
Самым банальным, хоть и вполне логичным отличием живого от неживого является движение. В первом случае движение в той или иной степени осуществляется самостоятельно, а во втором — только за счет влияния внешних сил. Бег гепарда или рост дерева — это динамика, которая контролируется ими самими, а вот камень сдвинется с места, только если кто-то его сдвинет. Динамика движений различных систем, будь то биологическая или механическая, позволяют не только понять эти системы, но воссоздать их в более реалистичном виде. Это особенно важно для робототехников, которые из года в год создают то роботизированных собак, то роботизированных рыб. Естественно, главным источником вдохновения для таких разработок является природа. И если динамика движения собаки или рыбы может быть довольно проста для понимания и моделирования, то некоторые существа заставляют ученых задуматься. Это высказывание применимо и к ногохвостикам, которые способны выполнять умопомрачительные акробатические этюды с невероятной скоростью и точностью. Ученые из Технологического института Джорджии (США) решили изучить динамику прыжков ногохвостиков. Эти миниатюрные создания способны прыгнуть с поверхности воды, сделать сальто в воздухе и приземлиться на лапки. За счет чего ногохвостики так здорово прыгают, какова динамика их прыжков, и как понимание этого можно применить на практике? Ответы на эти вопросы мы получим из доклада ученых.
Основа исследования
Ногохвостики или коллемболы (Collembola) — это класс мелких членистоногих из надкласса шестиногих, насчитывающий порядка 8000 видов. Габариты этих существ весьма скромные — от 1 до 5 мм (самые мелкие виды — 0.1 мм, а самые крупные — до 17 мм). Обитают эти малыши практически везде: в земле, в траве, на деревьях, в мхах и лишайниках, на поверхности водоемом и т.д. Питаются ногохвостики по большей степени отмершей органикой, грибами и водорослями.
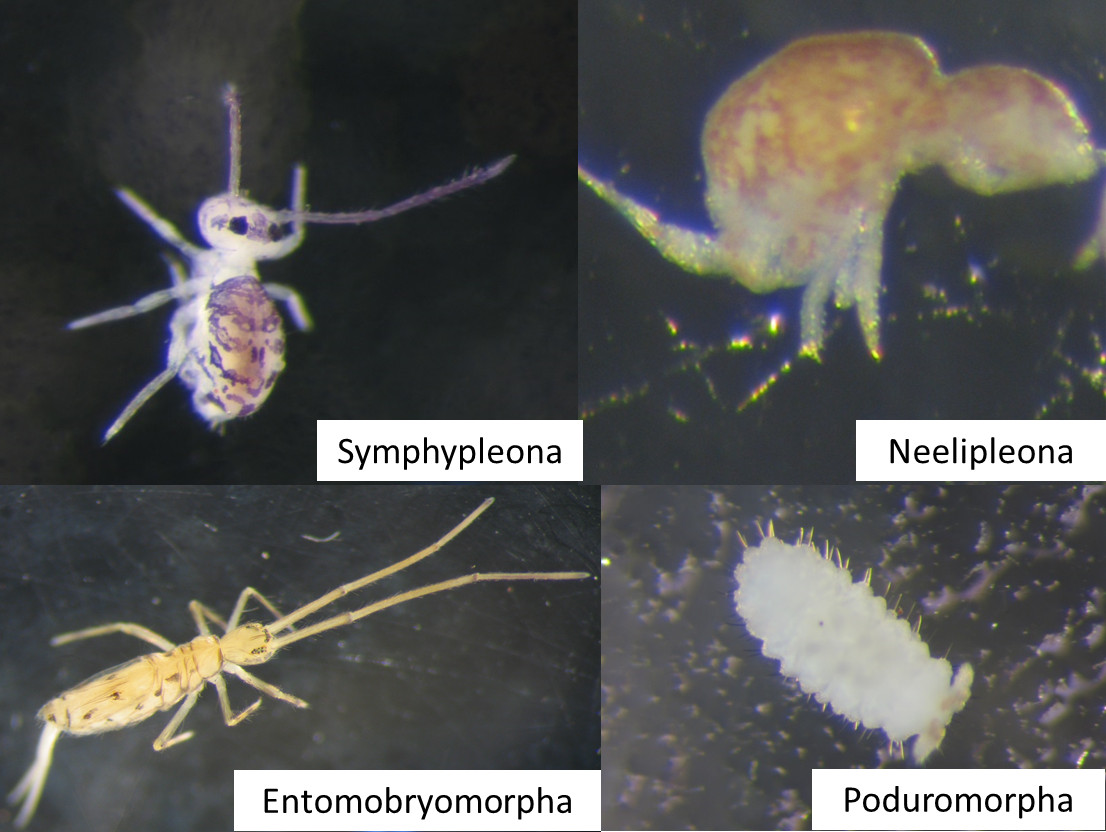
Несколько примеров разнообразного внешнего вида разных ногохвостиков.
Отличительной особенностью коллембол является умение прыгать за счет фурки (прыгательная вилка) — прыгательный отросток вилкообразной формы на нижней части брюшка. Этот талант неоднократно был объектом исследований, результаты которых были довольно неоднозначные. К примеру, биомеханические исследования показали, что прыжки ногохвостов, и особенно их приземление, неконтролируемы и непредсказуемы, учитывая, что эти бескрылые членистоногие могут совершать впечатляющие вращения тела в воздухе (около 500 Гц). А вот поведенческие и экологические исследования показывают, что эти крошечные членистоногие могут выполнять сложные маневры, навигацию и последовательную посадку. Другими словами, они полностью контролируют этот процесс. Одним из доказательств этого стало наблюдение за миграцией снежных ногохвостов, когда порядка 300 000 особей прыгали в четко определенном направлении с контролируемым приземлением.

Прыгательная вилка ногохвостика.
Исследование тела ногохвостика с помощью сканирующего микроскопа показало, что коллофор* может быть использован для прилипания к поверхности воды, очистки и поглощения питательных веществ. Коллофор также может играть ключевую роль в управлении направлением и траекторией прыжка.
Коллофор* — трубкообразная структура на вентральной стороне первого брюшного сегмента тела ногохвостов.
Математический анализ и вычислительное моделирование показали, что изменение длины вилки может влиять на вертикальный и горизонтальный диапазон, достигаемый во время прыжка.
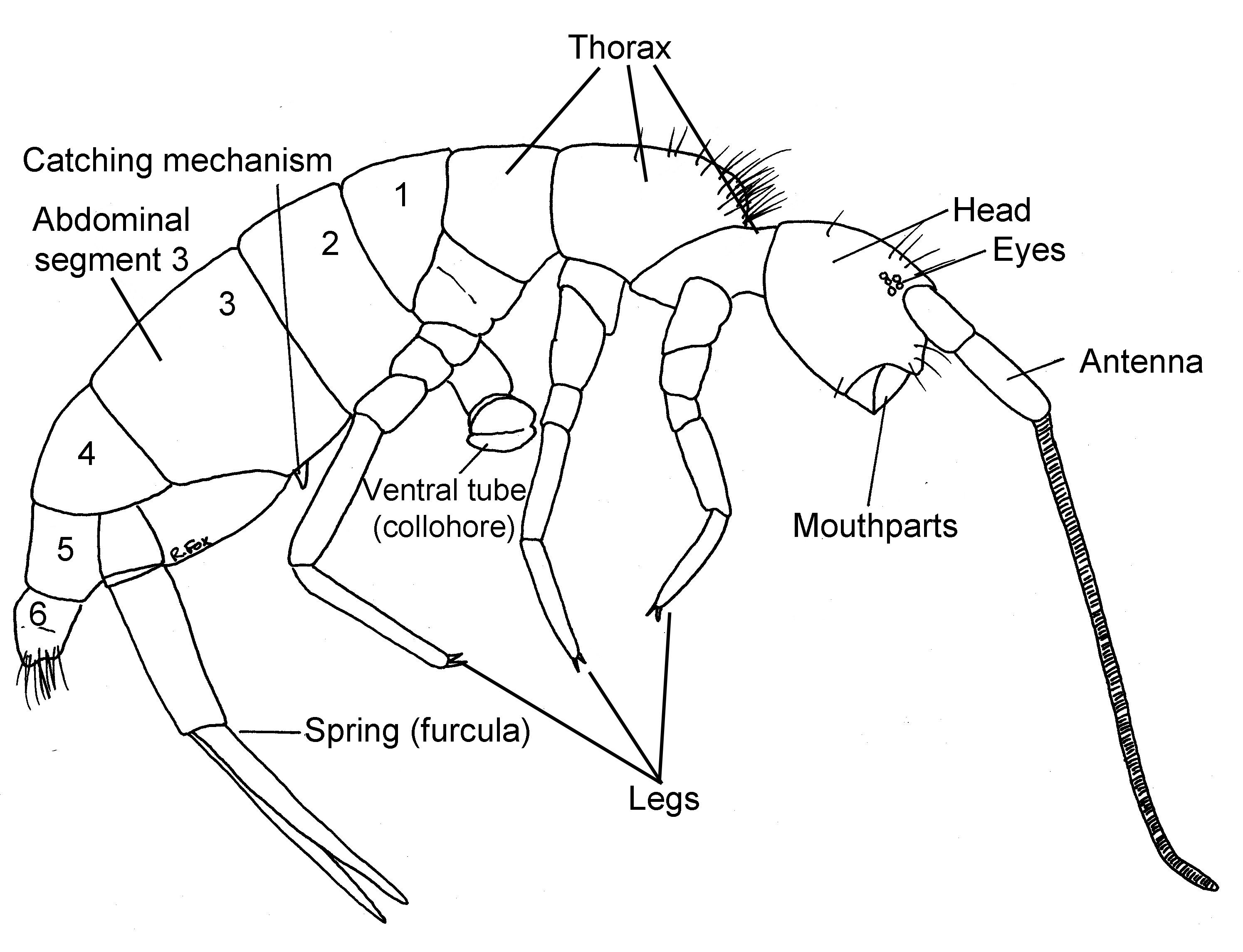
Схематическое описание строения тела ногохвостика.
Однако этих выводов оказалось недостаточно, чтобы создать единую теорию, объясняющую, как именно ногохвосты могут контролировать прыжки и приземления.
Ученые отмечают, что воздушное выравнивание (выпрямление) — широко используемая стратегия управления в полете. Она используется животными, а также разносимыми ветром семенами, чтобы получить благоприятную ориентацию в воздухе и, следовательно, во время приземления. Самовыпрямление было изучено у бескрылых млекопитающих, рептилий, насекомых и паукообразных, но никогда не сообщалось об этом у шестиногих, таких как ногохвостки. В совокупности эти исследования показывают, что самовыравнивание зависит от размера.
Крупные животные, такие как кошки или гекконы, восстанавливаются из перевернутого положения, используя инерционные реакции своего тела, отдельных конечностей или хвоста. Напротив, насекомые, такие как личинки палочников и взрослые особи саранчи, для исправления ориентации тела полагаются на аэродинамические реакции, производимые их придатками.
Изображение №1
Соответственно, само собой разумеется, что животные миллиметрового размера, такие как ногохвостки, могут использовать аэродинамические силы для восстановления после неблагоприятной перевернутой ориентации. Тем не менее выпрямление в воздухе у ногохвостов может быть динамически более сложным, чем выпрямление в свободном падении, потому что коллемболы должны внезапно уменьшить быстрое вращение тела в воздухе, чтобы получить благоприятную ориентацию во время столкновения с поверхностью. Амортизация и сцепление с поверхностью воды во время приземления также имеют решающее значение для выполнения последующего контролируемого прыжка, который кажется сложным даже для крылатых насекомых. Без каких либо механизмов контроля ногохвостики будут бесконтрольно подпрыгивать, причиняя потенциальный физический ущерб самим себе, а также увеличивая вероятность того, что хищникам будет проще их поймать.
Небольшая демонстрация описываемого исследования.
В рассматриваемом нами сегодня труде ученые решили установить и описать механизм контроля, который ногохвостики используют для регулирования своего положения тела во время прыжков и приземлений на поверхность воды.
Результаты исследования

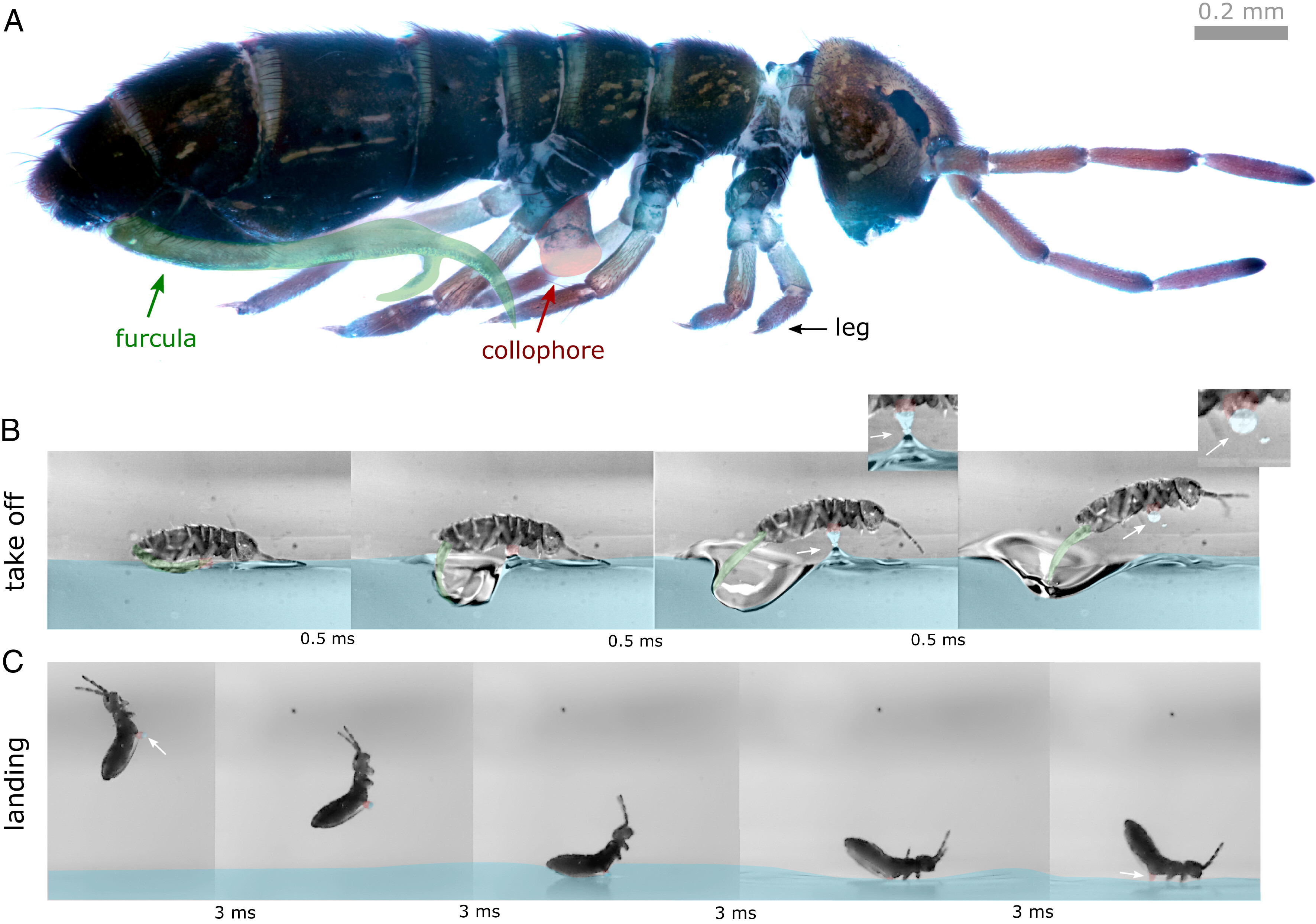
Изображение №2
Перед прыжком ногохвостики закрепляются на поверхности воды с помощью коллофора (изображение №2 и видео №1). Было обнаружено, что некоторые особи сгибались перед прыжком, что опускало кончик брюшка и, следовательно, вилку (2A). Во время подпрыгивания гидрофильный коллофор улавливает небольшую каплю воды (1B), которая играет важную роль как при выравнивании в воздухе, так и при приземлении. После подпрыгивания эти согнутые особи прыгали по вертикальным траекториям и с большой скоростью. Напротив, другие особи держали тело прямо и приподнимали кончик брюшка над водой (2B). В этом случае траектории ногохвостов были горизонтальными и значительно более медленными. В некоторых случаях особи передвигались по поверхности воды, не отрывая коллофор от поверхности. Такие особи умели прыгать по поверхности воды, часто приводя в действие свои вилки. Они развивали скорость движения до 28 см/с (∼280 длин тела в секунду), а также создавали вихревой след со скоростью течения и завихренностью до 50 см/с и 150 л/с соответственно (3A и 3B; видео №1). Также было замечено, что ногохвостики, движущиеся горизонтально по воде, используют свои лапки, чтобы регулировать направление рыскания перед каждым прыжком.
Видео №1
Дабы количественно оценить эти наблюдения, было оцифровано 27 высокоскоростных записей прыжков ногохвостиков. В итоге была обнаружена линейная зависимость между углом наклона туловища в начале прыжка (θ) и нормированной на длину тела высотой живота Habdomen (θ = 17 − 7 x Habdomen, r2 = 0.82, F1,25 = 113, p ≪ 0.001). Это показывает, что насекомое может изменить Habdomen, изменив угол θ, который также определяет кинематику подпрыгивания. Угол подпрыгивания (φ = 39 + 2.6θ, r2 = 0.83, F1,25 = 124, p ≪ 0.001) и скорость подпрыгивания (u = 381 − 16 х θ, r2 = 0.57, F1,25 = 33.5, p ≪ 0.001) были линейно связаны с углом тела (θ). Кроме того, скорость подпрыгивания (u) зависела от угловой скорости вилки (u = −161 + 0.3 х ωfurcula, r2 = 0.74, F1,25 = 62, p ≪ 0.001). Напротив, средняя угловая скорость вращения тела (ω) была слабо связана с θ (ω = 180 + 9 х θ, r2 = 0.4, F1,25 = 17, p ≪ 0.001).
Чтобы понять, может ли ногохвостик контролировать ориентацию своего тела во время подпрыгивания, ученые построили математическую модель, предсказывающую движение насекомого на основе ньютоновской механики. Внешние силы, которые вызывают действие, включали движение от вилки, адгезию от коллофора и гравитацию. Основное внимание уделялось ориентации тела (θ), скорости открытия вилки (ωfurcula) и адгезии (kc).
На 2E показано, что, когда положение тела фиксировано, модель предсказывает, что скорость подпрыгивания увеличивается вместе со скоростью вилки. Такое предсказание отлично согласуется с экспериментальными наблюдениями. На 2F и 2G показано, что при фиксированной скорости вилки насекомые действительно могут управлять кинематикой своего подпрыгивания, контролируя положение тела.
Несмотря на относительно плавный переход, можно выделить два режима: горизонтально направленное движение (HDM от horizontally directed motion) может быть реализовано при отрицательном θ и вертикальное воздушное движение (VAM от vertical aerial motion) при больших положительных значениях θ.

Изображение №3
Ногохвостики, использующие HDM (как на 2B), «взлетают» под углом ближе к поверхности воды и с меньшим вращением. Можно предположить, что адгезия коллофора происходит из-за процесса дренирования тонкой пленки вокруг коллофора. Следовательно, адгезия пропорциональна скорости втягивания коллофора и толщине водяной пленки. Для HDM наличие коллофора позволяет насекомому подпрыгивать еще ближе к поверхности и еще меньше вращаться. На самом деле адгезия коллофора необходима для того, чтобы ногохвостики в принципе могли «прыгать» по поверхности воды (изображение №3).
С другой стороны, ногохвостики, использующие тактику VAM, прыгают с более высокими переходными и угловыми скоростями, а также направлены вертикально (2A). Оба режима были обнаружены в экспериментах и подтверждены математической моделью.
В совокупности эти результаты уже говорят о том, что коллемболы могут контролировать скорость своего взлета, контролируя скорость раскрытия вилки. Также они могут контролировать направление прыжка и вращения, контролируя свою ориентацию в пространстве.
На 2E–2G показано, что коллофор не влияет на скорость подпрыгивания, направление или вращение для режима VAM (большое значение θ). Лишь одна особь продемонстрировала очень небольшое вращение тела при вертикальном прыжке (2G и видео №1).
Важным фактором успешности прыжка была адгезия коллофора, которая способствовала режиму HDM и улавливала небольшую каплю воды, необходимую для самовосстановления после подпрыгивания. Чтобы количественно определить эту силу сцепления и массу захваченных капель, ученые провели эксперимент, в котором помещали отдельных особей на вращающийся диск.
Особи подпрыгивали с ускорением 50 ± 30 м/с2. Скорость подпрыгивания составила 1.1 ± 0.4 м/с. Используя ускорение и массу тела, было установлено, что коллофор прикрепляется к поверхности с силой сцепления ~7 ± 4 мкН. Количество воды, собранной коллофором с учетом размеров коллофора и прикрепленной капли, соответствовало ∼3% массы тела насекомого (1B).

Изображение №4
Далее ученые уделили внимание «полету» ногохвостиков, вернее этапу прыжка, когда насекомые находились в воздухе. Ногохвостики во время прыжков достигали горизонтального и вертикального расстояния 3 ± 1 см (36 ± 12 длин тела) и 1.1 ± 0.3 см (∼12 ± 4 длин тела) соответственно (4A). Угол подпрыгивания составил 47 ± 10°, максимальная частота вращения тела — 71 ± 42 Гц, а продолжительность полета — 17 мс. Скорость центра тяжести при приземлении (48 ± 9 см/с) уменьшилась на 25% по сравнению со скоростью при подпрыгивании (63 ± 7 см/с) (4D). После прыжка особи деформировали тела в U-образную форму при 15 ± 6 мс, а вилка закрывалась в воздухе при 26 ± 11 мс (4C). Было обнаружено, что 85% особей приземлялись на брюшную сторону, несмотря на высокую частоту вращения тела в воздухе после прыжка (4B). Совокупные данные говорят о том, что насекомые очень рано во время прыжка принимали U-образную форму, снижали скорость вращения (4C) и корректировали положение тела, чтобы подготовиться к вентральному приземлению.

Изображение №5
Чтобы проверить гипотезу о самовосстановлении в воздухе, ученые поместили как живых, так и мертвых ногохвостиков в вертикальную аэродинамическую трубу (скорость потока ∼1 м/с) (5A–5C; видео №3). В обоих случаях насекомые начинали падение спиной вертикально вниз. Живые особи меняли свою ориентацию брюшной стороной вниз сразу после принятия U-образной формы. Это выравнивание в воздухе произошло менее чем за 20 ± 2 мс (5D), что является самым быстрым из когда-либо измеренных значений у животных. Вилка оставалась вытянутой во время воздушных маневров, в то время как усики втягивались назад, а лапки выпрямлялись.

Изображение №6
Чтобы понять, как U-образная форма и капля воды влияют на выпрямление ногохвостиков, ученые провели эксперименты по свободному падению с использованием трех моделей пластиковых полосок (U-образная форма с каплей, U-образная форма без капли и плоская полоска) (6A).
Обе U-образные полоски пассивно исправили свое перевернутое положение в воздухе, чтобы, наконец, приземлиться на вершину (6B–6D). Тем не менее в U-образных полосах с каплей наблюдалось более быстрое выравнивание и меньшее изменение угла при вращении, чем без капли. А вот плоские полоски при свободном падении приземлялись на землю под разными углами.
Эти результаты подтверждают, что деформация тела и капля, собранная коллофором, помогают ногохвостикам восстановиться после перевернутого положения тела в воздухе.
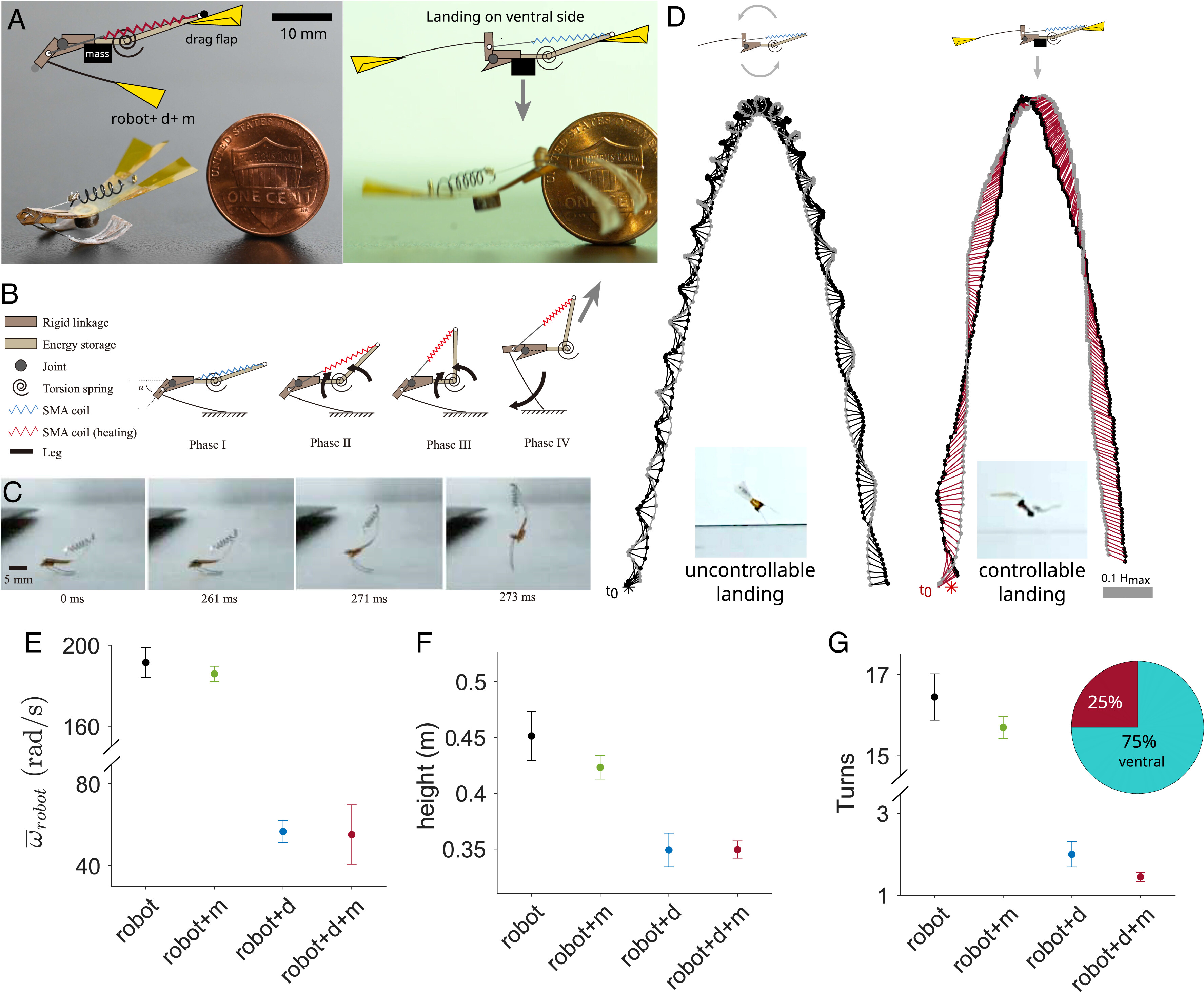
Изображение №7
Далее ученые разработали прыгающего робота (86 мг), который имитирует катапультирующий механизм ногохвостиков, состоящий из легкой конструкции и привода для реализации прыжковой функции (7A).
Робот активируется путем нагрева катушки из сплава с памятью формы (SMA от shape memory alloy), которая создает напряжение и внезапное раскрытие ноги (структура, подобная фуркуле), катапультируя робота в воздух (7A–7C).
Данная версия робота никак не меняет свое положение тела или его форму в воздухе, чтобы скорректировать приземления, как это делают настоящие ногохвостики.
Потом было создано три модификации робота, чтобы изучить, как сопротивление (U-образная форма) и дополнительная масса (капля) влияют на эффективность приземления. Модификации были следующими (7C и видео №2):
- робот с дополнительной массой (98 мг) (robot+m);
- робот с тормозными закрылками (98 мг) (robot+d);
- робот с добавленной массой плюс тормозные закрылки (110 мг) (robot+m+d).
Видео №2
Модификация «robot+m+d» во время прыжка показала значительно меньшую среднюю скорость вращения, максимальную высоту и наименьшее общее количество оборотов (4, 0.35 и 11 раз соответственно) по сравнению с роботом без дополнений (7D–7G).
Робот без модификаций и робот с дополнительной массой неконтролируемо вращались на траектории полета, даже при спуске и приземлении. А вот робот тормозными закрылками и робот с закрылками и дополнительной массой спускались плавно, а их брюшная сторона была направлена вниз. Робот robot+m+d приземлялся на брюшную часть в 75% случаев (вставка на 7G).
Видео №3
Таким образом, аэродинамический крутящий момент и дополнительная масса эффективно уменьшали вращение и облегчали контролируемое приземление небольших роботов, что позволяет им совершать многократные прыжки без дополнительной стратегии восстановления.
Изображение №8
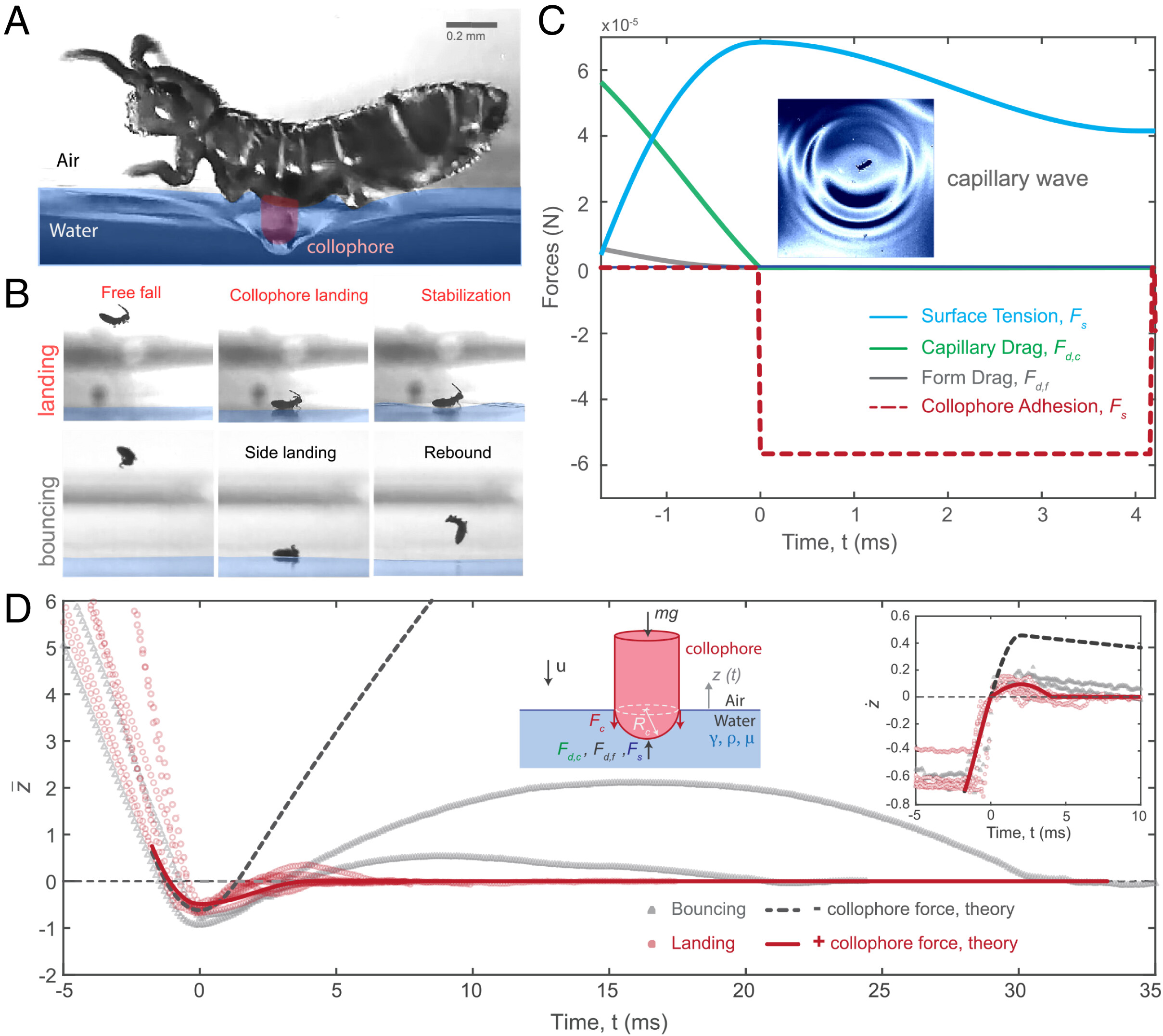
В ходе наблюдений также было установлено, что коллофор также играет важную роль в демпфировании приземления на поверхность воды. Было установлено, что особи приближаются к поверхности воды брюшной частью, направленной вниз, которая впоследствии прикрепляется коллофором к поверхности воды. Это действие эффективно поглощает импульс во время удара, создавая капиллярные волны (видео №2).
Для подтверждения роли капиллярной адгезии коллофора (за счет прикрепленной капли воды) ученые удалили воду из коллофора у нескольких особей и позволили им приземлиться на сухой твердый субстрат. Несмотря на приземление вентрально на сухой коллофор, они несколько раз подпрыгивали из-за неспособности коллофора стабилизировать их приземление. Особям, приземлившимся на спину на поверхность воды, потребовалось примерно в 10 раз больше времени, чтобы скорректировать свое положение и закрепиться на поверхности, чем тем, которые приземлились сначала вентрально (44 мс против 4 мс).
В заключение своего исследования ученые решили установить, как ногохвостики приземляются на поверхность воды и сводят к минимуму нежелательные подпрыгивания и неконтролируемые кувырки. Для этого был проведен анализ динамики приземления насекомых и сравнение их с гидродинамической моделью пониженного порядка.
Коллемболы приземляются на поверхность воды со скоростью удара ui = 0.54 ± 0.12 м/с, достигая максимальной глубины zmax ∼ 0.2 мм (или ∼60% ширины тела Ds) под поверхностью воды за период от 3 до 5 мс. Как обсуждалось ранее, результат приземления сильно зависит от морфологии тела непосредственно перед ударом.
Когда ногохвостики приземляются на брюшную сторону, их открытый коллофор из-за их U-образной морфологии первым взаимодействует с поверхностью воды (8A). В этом случае ногохвостки быстро стабилизируются на поверхности воды и остаются прикрепленными к ней (8B). Напротив, когда насекомые приземляются на боковую или спинную сторону, они отскакивают от поверхности воды.
Для более точного описания этого процесса было проведено математическое моделирование динамики коллофора на интерфейсе вода-воздух. Геометрия коллофора аппроксимируется цилиндром с полусферическим концом, имеющим радиус Rc (диаметр Dc) (8D). Предположим, что движение происходит в основном в одномерном вертикальном измерении, где z(t) обозначает смещение центра полусферы коллофора относительно невозмущенной поверхности воды. Во время удара гидродинамические силы индуцируются сопротивлением формы, плавучестью, добавленной массой, поверхностным натяжением и рассеянием через капиллярные волны.
Измерение нормализованого смещения дало ¯z = (z(t) − zt→∞)/Ds, где zt→∞ — конечное положение равновесия насекомого. Учитывая кинематику и физические параметры ногохвостиков до удара, было определено, что взаимодействие между капиллярными и инерционными силами определяет динамику приземления, в то время как силы плавучести и вязкости незначительны.
Ученые предположили, что силы инерции преобразуются в деформацию поверхности и диссипируют в виде капиллярных волн. Для оценки влияния гидрофильного коллофора на динамику приземления была включена сила капиллярного сцепления Fc = πDcγH(˙z), где H(˙z) — функция Хевисайда, которая тормозит движение насекомого только тогда, когда оно движется вверх (т. е. когда z положительно). Моделирование показало, что насекомое отскакивало бы вверх без этой дополнительной силы, что соответствует экспериментальным данным. Однако модель завышала скорость отскока и траекторию, что может быть связано с геометрией особей во время удара, а также с другими кинематическими параметрами, такими как движение в направлении x и вращение тела. В качестве альтернативы, добавление силы капиллярного сцепления Fc быстро останавливает движение ногохвостика, заставляя его достигать своего равновесного положения примерно за 6 мс. Стоит отметить, что максимальная капиллярная сила, рассчитанная по модели, составляет 28 мкН, что очень близко к максимальным значениям, рассчитанным из экспериментов (∼20 мкН).
Далее был построен временной ряд сил во время удара (8C). Как и ожидалось, доминирующей была сила поверхностного натяжения, которая показывает увеличение до максимума 38 мкН по мере того, как ногохвостик деформирует поверхность воды. Параллельно капиллярное сопротивление Fd, c уменьшалось с максимального значения в 36 мкН до нуля, когда система меняет направление и начинает вибрировать в ответ.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые уделили внимание необычному поведению маленьких, но очень прытких, существ, а именно ногохвостиков. Эти насекомые способны подпрыгивать вверх, корректируя свое положение в воздухе для успешного приземления на лапки. И такое поведение распространено не только среди сухопутных видов, но и среди тех, кто обитает на поверхности воды. Именно эти водные виды и были объектом изучения.
Ранее считалось, что прыжок и приземление ногохвостиков являются полностью неконтролируемыми процессами, однако по результатам экспериментов и моделирования становится очевидно, что это не так. Во время подпрыгивания насекомые меняют форму своего тела, при этом захватывая с собой в полет капельку воды. Комбинация этих маневров позволяет им в последствии приземлиться на брюшко, обезопасив себя от нежелательных отскоков от поверхности воды.
Такая тактика крайне полезна для ногохвостиков, поскольку позволяет им быстро избежать столь нежелательного контакта с хищниками. Для людей же полученная в ходе исследования информация будет весьма полезна в робототехнике. И как показал простой робот, созданный для практических испытаний, реализовать подобные динамические системы не будет столь сложно. В результате можно получить робота, который не только будет обладать более широким спектром маневров, но и сможет восстанавливать положение своего тела без чьей-либо помощи.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


