Мы привыкли к тому, что космические корабли рутинно летают к орбитальным станциям, сближаются и стыкуются. Но даже симулятор уровня Kerbal Space Program показывает, насколько это нетривиальная задача — то по расстоянию промахнулись, то скорость не та, то в тень вошли, то слишком много топлива потратили. А ведь в реальной космонавтике были истории, когда после отказа техники сближались вручную, причем, используя инструменты, которые, казалось, давно остались в прошлом. Сегодня мы поговорим о рандеву разнообразных космических аппаратов, от «Джемини» и первых «Союзов» до летающих сейчас к МКС Crew Dragon, Boeing Starliner и «Союзов», научившихся сверхкороткой схеме сближения.

Астронавт Александр Герст проводит эксперименты по навигации в космосе с секстантом, фото NASA
Основы
Для того, чтобы был понятны смысл выполняемых маневров и изображенные на графиках траектории, нужно коротко объяснить основы орбитального сближения и стыковки. Для простоты в примерах ниже орбиты круговые.
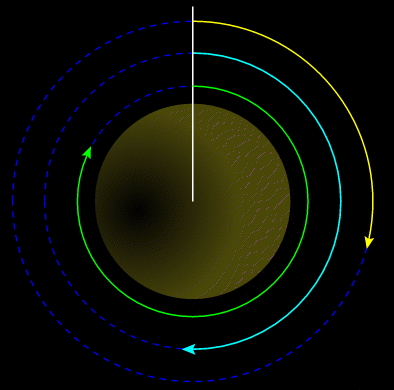
Прежде всего, чем ниже орбита космического аппарата, тем быстрее он пролетает виток. Причем аналогия с машинами, двигающимися по кольцевым московским улицам, Садовому кольцу, МКАД и ТТК будет некорректна, аппарат на низкой орбите не только пролетает меньшее расстояние за виток, но и движется быстрее. Физически правильная аналогия — шарики, катающиеся по натянутой ткани с грузиком-планетой. Главное следствие из этого для задач сближения и стыковки очень простое — чтобы догонять цель на орбите надо быть ниже, чтобы отставать — выше.
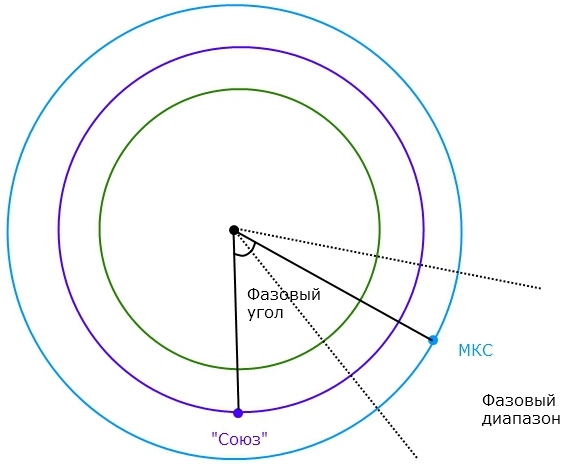
Несколько важных терминов связано с понятием «фазовый». Фазовый угол — угол между направлениями на два аппарата из центра, вокруг которого они вращаются, например, орбитальной станцией и кораблем, который к ней летит. Фазовый диапазон — допустимые значения фазовых углов. Орбита фазирования — на ней получают нужные значения фазового угла.
Общий принцип сближения для последующей стыковки прост — активный корабль стартует в нужный момент, чтобы по окончании выведения оказаться в плоскости орбиты цели и получить требуемое значение фазового угла. Затем догоняет цель по более низкой орбите фазирования и в нужный момент дает импульс, который приведет его близко к цели. Затем уже у цели выдается импульс, который уменьшает относительную скорость, и можно переходить к финальному сближению и стыковке. Но самое интересное скрывается в деталях — разные страны и поколения космических баллистиков создали очень разные реализации этого вроде бы простого алгоритма.
«Джемини» и секстант
«В надежде, что эта работа может помочь им в освоении космоса, она посвящается настоящим и будущим экипажам космических кораблей моей страны. О если бы я мог присоединиться к ним в их захватывающих начинаниях!»
Такое посвящение написал Базз Олдрин к своей диссертации «Визуальные техники наведения для ручного сближения». На момент защиты он провалил отбор во второй отряд астронавтов и еще не знал, что попадет в третий отряд и в итоге станет вторым человеком на Луне. Еще один малоизвестный факт — именно предложенный Олдрином подход в итоге и использовали на «Джемини».
Какие варианты сближения успели придумать до начала полетов?
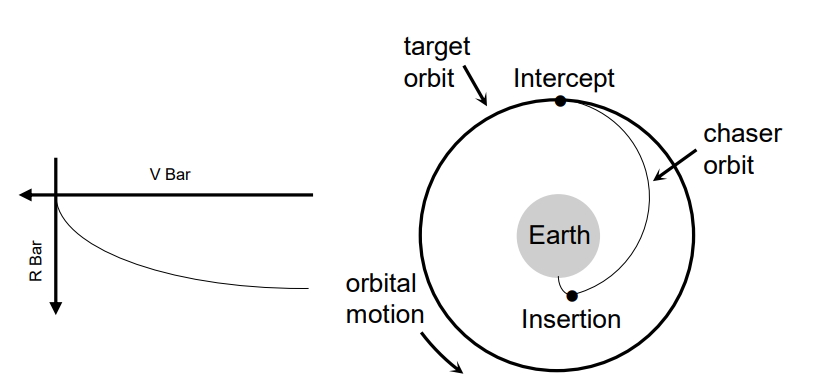
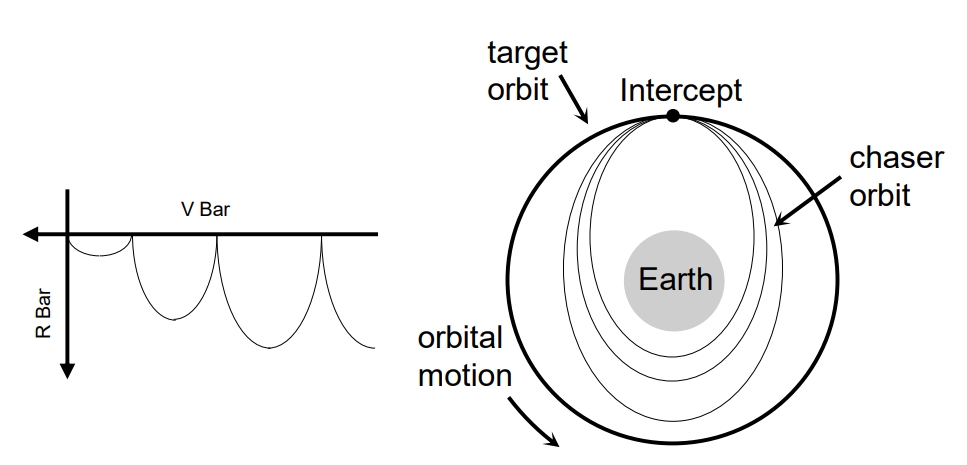
Слева относительное движение, мишень в центре, тонкая линия — траектория активного корабля. Справа — то же самое, но в абсолютных координатах
Вариант для идеального мира — сразу на выведении ракета отправляет на траекторию перехвата цели. В реальной жизни любая задержка, авария, неточность приведет к траектории, которая пройдет мимо цели, и ни времени ни возможности исправить ситуацию уже не будет.
А этот вариант знаком всем, кто пытался сближаться и стыковаться в KSP, Orbiter или других симуляторах. Активный корабль выходит на орбиту фазирования, которая в одной точке касается орбиты цели. Затем, управляя высотой перицентра (нижней точки) эллиптической орбиты, задается период обращения, чтобы после очередного витка оказаться очень близко к цели. Концепция проста, но имеет свои недостатки — небольшая ошибка в финальном маневре может привести к промаху или неудобному ракурсу сближения. Такую ошибку будет сложно заметить и еще сложнее исправить, а, когда встреча через виток, ~90 минут, даже очень маленькая ошибка может в итоге стать заметной.

Олдрин в своей диссертации предложил то, что назвал орбитой ожидания, а сейчас это называют коэллиптической орбитой. Активный корабль после выведения и предварительного фазирования выходит на орбиту, которая имеет постоянную разницу высоты с целью. Ее плюс — в относительных координатах она выглядит как прямая линия, и расстояние до цели уменьшается с примерно постоянной скоростью. В определенных пределах длительностью нахождения на коэллиптической орбите можно управлять, чтобы сближаться в удобных условиях освещения. Для «Джемини» в итоге выбрали орбиту, которая на 28 км (15 миль) ниже.

Затем, когда высота цели над местным горизонтом составит 27,2°, производится маневр перехода на траекторию сближения. Важно — он выполняется по вектору, направленному на цель (развернув корабль носом на нее). Это не Гоманов переход, не самый экономный маневр, но он имеет множество плюсов. За время сближения есть две точки, когда можно обнаружить и исправить возможные ошибки. Корабль подходит к цели снизу, и она хорошо видна на фоне неба. И, главное, маневр выполняется в зоне видимости цели и может быть выполнен вручную с использованием резервных инструментов. Как это выглядит в динамике, можно посмотреть в симуляторе Orbiter.
Первая, упрощенная, попытка сближения, была предпринята уже на «Джемини-4» — астронавты должны были подойти к верхней ступени ракеты-носителя «Титан-2», которая вывела корабль на орбиту, и после отделения находилась совсем рядом. Однако из-за недостаточной тренировки этого сделать не получилось. Главной задачей «Джемини-4» был первый американский выход в открытый космос, который прошел в целом успешно. На «Джемини-5» попытку сближения с мишенью, которую везли с собой прикрепленной к кораблю, отменили из-за аварии в системе электропитания корабля. Из-за аварии при выведении мишени Agena Target Vehicle для «Джемини-6А» в качестве цели выбрали уже находящийся в космосе «Джемини-7». Получилось — за три витка активный корабль благополучно сблизился с целью и заснял шикарные кадры.
На «Джемини-8» удалось совершить первую в истории стыковку, но из-за случившейся сразу после аварии каких-то дополнительных экспериментов не проводили. А вот на “Джемини-9А” состыковаться не получилось из-за того, что на мишени не отделился головной обтекатель. Тем не менее, астронавты благополучно провели эксперименты с «футбольной» равнопериодической орбитой, а также ушли по орбите вперед и выполнили маневр сближения с противоположной стороны, сверху и спереди. Тогда же впервые использовали секстант для определения углового положения мишени.
«Футбольная» орбита слева
На «Джемини-11» успешно провели сближение за один виток и проверили «стабильную» орбиту. После отделения корабля от второй ступени выполнили первую коррекцию, на 23 минуте совместили орбитальные плоскости, на 35 минуте мишень увидел радар и на 50 минуте выполнили переход на траекторию сближения. Спустя 88 минут после старта корабль был уже около мишени «Аджена». Стабильной назвали орбиту, когда корабль летит по той же орбите за мишенью. В этом случае можно долго находиться на фиксированном расстоянии до цели и выполнить маневр сближения, когда это наиболее удобно.
Сближение за один виток (слева) и переход к цели из неподвижного висения на стабильной орбите
Но самая яркая история случилась на «Джемини-12», где, вот совпадение, летел Базз Олдрин. Бортовой радиолокатор корабля благополучно захватил мишень «Аджена» на расстоянии 436 км, но перестал ее видеть на 119 км. Баззу пришлось вспомнить свою диссертацию, достать хранящийся на всякий случай секстант и сближаться вручную. Получилось!

Базз Олдрин (слева) с секстантом в руках и командир корабля Джим Лоувелл
На плечах гигантов
Вопрос «Как же лунные модули «Аполлонов» могли, стартовав с Луны, найти командный модуль на орбите?» имеет очень простой ответ — так же, как это уже было отработано на «Джемини». На 11 и 12 «Аполлонах» лунный модуль стартовал в нужный момент времени, выходил на круговую орбиту позади командного модуля, выполнял маневр коррекции плоскости орбиты и переходил на уже знакомую вам коэллиптическую орбиту на те же 28 км (15 миль) ниже командного модуля. Затем, когда высота командного модуля составляла 26,6°, выполнялся переход на траекторию сближения.
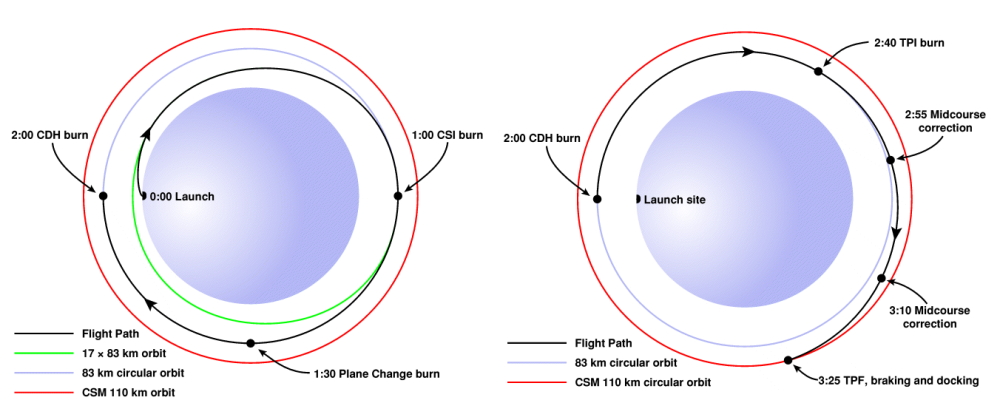
Полет в абсолютных координатах. 0:00 — старт и выход на орбиту 17х83 км, 1:00 — маневр перехода на круговую орбиту высотой 83 км, 1:30 — совмещение орбитальных плоскостей, 2:00 — переход на коэллиптическую орбиту, 2:40 — переход на траекторию сближения, 2:55 и 3:10 — коррекции, 3:25 — торможение и стыковка. Источник
На «Аполлонах» 14-17 использовали быструю схему, которую проверили на «Джемини-11», и выходили сразу на траекторию, финальная точка которой совпадала с началом сближения.

Наглядное сравнение обычной (светло-серый) и быстрой схемы в относительных координатах
И, в общем, с этими траекториями особых проблем не было. Неприятность случилась там, где не ждали. На «Аполлоне-16» командный модуль должен был выйти на орбиту 15х110 км, отделить лунный модуль и перейти на круговую орбиту встречи высотой 110 км. Однако последний пункт выполнить не получилось из-за внезапной проблемы с приводом, поворачивающим маршевый двигатель служебного модуля. Принятое за неделю до этого правило безопасности говорило, что отказ любого из четырех приводов маршевого двигателя запрещает скругление орбиты и высадку на поверхность, лунный модуль должен подойти к командному, состыковаться, и астронавты, несолоно хлебавши, должны отправиться на Землю. На то, чтобы разобраться в ситуации, было примерно 10 часов, затем плоскость орбиты модулей оказывалась слишком далеко от района посадки. ЦУП принял решение, чтобы лунный модуль (ЛМ) подошел к командному (КМ). И тут начались неприятности — при выполнении маневра сближения пилот КМ Томас Маттингли заметил, что он тормозит, а расстояние до ЛМ не начинает уменьшаться. Подумав, он включил двигатели ориентации еще раз и убрал выданное изменение скорости — когда у тебя перицентр 15 км уменьшать его, тормозя, опасно. Так что когда модули вышли из тени Луны, ЦУП осознал наличие еще одной проблемы — относительное движение модулей определено неверно, и КМ не находится на «футбольной» орбите, которая сама через виток должна доставить КМ близко к ЛМ. По бортовым данным КМ перицентр орбиты составлял 11,6 км, а по данным ЦУПа — 16,6 км. Когда оба модуля подошли к району перицентра, астронавты при помощи ЦУПа начали выполнять сближение методом грубой силы — направив КМ в сторону ЛМ и вручную убирая постоянно возникающие боковые скорости. История закончилась хорошо — модули сблизились благополучно, на 16 витке ЦУП разрешил спуск на поверхность. Посадка, взлет, встреча на орбите и полет домой прошли без серьезных происшествий.
По эту сторону океана
В СССР связанный со сближением пиар и троллинг устроили еще в 1962 году. Корабль «Восток-4» был запущен ровно сутки спустя после старта «Востока-3» и был выведен на близкую орбиту. Космонавты Андриян Николаев и Павел Попович видели корабли друг друга и вели прямую связь. Но на «Востоках» не было двигателей для маневрирования, поэтому неизбежная небольшая разница орбит постепенно увеличивала расстояние.
Первым советским кораблем, который мог маневрировать на орбите, стал «Союз». Но подход советских инженеров очень сильно отличался от американского. Расчеты для рандеву выполнялись на Земле, корабли выполняли маневры, чтобы оказаться на расстоянии менее 30 км друг от друга, а дальше в дело вступала автоматика. При помощи обзорных антенн активный и пассивный корабли определяли положение относительно друг друга и оба разворачивались стыковочными узлами один к другому. Затем, определяя относительную скорость при помощи радиосигналов, активный аппарат подходил методом «грубой силы» — разгонялся в направлении пассивного, разворачивался, гася боковые скорости (при этом его гиростабилизированная антенна сопровождала пассивный корабль), тормозил и в финале подходил к стыковочному узлу.

Антенны системы “Игла” и принцип работы, источник
На первых полетах расстояние для срабатывания «Иглы» обеспечивалось выведением без предварительного сближения — после отделения от последней ступени ракеты-носителя корабль оказывался сразу в районе цели. Реализуемость идеи продемонстрировали беспилотные «Союзы», обозначенные как «Космос-186» и «Космос-188», совершившие 30 октября 1967 первую в истории автоматическую стыковку.
Похожий подход попытались выполнить на «Союзе-3», но там из-за сочетания недостатков планирования, подготовки и ошибок космонавта получилось автоматическое дальнее сближение, но не удалось вручную подойти к пассивному кораблю и состыковаться. На «Союзах» 4 и 5 уже стыковались через сутки, для чего корректировали орбиту по передаваемым из ЦУПа уставкам.
Любопытная деталь — автономность сближения и невозможность быстро расшифровать телеметрию приводила к тому, что в ЦУПе знали только общую логику сближения и первые годы хватались за сердце, когда корабль, по ощущениям, слишком долго выполнял маневр или сближался без торможения.
Принятый в СССР подход имел серьезный недостаток — баллистики могли вывести корабль к цели до расстояния в несколько километров, а космонавты — состыковаться вручную с расстояния примерно сто метров. Но в случае отказа радиотехнической системы не было запасного ручного способа подойти от нескольких километров до сотни метров. По этой причине сорвались стыковки «Союзов» 7 и 8, «Союза-15» к станции «Салют-3», «Союза-23» к станции «Салют-5» и даже в 83 году, когда «Союз Т-8» не смог пристыковаться к станции «Салют-7». «Союз Т-8» стал последней каплей, после которой решили начать разрабатывать алгоритмы ручного дальнего сближения. Наработки очень пригодились в 1985 году, когда оказалась полностью обесточена станция «Салют-7» и к ней отправился корабль «Союз Т-13». Баллистики смогли подвести корабль на 5 км к станции, после чего космонавты Джанибеков и Савиных сближались вручную, используя лазерный дальномер, калькулятор и графические шаблоны с предварительно рассчитанными диапазонами расстояний и скоростей. Затем эти же наработки пригодились на уникальном полете «Союз Т-15», где перелетали от станции «Мир» к «Салюту-7» и обратно. На «Салюте-7» к тому времени сломалась «Игла» на свободном стыковочном порту, так что пришлось использовать дальномер.
Новые ограничения новой техники
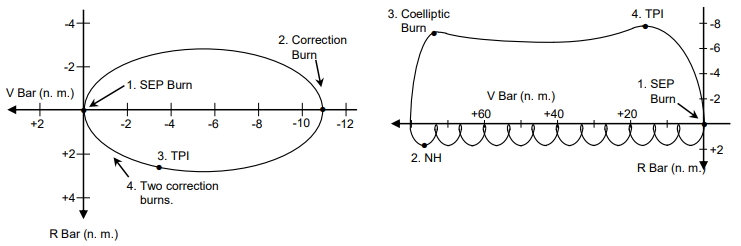
Когда Space Shuttle еще только создавался, было ясно, что ему придется стыковаться со спутниками для обслуживания их на орбите, а в будущем и с орбитальными станциями. Так что уже в 70-х вовсю велись дискуссии о лучшем способе сближения. Принятый в 1973 году профиль из двух коэллиптических орбит быстро стал терять привлекательность из-за своей негибкости.
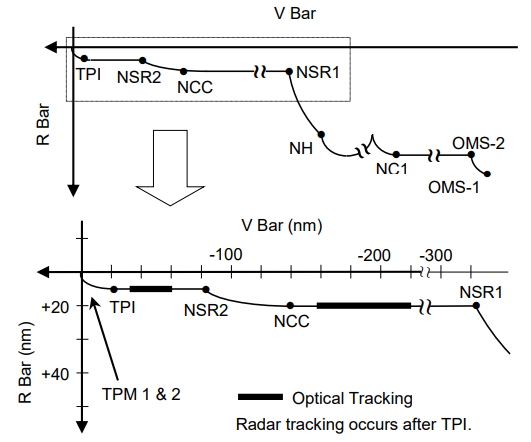
Изначально предложенный вариант сближения с двумя коэллиптическими орбитами
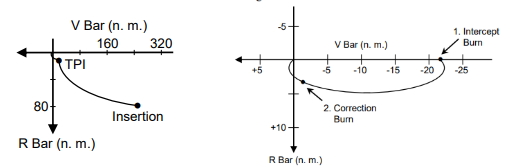
Еще одной потенциальной проблемой стали опасения, что при финальном торможении у цели шаттл останется без запасов топлива в носовых двигателях ориентации — переход с коэллиптической орбиты приводил к довольно высокой относительной скорости у цели. Какое-то время рассматривался модифицированный вариант с коэллиптической орбитой не на 18 км ниже, а всего на 4,6, но у него проявились свои недостатки. В итоге был принят вариант со стабильной орбитой, проверенной на «Джемини-11». Вне зависимости от того, с какой стороны подходил шаттл, он прицеливался в точку в 15 км позади цели на той же высоте. В теории можно было бы, выполнив маневр, перейти на ту же орбиту, что и цель, и находиться на ней сколько угодно долго, сохраняя постоянное расстояние 15 км за целью, но была принята другая концепция — если все было в порядке, шаттл выполнял маневр Ti для перехода к цели, либо, если были какие-то проблемы, переходил на равнопериодическую «футбольную» орбиту и описывал эллипсы в стороне от цели.
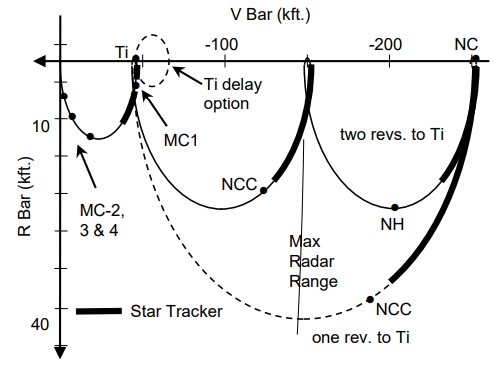
Варианты со сближением за 2 или 3 витка
Другие ограничения могли быть связаны с выхлопом маневровых двигателей шаттла, который не должен был попадать на цель. По этой причине основными стали два варианта финального сближения — по вертикальной или горизонтальной осям. В этом случае, благодаря орбитальной механике, импульсы двигателями надо было делать вбок.
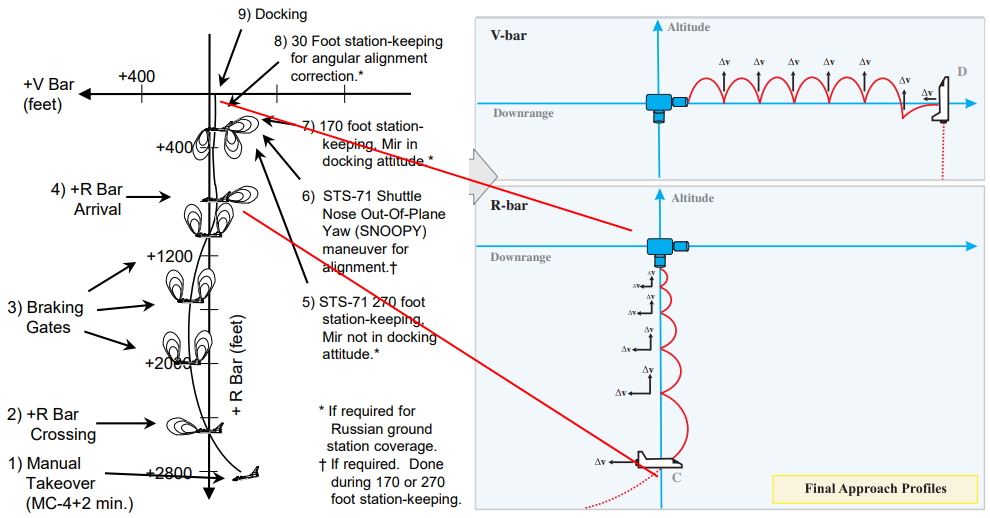
В 1997 году приняли модифицированный вариант стабильной орбиты, еще более удобный и позволяющий экономить еще больше топлива, а после катастрофы «Колумбии» добавили маневр кувырка на финальном сближении.
Знакомые траектории новых кораблей
Теперь вы уже умеете читать траектории кораблей, и для вас совершенно ясно, как, например, сближается Crew Dragon с МКС.
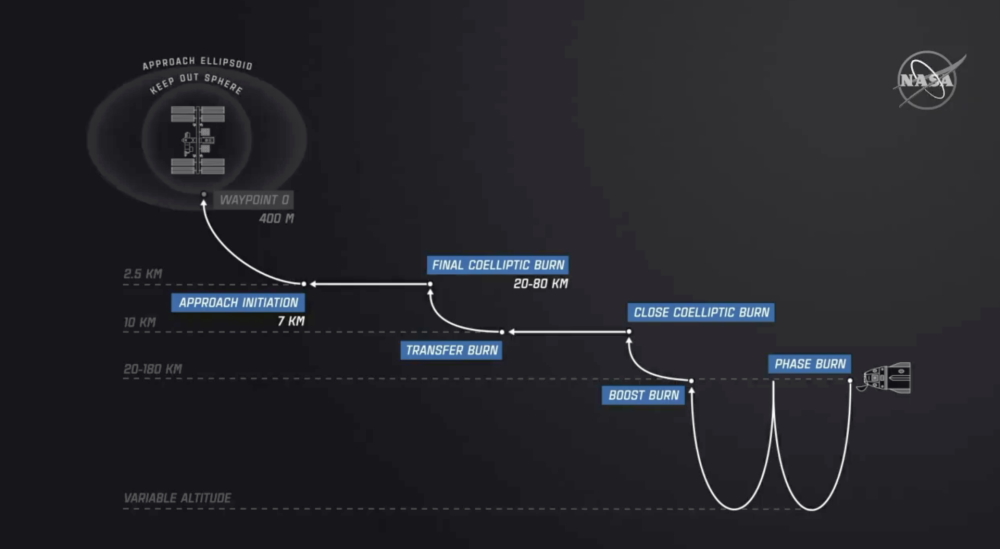
На схеме отлично видны и даже подписаны две коэллиптические орбиты, значит Crew Dragon сближается по модифицированной траектории, которая когда-то предлагалась для шаттлов. Разница высоты второй коэллиптической орбиты составляет всего 2,5 км, это гарантирует низкие относительные скорости.
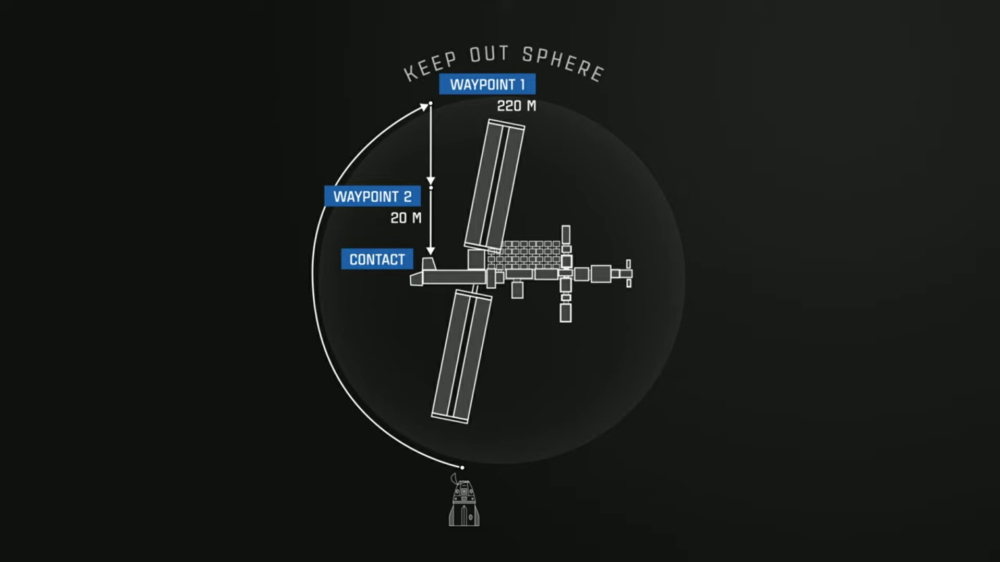
Траектория финального сближения связана с виртуальной сферой, которая окружает МКС, и в нее можно заходить только для непосредственно стыковки. Поэтому, когда точка прицеливания лежит ниже станции, а стыковаться нужно, как, например, в случае Crew 4, к зенитному (верхнему) узлу модуля Harmony, то запретную зону придется облетать.
У Boeing Starliner очень похожая траектория, но переход на вторую коэллиптическую орбиту производится с проходом под станцией и уходом назад, а разница высот второй коэллиптической орбиты составляет 5 км.
Быстрее и быстрее
В СССР новая система «Курс» на смену «Игле» появилась в 1986 году. Она уже позволяла более продвинутые траектории сближения и не требовала разворота станции навстречу кораблю. Скорее всего, вы слышали про мем “In Soviet Russia все наоборот”. Забавно, но он работает в орбитальном сближении — на «Союзах» коэллиптическая орбита используется перед орбитами фазирования, а не после, как на Западе. А финальный переход немного похож на идею из диссертации Олдрина — когда высота станции над горизонтом составляет 23°, корабль выполняет маневр перехода на траекторию финального сближения. Но он выполняется в направлении не на станцию, а по вектору орбитальной скорости, т.е. это более экономный Гоманов переход и встреча состоится через пол-витка.
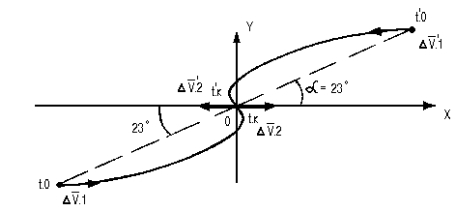
Траектория перехода в относительных координатах, t’0 — симметричная траектория, для сближения сверху и спереди, источник
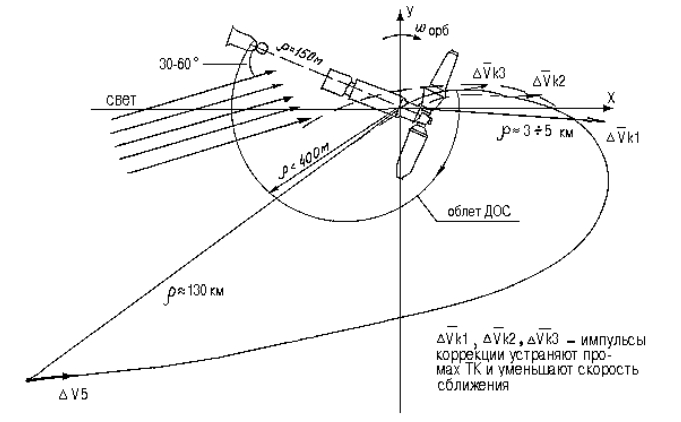
Во время финального сближения «Курс» позволяет в автоматическом режиме производить сложные облеты станции от точки прицеливания к оси стыковочного узла.
В том же 1986 году была выведена станция «Мир» и для нее перевели «Союзы» от суточной схемы к двухсуточной. Во времена «Салютов» стыковка через сутки диктовалась удобством зон связи. Станция «Мир» должна была расширяться новыми модулями, и маневрировать ей для формирования нужного фазового угла становилось бы все более накладно. А двухсуточная схема имела очень большой диапазон возможных фазовых углов, целых 150°. Однако она была дискомфортна для людей. Прошли годы. Космонавты терпеть приучены, а вот начавшим летать к МКС космическим туристам было плохо. Для того, чтобы сделать полет к МКС комфортнее российские баллистики задумались о более коротких схемах. В 2012 четырехвитковую шестичасовую схему отработали на грузовых «Прогрессах», а с 2013 года стали применять на пилотируемых кораблях.
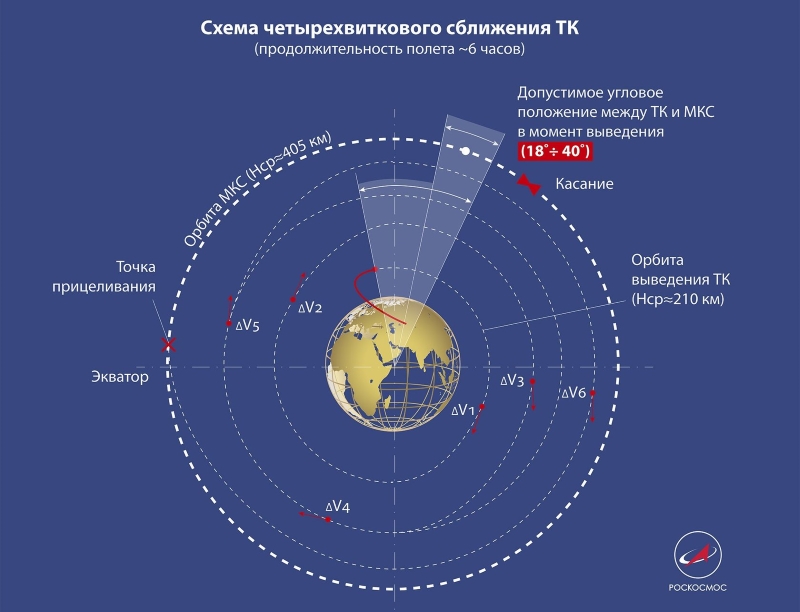

Еще один вариант представления орбит, по высоте над поверхностью со временем. Полет «Союз МС-11». Участок 1 очень похож на коэллиптическую орбиту, 2 — орбита фазирования, 3 — биэллиптический переход к станции за три импульса, высота 23° в районе dV6. Источник
Но четыре витка не предел. После тестов на грузовиках с 2018 года, корабль «Союз МС-17» долетел до МКС за два витка или три часа.
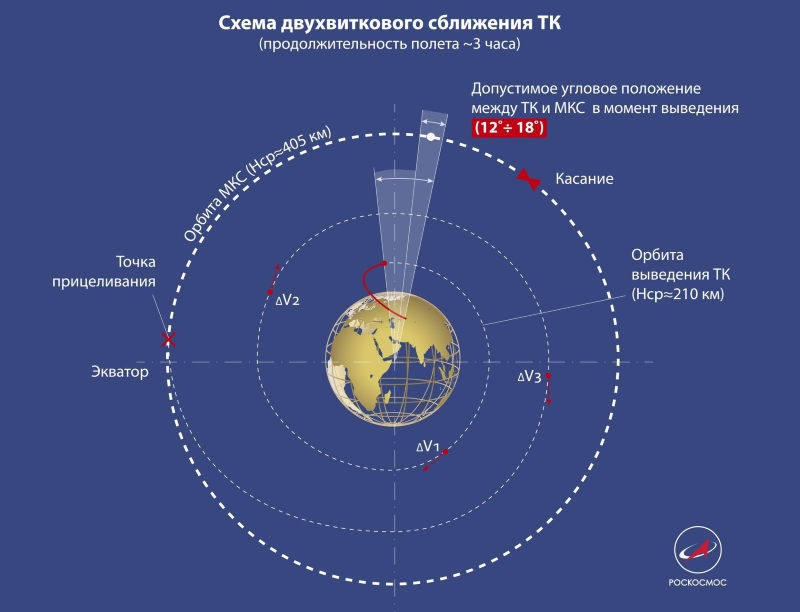
Обратите внимание, насколько стал меньше допустимый диапазон фазовых углов
Но и это еще не все. Сейчас ведется подготовка к одновитковой схеме. После выведения корабль перейдет на коэллиптическую орбиту и, когда высота станции над горизонтом составит 23°, выполнит маневр перехода на траекторию к МКС. Здесь будет еще сложнее, фазовый диапазон составит всего-то 1°. Но у баллистиков есть хак — можно выйти на совсем немного отличающуюся плоскость орбиты, и за счет этих маневров расширить допустимый фазовый диапазон.
Развитие баллистики не остановилось, наоборот — сейчас аппараты летают по все более сложным орбитам. И уже в этом десятилетии нас должно ждать увлекательное зрелище — смотреть, по какой траектории посадочный модуль HLS на базе Starship будет сближаться со станцией Gateway на почти прямолинейной гало-орбите Луны.