
Окружающий нас мир может быть источником вдохновения для любого творческого человека. Художники вдохновляются невообразимой красотой закатного неба, а писателей наталкивает на новый роман вскользь услышанный разговор в метро. Ученые, коих принято считать прагматиками и практиками, также нуждаются во вдохновении, которое может прийти к ним из самых неожиданных мест. Складывание листа бумаги определенным образом для получения какой-то фигурки, т. е. оригами, уже давно служит основой для многих исследований в области инженерии. Ученым удалось создать множество умных материалов и конституций, которые способны взаимодействовать с окружающей средой, но достичь полного цикла «восприятие-решение-действие» (sense-decide-act) пока не удавалось. Причиной этой неудачи является отсутствие блоков обработки информации, которые могли бы взаимодействовать с восприятием и действием. Ученые из Калифорнийского университета (Лос-Анджелес, США) разработали метод создания автономных роботов на базе оригами посредством внедрения датчиков восприятия, вычисления и действия в проводящие материалы. В чем особенность метода данного, и что умели созданные с его помощью роботы? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Роботы-оригами — это автономные машины, созданные с помощью процесса складывания, заимствованного из древнего искусства оригами — складывания двумерных листов или даже линейных нитей в сложные трехмерные объекты. Эта стратегия, основанная на складывании, наделила роботов-оригами преимуществами по сравнению с обычными жесткими и громоздкими роботами, включая быстрое прототипирование, высокую удельную прочность, встроенную совместимость для безопасного взаимодействия с людьми, низкую стоимость и т.д. Тем не менее почти все роботы-оригами по-прежнему полагаются на жесткую полупроводниковую электронику и вспомогательные преобразователи для восприятия, управления и актуации для автономного взаимодействия с окружающей средой.
Эта зависимость от жесткой полупроводниковой электроники часто ограничивает потенциал роботов-оригами. Использование внешней электроникой на основе полупроводников требует системной интеграции, что увеличивает сложность и вес получаемых роботов. Эти недостатки в основном возникают из-за нежелательной передачи информации в электромеханическом интерфейсе. Электроника на основе полупроводников, как правило, уязвима для неблагоприятных воздействий окружающей среды, например излучения и физического воздействия, что ограничивает их применение. Поэтому необходим альтернативный метод для создания оригами-роботов, чтобы достичь автономии путем внедрения датчиков восприятия, вычисления и актуации в совместимые материалы.
Изображение №1
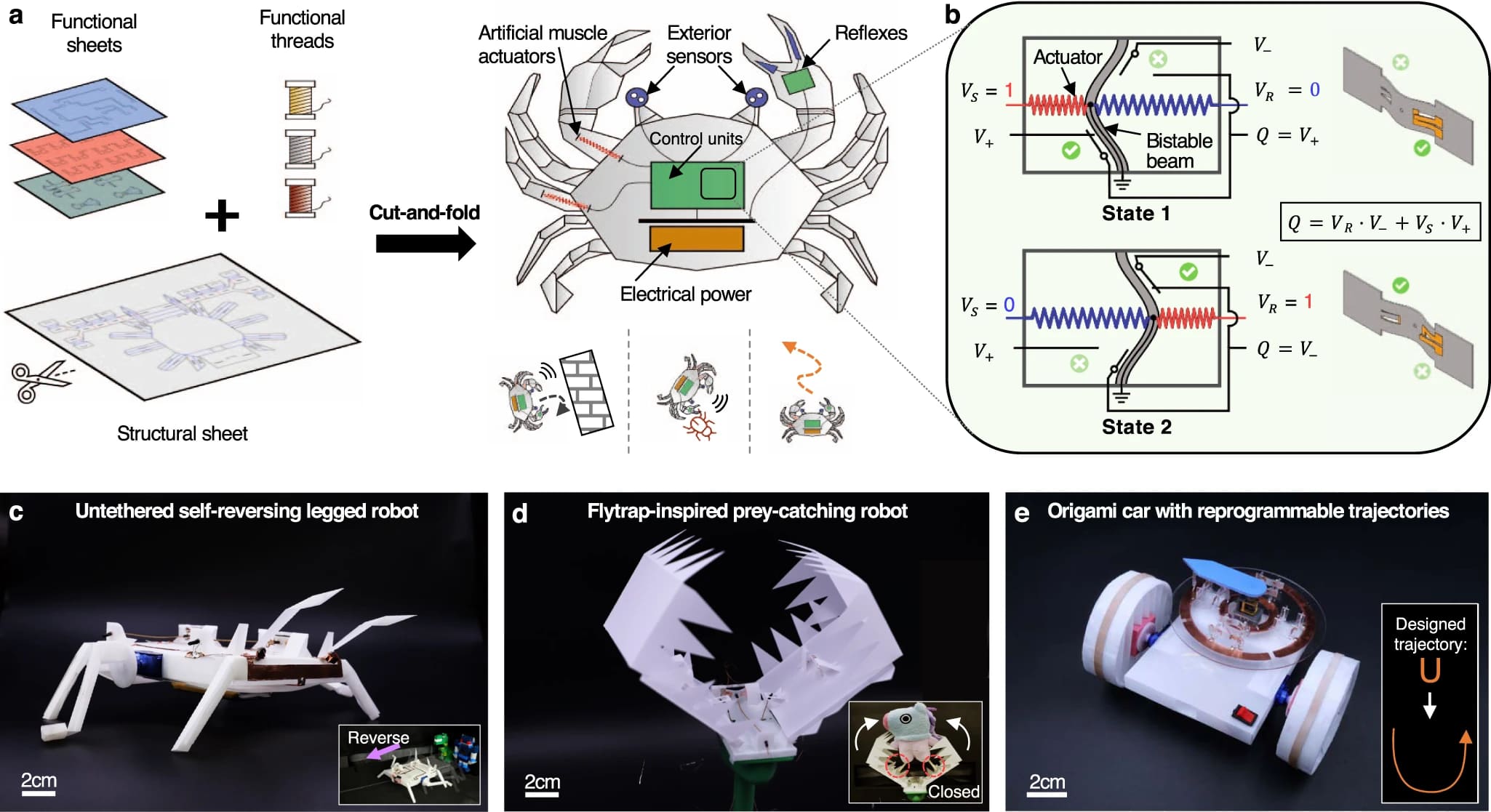
В рассматриваемом нами сегодня труде ученые описывают интегрированный процесс создания автономных роботов-оригами с использованием функциональных проводящих материалов. На 1a показана концепция этого процесса, в котором роботы могут быть полностью изготовлены из листового и нитевидного материалов с помощью обработки «разрезать и сложить» (cut-and-fold) на базе основного механизма включения — мультиплексного переключателя оригами (OMS от origami multiplexed switch, 1b). Получившиеся в результате роботы называются OrigaMechs, сокращенно от Origami MechanoBots.
OMS был создан путем включения бистабильных балок и проводящих резистивных приводов из проводящего сверхспирального полимера (CSCP от conductive super-coiled polymer). На основе OMS были разработаны логические элементы: NOT, AND, OR. Дополнительно были созданы комбинационная логика и схемы, а именно вентили NAND и NOR, чтобы показать способность данной системы к каскадным и более сложным вычислениям.
Результаты исследования
OMS действует как мультиплексор 2-к-1, который выбирает между двумя аналоговыми или цифровыми входными сигналами (V+ и V—) и перенаправляет выбранный вход на основе сигнала выбора (VS) и его комплементарного VR (1b). Логическая функция OMS может быть выражена как Q = VR ⋅ V— + VS ⋅ V+.
OMS в основном состоит из одной бистабильной балки и двух приводов CSCP. Один конец каждого привода прикреплен к бистабильной балке, а другой закреплен на каркасе оригами. Таким образом, приводы могут управлять бистабильным переключателем балки между двумя стабильными состояниями для управления состояниями включения/выключения двух электрических полюсов на балке. Когда балка тянется левым приводом CSCP, она переходит в левое устойчивое состояние с закрытым нижним полюсом и открытым верхним полюсом, что приводит к выходу Q=V+. В противном случае выход изменяется на V—.
Нестабильность мгновенного перехода наделяет переключатель двумя свойствами. Во-первых, состояние переключателя является бинарным («разомкнут» или «замкнут»), что обеспечивает однозначное управление, независимо от неопределенностей, возникающих из-за нелинейного сжатия исполнительных механизмов. Эта функция также позволяет ему работать в качестве фильтрующего датчика касания, когда бистабильная балка подвергается воздействию внешних механических раздражителей. Во-вторых, переключателю требуется питание только тогда, когда он переключается между двумя состояниями. В противном случае он остается в предыдущем состоянии, что значительно снижает потребление энергии. Состояние переключателя контролируется парой приводов CSCP. Переключатель меняет свое состояние, когда соответствующий привод приводит в движение бистабильную балку, достигающую точки переключения. Привод CSCP действует как тепловой и может приводиться в действие за счет джоулевого нагрева.
Конструкция выступов (образующих полюса) на бистабильной балке имеет решающее значение. Два выступа, естественно, опираются на консольные балки. Когда балка находится в любом состоянии, она сжимает соответствующий выступ, отпуская другой. Таким образом, сжатый выступ заставляет замкнуться соответствующий полюс, состоящий из двух выводов из медной ленты. Длина и угол выступов могут быть выбраны таким образом, чтобы контакт начинался и заканчивался в момент переключения состояний балки. Ширина выступа должна быть такой, чтобы она могла оказывать достаточное давление на полюс, чтобы уменьшить контактное сопротивление. Ученые установили, что оптимальные габариты выступа составляют 1.2 мм в ширину, 4.0 мм в длину и ~30° угол изгиба. Линия сгиба выступа была совмещена с границей бистабильной балки. Для текущей конструкции среднее сопротивление в состоянии «ON» составляет 0.6 Ом, а в состоянии «OFF» ~1.2 МОм, что дает особенно высокое отношение ON/OFF (~106).
Изображение №2
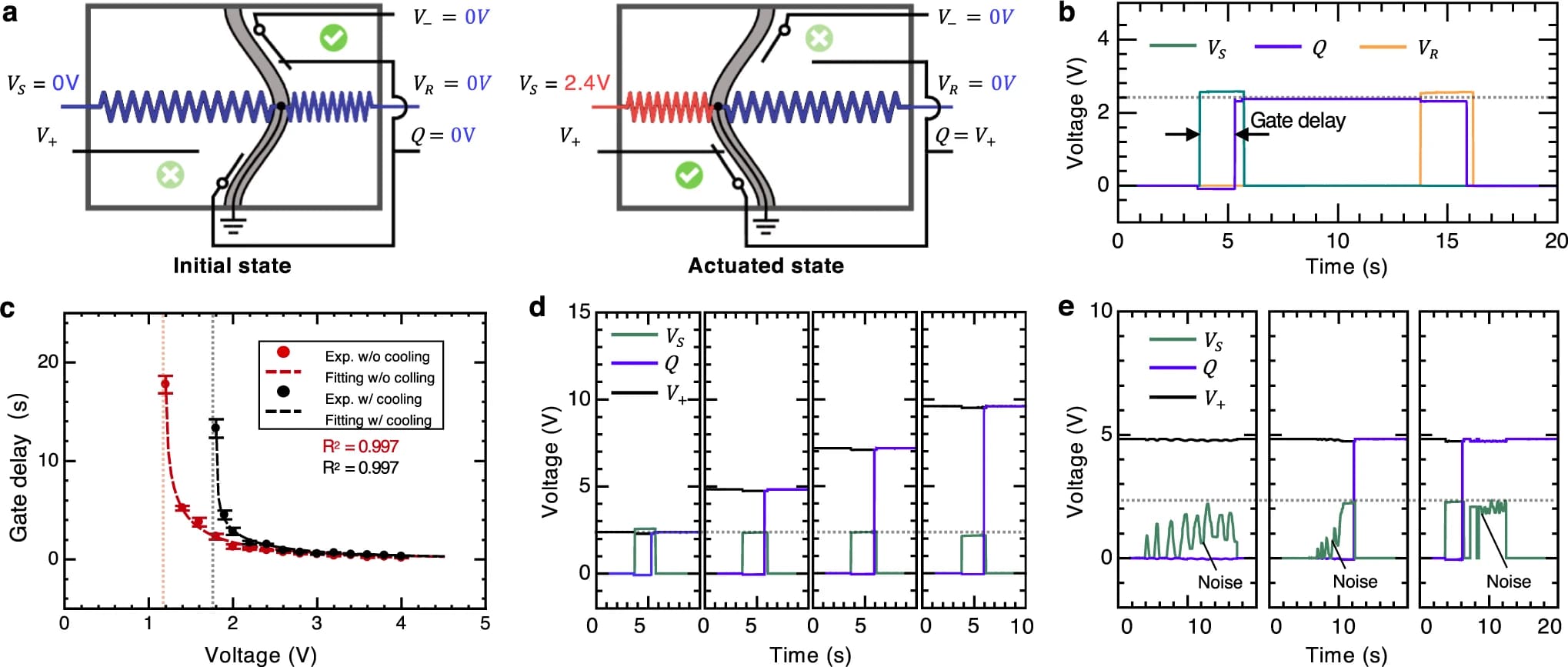
На 2a показана OMS, которая действует как мультиплексор между двумя разными источниками электроэнергии (V+ и V—). V— заземлен, а V+ подключен к постоянному положительному напряжению питания. Первоначально балка находится в правильном стабильном состоянии, выход (Q) переключателя равен 0 В. При подаче управляющего напряжения VS = 2.4 В балка «щелкает» влево, изменяя свой выход на источник питания V+. Когда другое управляющее напряжение (VR) подается на правый исполнительный механизм, балка резко возвращается назад и снова переключает выход на 0 В, возвращая OMS в состояние готовности к следующему циклу работы. На 2b показаны соответствующие изменения напряжения во время цикла работы OMS.
Выход (Q) показывает отставание от управляющего напряжения VS, что обозначается как задержка затвора. При управляющем напряжении в 2.4 В задержка затвора составляет ~1.5 секунды. Задержка затвора в основном зависит от сложного взаимодействия механических, тепловых и электрических свойств OMS, которые могут быть отражены с помощью упрощенной аналитической модели. Для устройства OMS с фиксированной геометрией и материалами задержка в первую очередь определяется амплитудой напряжения VS и условиями охлаждения (2c).
В ходе изучения этих факторов ученые поместили OMS в неподвижный воздух и варьировали амплитуду управляющего напряжения VS. Контролируя выходное напряжение OMS, ученые могли охарактеризовать задержку затвора как функцию управляющего напряжения VS (2c).
Когда напряжение было небольшим, привод не мог нагреться до температуры, достаточной для активации бистабильной балки. По мере увеличения напряжения, когда оно превышало пороговое, OMS становилось работоспособным. Задержка монотонно падала по мере дальнейшего увеличения напряжения, приближаясь к нижней границе в ~ 0.1 секунды.
Путем подгонки экспериментальных результатов задержки затвора в зависимости от управляющего напряжения удалось получить тепловую массу (Cth) и абсолютную теплопроводность (λ) исполнительного механизма, которые составляют 4.48 × 10-2 Вт·с/°C и 1.13 × 10-2 Вт/°C соответственно.
Аппроксимирующая кривая (красная пунктирная линия на 2c) указывает на то, что нижняя граница напряжения составляет около 1.19 В, что очень близко к экспериментальным наблюдениям, т. е. 1.2 В.
При добавлении постоянного охлаждающего воздуха на OMS кривая напряжения-задержки оставалась аналогичной при сдвиге напряжения. Нижняя граница увеличилась до 1.8 В (черная точка на 2c). Аппроксимирующая кривая с охлаждающим воздухом (черная пунктирная линия на 2c) хорошо согласуется с экспериментальными данными, показывая, что тепловая масса и абсолютная теплопроводность исполнительного механизма составляют 4.62×10-2 Вт·с/°C и 2.58 × 10-2 Вт/°С соответственно. Модель предлагает нижнюю границу управляющего напряжения около 1.80 В, что также отлично согласуется с экспериментальными наблюдениями (1.8 В).
Поскольку цепь входа и цепь управления независимы, OMS можно использовать как реле. На 2d показана реакция переключателя на 10-секундные импульсы напряжения V+ = 2.4 В при повышении входного сигнала и напряжения питания до 9.6 В. Реле OMS может управлять выходом с напряжением до 4-кратного напряжения управляющий сигнал. Это реле также можно использовать для управления выходами с гораздо более высоким напряжением благодаря гальванической развязке цепи входа от цепи управления.
Гистерезис балки делает работу этого бинарного переключателя устойчивой к шуму. Шум в управляющем сигнале не будет передаваться на выход, если он умеренный по сравнению с критическим управляющим напряжением (т. е. 1.8 В). Чтобы продемонстрировать это свойство, к левому приводу было приложено три типа импульсов напряжения V+ = 2.4 В (2e).
Первый сигнал представлял собой 20-секундное постоянное напряжение в 0 В, сопровождаемое умеренным шумом. Выходной сигнал не менялся, так как управляющий сигнал с шумом был ниже критического напряжения. Второй сигнал представлял собой импульс с максимальной амплитудой напряжения 2.4 В с добавлением шумов в состояние «OFF». Шум не влиял на выход, пока управляющий сигнал не достиг критического значения переключения. Третий сигнал представлял собой импульс с максимальной амплитудой напряжения 2.4 В с наложением шумов в состоянии «ON». После того как выход переключился в состояние высокого напряжения, шум не изменил своего двоичного значения напряжения.
Для непрерывной работы вентили необходимо сбрасывать после каждого вычислительного выполнения. Этот сброс включает не только переключение бистабильной балки обратно в исходное стабильное равновесное состояние, но также требует снижение температуры приводов до температуры окружающей среды. Таким образом, задержка должна быть более четко определена как время, необходимое для того, чтобы вентиль с полным сбросом изменил свой выходной сигнал на входной. Следовательно, скорость переключения (время между двумя запусками) таких вентилей должна быть достаточно большой, чтобы компенсировать время охлаждения, необходимое для приводов. Как показано на 2c, можно достичь минимальной задержки затвора ~ 0.1 с, что указывает на максимальную скорость переключения ~ 3.2 с при времени охлаждения ~3 с.
Изображение №3
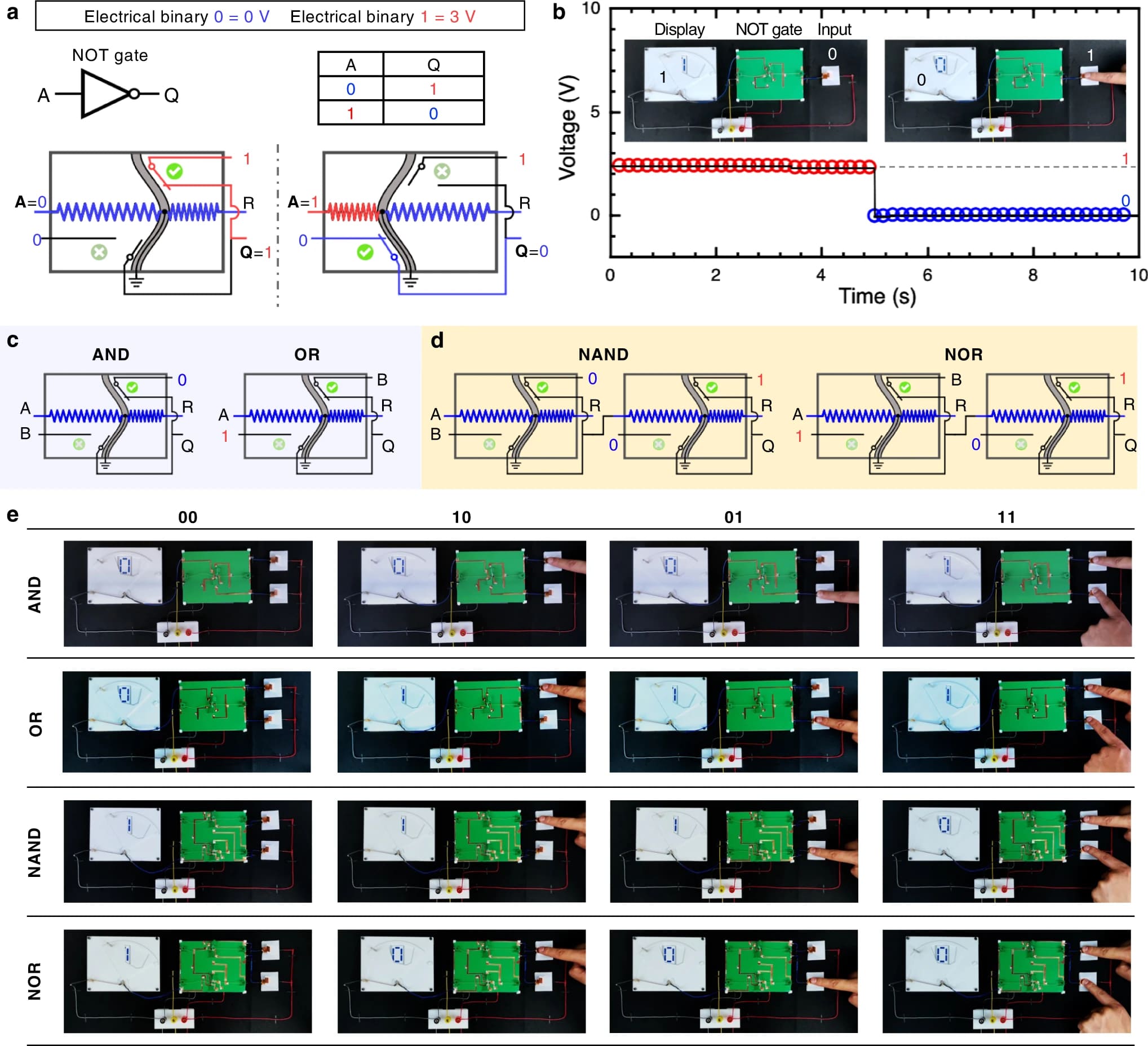
На основе OMS можно реализовать функционально-полную цифровую логическую систему, включающую все три основных логических элемента: NOT, AND и OR. Напряжению 3.0 В было присвоено (для управления CSCP приводами дисплея) двоичное логическое значение ‘1’ и напряжению 0 В — двоичное логическое значение ‘0’.
Вентиль NOT был разработан путем настройки V— как «1» и V+ как «0», что обеспечивает отрицание входного сигнала A, т.е. VS (3a). VR назначается как сброс R. Только когда вход A равен «1», выход NOT изменяется с «0» на «1» из-за щелчка бистабильной балки. Для визуальной индикации выхода вентиля использовался настраиваемый дисплей (3b), на котором отображается «1», когда выход вентиля равен «1», или «0», когда выход вентиля равен «0» (видео №1).
Точно так же логические элементы AND и OR могут быть построены путем настройки соединений входного напряжения на основе OMS (3c). Переключатель настраивается как логический элемент AND, назначая VS как A, V+ как B и V— как «0». В этой конфигурации, только когда оба входа A и B равны «1», вентиль выдает «1». OR строится путем перестановки входов и соединений OMS аналогичным образом — вентиль OR будет выводить «0» только тогда, когда и A, и B равны «0».
Вышеописанные результаты показывают успешную реализацию одиночных логических элементов, но для построения сложных систем потребуются и комбинированные. Благодаря каскадной конфигурации и низкому внутреннему сопротивлению можно соединить несколько OMS напрямую без каких-либо промежуточных звеньев. В результате можно получить составные логические элементы, т. е. NAND (AND-NOT) и NOR (OR-NOT), путем интеграции двух OMS (3d).
Ученые протестировали работу всех логических элементов, включая AND, OR, NAND и NOR (3e, видео №2-5). Более сложные комбинационные схемы, например полусумматор, также возможны за счет объединения нескольких логических вентилей.
Изображение №4
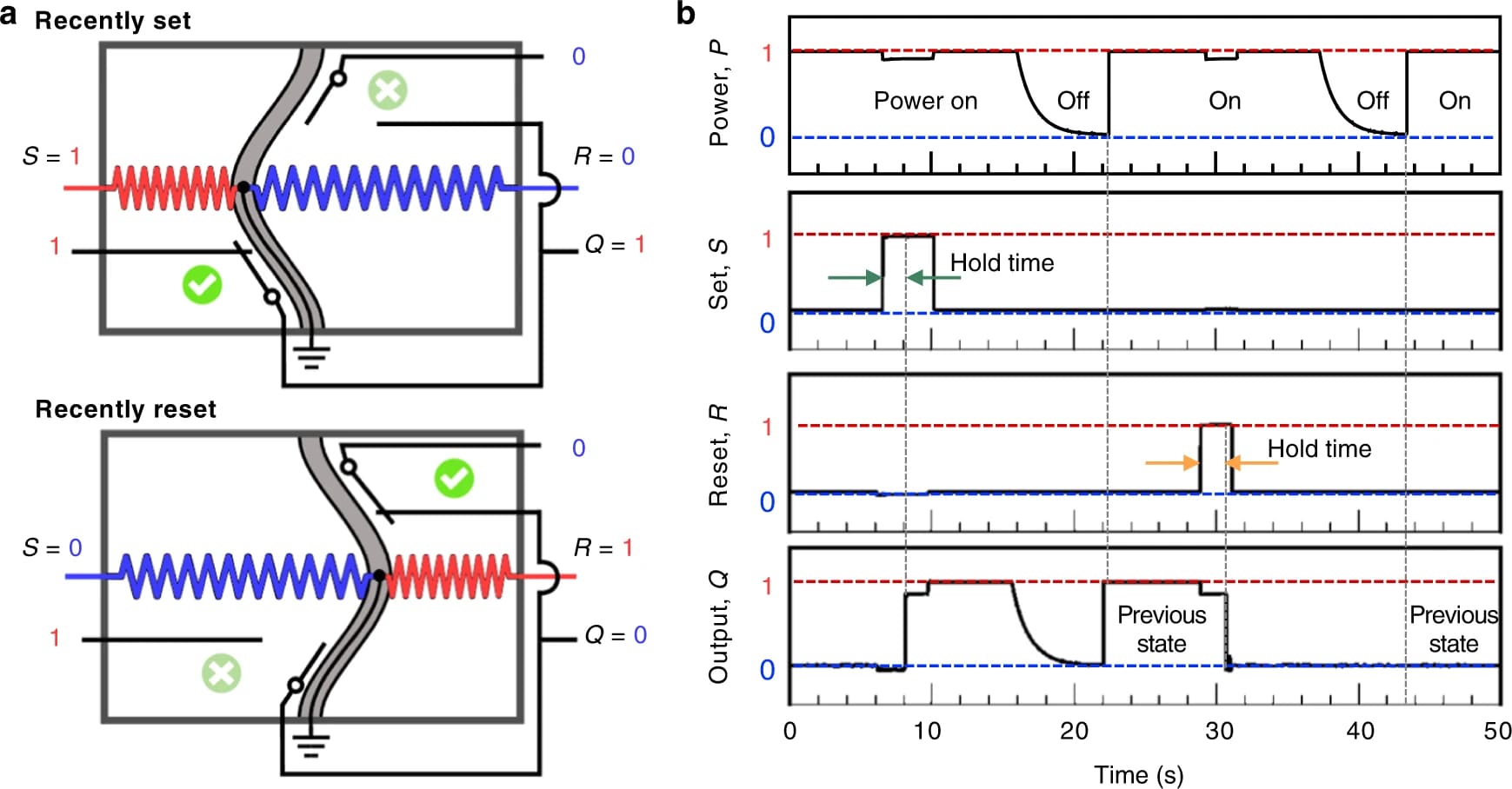
Еще одним важным компонентом автономного управления роботом является энергонезависимая память, которая обычно содержит важные рабочие программы и может выдерживать перебои в подаче электроэнергии.
Ученые сделали простую защелку «Set-Reset» с возможностью постоянного хранения на основе конструкции бистабильного переключателя. Схема защелки S-R показана на 4a, где V+ = 1, V— = 0. В то же время VS и VR реконфигурировались как SET и RESET, что позволяет записывать и стирать информацию внутри устройства памяти (4b).
После подачи питания на устройство происходила запись бита «1» через 6 секунд. Примерно через 1.5 секунды задержки выход Q был изменен, чтобы отразить вход «1» (эта задержка является временем удержания защелки). Затем питание было намеренно отключено, в результате чего выходной сигнал упал до «0». Но чтение сохраненной информации все еще было возможным после восстановления питания. Также возможно стереть/сбросить память (обратно в «0»), активировав R с подающимся питанием. Одно запоминающее устройство способно хранить один бит, т. е. два состояния. С большим количеством интегрированных блоков памяти это позволяет хранить N = 2n состояний, где n — количество битов.

Изображение №5
Чтобы продемонстрировать потенциал OMS в робототехнике, ученые использовали компоненты на основе OMS для управления тремя роботами-оригами:
- робот-мухоловка, который может автономно ощущать, вычислять и реагировать на стимулы окружающей среды, т. е. физическое прикосновение (изображение №5);
- робот-таракан с реверсивным ходом, который может обнаруживать препятствия и менять направление движения (изображение №6);
- робот-колесница, который может двигаться по заданным траекториям, используя перепрограммируемую память (изображение №7).
Венерина мухоловка — хищное растение, способное различать стимулы, исходящие от живой добычи, и стимулы, исходящие не от добычи (5a). Листья (или ловушка) закрываются только тогда, когда в течение примерно 30 секунд было два раздражения триггерных волосков. Эта стратегия закрытия состоит в том, чтобы избежать непреднамеренного срабатывания ловушки неодушевленными предметами, например, опавшими листьями, для экономии энергии.
Ученые создали робота, который частично работает по такому же принципу (5b). Данный робот не учитывает временной фактор стимулов, но может хватать «живую» добычу, так как для активации триггеров необходима подвижная цель. Другими словами, если объект не движется, то робот его хватать не будет.
Робот состоит из двух сенсорных датчиков, одного вентиля AND и двух параллельных приводов CSCP (5с). Он использует сенсорные датчики для получения стимулов из окружающей среды (5d), которые затем передаются на контроллер, т. е. логический элемент AND, для анализа. Это приводит к выдаче исполняемого сигнала на исполнительные механизмы CSCP для управления открытым/закрытым состоянием створок. Только когда активируются два датчика, робот может «распознать» объект его как «живую» добычу и принять решение закрыть свои листья, чтобы поймать ее, сжимая приводы CSCP. В противном случае актуаторы CSCP остаются неактивными (5c).
Сенсорный датчик модифицирован из бистабильной балки (5d), где прикосновение может инициировать мгновенный переход между состояниями on/off. Каждый датчик встроен во внутреннюю поверхность обеих створок (5b). Створки соединены на верхней поверхности вентиля AND через выступы, которые функционируют как петли для движения створок, приводимых в действие исполнительными механизмами. Один конец каждого привода CSCP закреплен на нижней части створки, а другой конец прикреплен к опорной конструкции. Приводы развернуты по диагонали для максимального хода срабатывания (5e).
Затем были проведены практические тесты (5f—5i). Хотя объект попадал в ловушку, робот не закрывал створки, если объект не касался какого-либо из датчиков (5f). Соответственно, выходное напряжение схемы равно 0 В, что свидетельствует об отсутствии сжатия CSCP привода. Даже если бы объект активировал один из сенсоров, робот идентифицировал бы его как раздражитель, не являющийся добычей, поскольку одно прикосновение указывает на неподвижность (5g, 5h). Как только объект активирует оба датчика в двух разных положениях, робот определяет его как добычу и закрывает ловушку (5i и видео №7).
Сигналы напряжения датчика A, датчика B и привода CSCP также предполагают последовательный захват с задержкой ~ 1.7 с (5f—5i). Роботу обычно требовалось несколько секунд (в данном случае 5 секунд), чтобы закрыть створки из-за системной задержки и низкого напряжения питания (2.4 В). Однако скорость срабатывания можно улучшить, увеличив длину приводов CSCP с более высоким напряжением питания, что увеличит скорость привода.
Робот-мухоловка был полностью изготовлен путем вырезания и складывания в стиле оригами из листовых материалов и проводящих нитей (за исключением 3D-печатной опорной конструкции, хотя и ее также можно реализовать в оригами). За счет такой конструкции робот обладает своеобразными полупроводниковым и немагнитным функциям. Это может помочь роботу работать в условиях с сильным изучением или магнитным полем, где обычные электронные компоненты на основе полупроводников работать не смогли бы.
Дабы подтвердить это, робота проверили в различных условиях: статическое магнитное поле в 0.47 Тл; радиочастотный сигнал в 5 Вт; электростатический разряд ≥ 20 кВ; механическая деформация (изгиб и скручивание до 50°).
Результаты показали, что робот мог стабильно выполнять свою задачу (5j), в то время как его полупроводниковый аналог работал со сбоями или даже постоянно выходил из строя (видео №9-12).

Изображение №6
Одной из самых важных функций, которые выполняет биологическая система, является предотвращение столкновений, реализуемая посредством сбора информации об окружающей среде. На эту функцию редко обращают внимание, но без нее движение в пространстве было бы, мягко говоря, проблематичным.
Говоря о роботах, то им такая функция также нужна. Потому ученые создали робота-таракана с реверсивным ходом (6a), который может изменить направление движения по результатам работы датчиков.
Робот-таракан состоит из двух сенсорных датчиков A и B (с соответствующей антенной), одного встроенного контроллера, двух модифицированных моторов постоянного тока и одной литиевой батареи (6b). Датчик касания состоит из двух изначально разъединенных медных полосок, которые при столкновении с антенной могли принудительно замкнуться для передачи сигнала напряжения на контроллер. Этот контроллер состоит из вентиля OR, привода CSCP и двухполюсного переключателя на два направления (DPDT от double-pole double-throw) (6c). DPDT отличается от OMS добавлением еще одного набора цепей на бистабильную балку. Этот переключатель управляет текущим направлением потока между четырьмя портами, переключаясь между двумя различными состояниями (соответствующими вращению ножек против часовой стрелки или по часовой стрелке).
Как только вентиль OR запускается сигналами от датчиков (и антенн), его высокое выходное напряжение заставляет привод CSCP переключать DPDT, дабы изменить направление вращения моторов и, соответственно, изменить направление движения (6b). При отсутствии препятствий робот может непрерывно двигаться вперед. Робот изменит свое направление, когда антенна (представляющая «10» или «01» для входов вентиля OR) либо обе антенны (представляющие «11» для входов вентиля OR) обнаруживают препятствия (видео №6).
Изображение №7
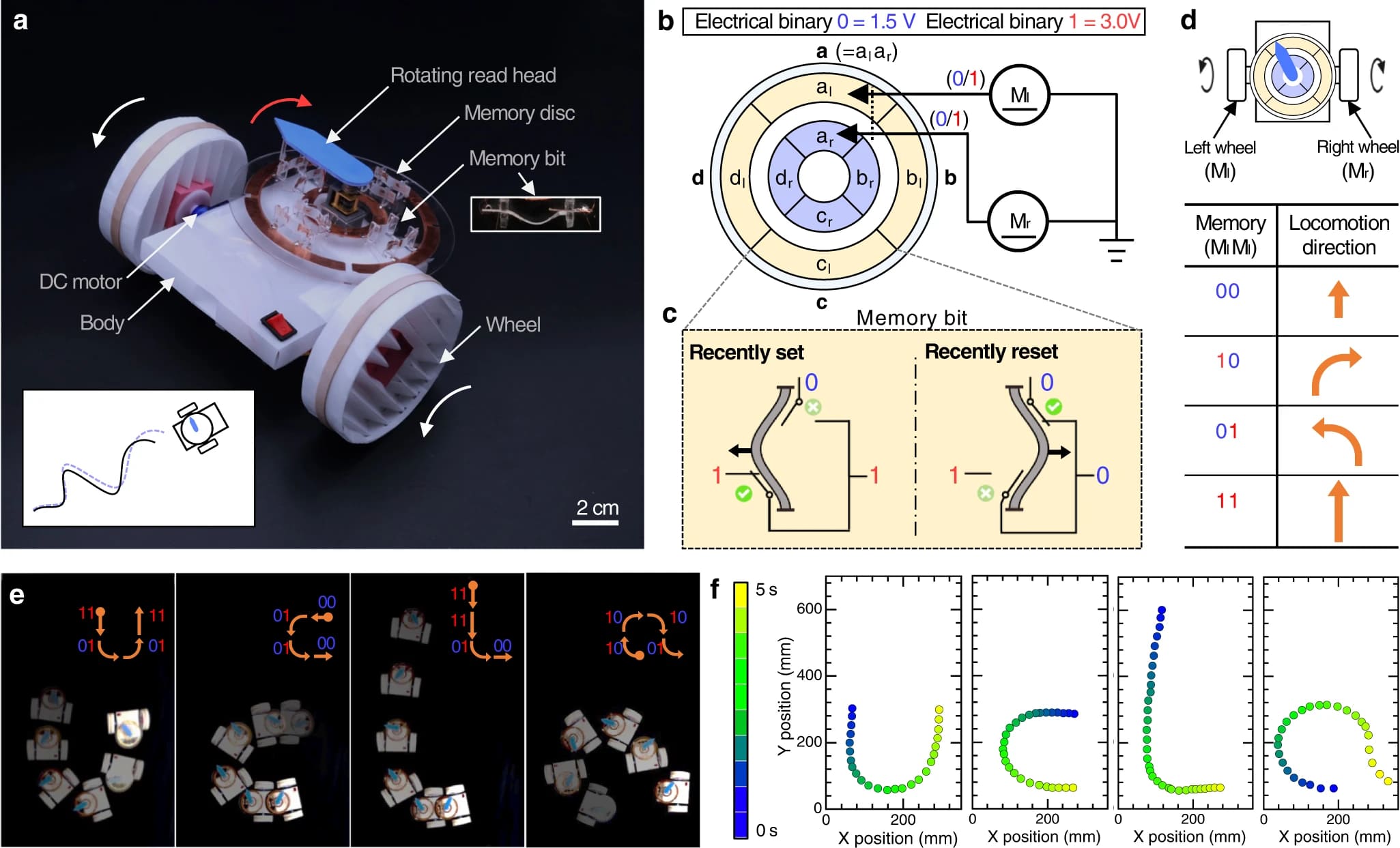
Роботы, которые автономно перемещаются по заданным траекториям без обратной связи, могут использоваться для обнаружения утечек с помощью датчиков газа или выполнять функции наблюдения/поиска с помощью камер. В рамках данного исследования ученые создали третьего робота, который реализует именно такую задачу. Робот-колесница (7а) может следовать заданным траекториям, считывая данные с диска памяти, составленного из OMS. Последовательность информации (битов), записанная на диске, извлекается вращающейся считывающей головкой и затем отправляется на два двигателя постоянного тока, которые приводят в движение самого робота. Варьируя память, робот может двигаться по разным траекториям.
Диск в основном состоит из четырех составных слов памяти, то есть ∣a∣b∣c∣d∣. Каждое слово состоит из двух битов памяти для управления соответствующей парой моторов (7b). Например, слово «a» содержит al и ar (т. е. a = alar); al управляет левым мотором (Ml), ar — правым (Mr).
Когда записанная информация в бите памяти равна «0» (низкое напряжение в 1.5 В), соответствующее колесо вращается медленно. Если же информация равна «1» (высокое напряжение в 3.0 В), то колесо вращается быстро. Базовый бит памяти (7c) был модифицирован из защелки Set-Reset.
Робот-колесница имеет четыре основных режима передвижения благодаря комбинации двух основных битов памяти (7d). Когда оба колеса получают одинаковую информацию, он движется прямо (если оба «0», то движется медленно; если обе «1», то движется быстро). Если информация отличается, то реализуются повороты влево («01») или вправо («10»).
Для демонстрации ученые запрограммировали робота так, чтобы он следовал траекториям движения букв «u», «c», «l» и «a» соответственно, чтобы проиллюстрировать спецификацию его траектории (7e). Информация о XY положении траекторий была извлечена из видео (видео №8) и показана на 7f с отображением времени в виде цвета.
Между операциями память в диске нужно стирать и перезаписывать, переключая состояния бистабильной балки основных битов памяти. Например, память была установлена как ∣a∣b∣c∣d∣ = ∣11∣01∣01∣11∣ для пути ‘u’; он был перепрограммирован как ∣00∣01∣01∣00∣ для «c». Таким же образом память была изменена как ∣11∣11∣01∣00∣ и ∣10∣10∣10∣01∣ для «l» и «a» соответственно.
Видео материалы:
Видео №1
Видео №2
Видео №3
Видео №4
Видео №5
Видео №6
Видео №7
Видео №8
Видео №9
Видео №10
Видео №11
Видео №12
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали новый метод создания роботов-оригами, которых можно наделить самыми разными функциями в зависимости от их конструкции.
Для правильной работы любому роботу необходимо выполнять три основные задачи — восприятие, вычисление и ответ. К примеру, робот оценивает окружающую среду, принимает решение об оптимальном маршруте, обходя препятствия, и выполняет движение. Как правило, жесткие компьютерные чипы, которые традиционно необходимы для обеспечения этих функций, применять для листовых материалов плохая идея, так как они их утяжеляют и предотвращают складывание. Получается, что полупроводниковые компоненты могут быть внедрены в робота-оригами только тогда, когда он принял свою окончательную форму. Следовательно, суть оригами теряется напрочь.
Авторы рассмотренного нами сегодня труда нашли решение этой проблемы путем внедрения гибких и электропроводящих материалов в предварительно нарезанный лист тонкой полиэфирной пленки. Это позволило создать блоки обработки информации, которые можно интегрировать с датчиками и приводами. Затем лист был запрограммирован с помощью простых компьютерных аналоговых функций, имитирующих функции полупроводников. Полученная система может быть использована для создания роботов-оригами, что ученые и сделали.
OrigaMechs, как их прозвали сами ученые, получили свои вычислительные возможности от комбинации механических мультиплексированных переключателей и логических элементов, таких как «AND», «OR» и «NOT». Переключатели включали механизм, который выборочно выдавал электрические сигналы в зависимости от переменного давления и тепла, поступающего в систему. Для демонстрации были построены три робота: мухоловка, таракан и колесница.
Робот-мухоловка мог захватывать объект, если тот активировал оба его датчика. Робот-таракан мог двигаться вперед, а в случае контакта датчиков (антенн) с препятствием двигался обратно. Робот-колесница мог перемещаться по заранее заданной траектории.
Каждый из этих роботов был лишен микросхем, что позволяет им работать в экстремальных условиях, где традиционная электроника вышла бы из строя. Роботов-оригами не волнует сильное излучение, магнитное поле, радиочастотные сигналы или электростатические разряды.
Подобные роботы могут быть быстро изготовлены и оснащены всем необходимым для выполнения необходимых функций. Даже вопрос транспортировки собранных роботов-оригами разительным образом отличается от классических, так как их можно перевозить в практически плоской упаковке, что сильно экономит место. Такая особенность была бы весьма кстати для космических миссий.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


