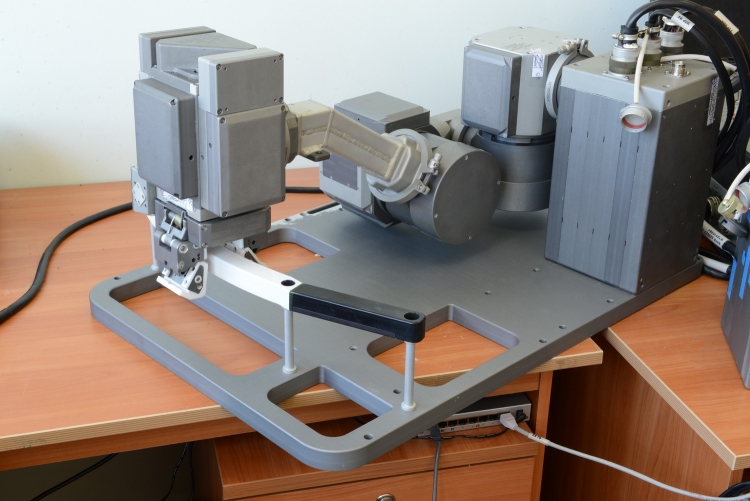
Международная космическая станция (МКС) является полигоном для испытаний новых технологий и научных экспериментов. Как стало известно агентству ТАСС, ЦНИИ робототехники и технической кибернетики (ЦНИИ РТК) планирует провести здесь эксперимент «Захват-Э», включающий испытание руки-манипулятора для будущего робота — помощника космонавтов.

«Точная дата проведения эксперимента пока не установлена. Это связано с тем, что российский сегмент МКС ещё не до конца развёрнут: ожидается выведение лабораторного модуля „Наука“, на котором будет проводиться эксперимент», — сообщили в пресс-службе ЦНИИ РТК.
Отправка на орбиту многофункционального лабораторного модуля (МЛМ «Наука») планируется в конце 2017 года. Затем космический грузовик «Прогресс» доставит на МКС руку-манипулятор (специализированную манипуляционную систему), которую здесь установит более мощный европейский манипулятор ERA (European Robotic Arm), способный перемещать груз весом до 8 тн.
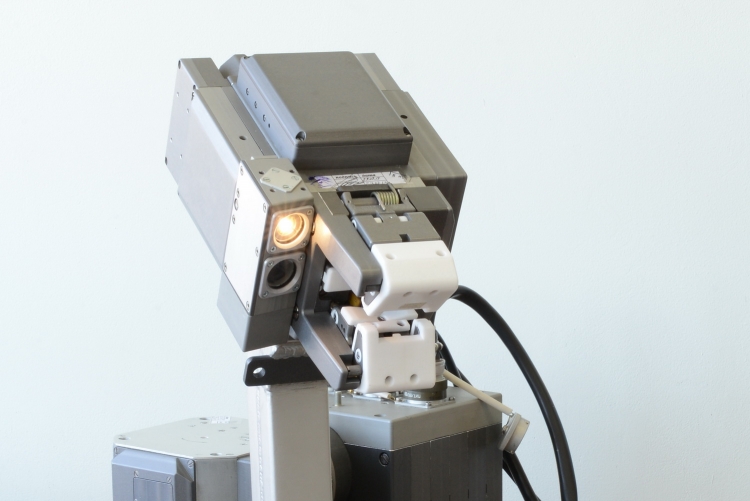
В ходе эксперимента космонавт будет управлять рукой-манипулятором с помощью ноутбука, находясь внутри МКС. Рука-манипулятор будет производить захват имитатора поручня с помощью специального устройства. Сила и качество захвата будет контролироваться благодаря обратной связи. Всего запланировано 30 сеансов работы с манипулятором. После завершения эксперимента на Землю вернут часть оборудования: один шарнир, автоматическое захватное устройство и имитатор поручня, чтобы оценить влияние открытого космоса на механические узлы.
Рука-манипулятор станет частью проекта «Косморобот», над которым работают ЦНИИ РТК, РКК «Энергия» и НПО «Андроидная техника». «Косморобот» должен стать помощником для космонавтов при работе на внешней поверхности космических аппаратов и при выходе в открытый космос. Он будет без проблем перемещаться по внешней поверхности станции, переносить грузы до 200 кг и помогать космонавтам.
Источник:


