лучший визуальный инструмент для создания ИИ-агентов
Langflow: лучший визуальный инструмент для создания ИИ-агентов Математический танец внутри растительных клеток
Математический танец внутри растительных клеток Почему люди ненавидят искусственный интеллект
Почему люди ненавидят искусственный интеллект