
Господа! У меня уже две различные организации спрашивали совета про оборудование лаборатории роботики. Причем не для младших детей, а для старших школьников + младших студентов, с возможностью расширения до старших студентов и исследовательских проектов. То есть ожидается, что в лаборатории будут использоваться профессиональные средства разработки, а не упрощенные, наподобие Лего и недостаточно гибкого Ардуино. Кроме этого, ожидается, что роботы будут делать что-нибудь умное, с распознаванием образов и ситуаций, чтобы можно было бы назвать «лаборатория робототехники и интеллектуальных систем».
По этому поводу я хочу устроить обсуждение:
1. Ниже я перечислю несколько платформ, которые я собираюсь привезти в августе в Казахстан и в октябре-ноябре в Россию и Украину. Я знаю, что на большинстве из этих платформ кто-нибудь да построил робота. Но каких из этих платформ подходят для роботики с вашей точки зрения?
2. У меня не очень много опыта с моторчиками и другими активаторами. Где и что бы вы купили для преподавания робототехники (как специализации программирования встроенных систем)?
Восемь платформ у меня на руках:
1. Onion Omega на основе ядра MIPS 24K, которое балансирует приемлемую производительность при низком энергопотреблении, и при этом на нем может работать Linux (в MIPS 24K 8 стадий in-order, конвейера, есть TLB MMU, кэши, предсказатель переходов):

2. VoCore — еще более миниатюрный линуксный компьютер с WiFi на MIPS 24K:


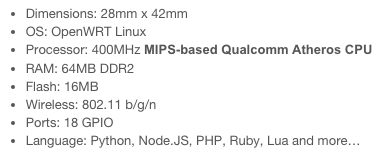
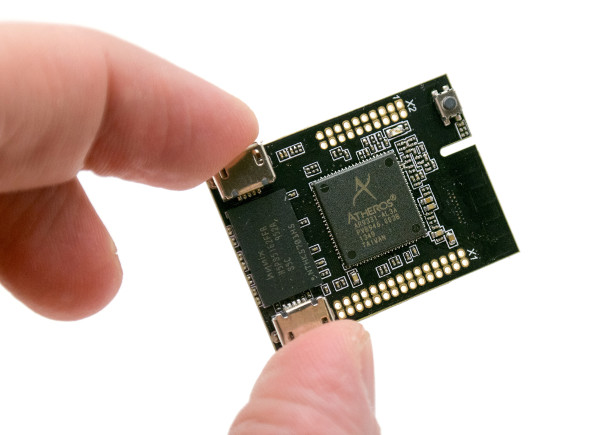
3. Unwired One — спроектированный в России линуксный компьютер на MIPS 24K
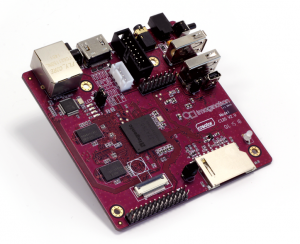
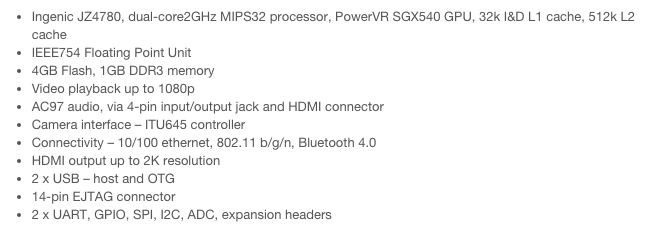
4. MIPS Creator ci20 — более высокопроизводительный (но и более энергопотребляющий) компьютер с MIPS32 Ingenic CPU и PowerVR GPU:
5. Digilent chipKIT Wi-FIRE, микроконтроллерная плата с Microchip PIC32MZ EF на основе ядра MIPS M5150. В том же классе, что и ARM Cortex M4, но мощнее — с кэшами, TLB MMU, FPU и виртуализацией для секьюрити:


6. Olimex PIC32-EMZ64, более дешевая плата с Microchip PIC32MZ EF. Без WiFi, но зато с экранчиком и звуковым выходом:

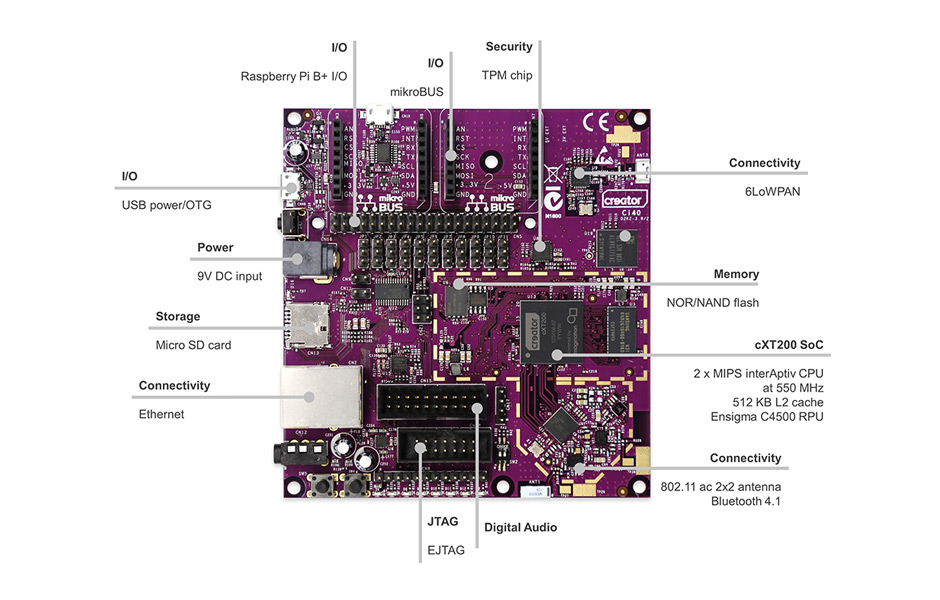
7. Новинка сезона — встроенный компьютер MIPS Creator ci40 с ядром MIPS interAptiv c хардверной поддержкой многопоточности на каждом из ядер. Хотя процессорных ядер два, но многоядерный Линукс воспринимает их как четыре, так как каждое из двух ядер внутри обрабатывает два потока команд — hardware-supported multithreading. Пока один tread ждет во время промаха кэша, другой может работать — этим достигается бОльшая загрузка процессора. В конечном итоге, такая структура приводит к экономии энергопотребления по сравнению с системами с бОльшим количеством однопоточных ядер:
Также замечу что недавно построили робота на российском микропроцессоре Baikal-T с мощным двухядерным out-of-order кластером процессорных ядер MIPS P5600, и плата с этим процессором есть у меня на руках, но эта плата пока недостаточно массовая, чтобы использовать ее в качестве роботехнической платформы в большом количестве вузов:


