
Если Вы внезапно для себя решили, что небольшая электроотвертка на подобии Xiaomi Wowstick просто жизненно необходима, но готовое решение это не про вас, тогда эта статья должна вас заинтересовать. Под катом вас ожидают подробности разработки и инструкции для изготовления собственного «велосипеда». Итак, прошу, господа …
История создания данного устройства началась совершенного не с того, что мне понадобилось или захотелось иметь данную отвертку у себя в наборе инструментов. Да и процесс разборки или сборки устройств ручной отверткой меня вполне устраивал, но визит моего коллеги на предприятии немного это изменил.
Одним осенним днем к нам в лабораторию автоматизации заглянул электрик одного из цехов, Виктор, с простым вопросом помочь собрать ему схему реверсирования коллекторного двигателя на малогабаритных реле. Мой коллега, Антон, взялся за дело, но после изготовления, оказалось, что результирующее устройство превосходило по габаритам сам двигатель и аккумулятор вместе взятые, ко всему же реле были на 5 Вольт и при подсевшем аккумуляторе начинали плохо срабатывать. В итоге Виктор обратился ко мне с вопросом нельзя ли как то уменьшить схему и избавиться от реле в пользу полупроводников. Мне стало интересно, что же за итоговое изделие он городит, в результате оказалось, что это должна быть маленькая электроотвертка на основе двигателя, купленного в Китае. Идея мне понравилась, но я засомневался в возможностях мотора и попросил Виктора принести показать его, как говориться в «живую». Увиденному результату я был немного удивлен. Для своих габаритов мотор оказался вполне неплох, с учетом металлического редуктора и приличного момента, как минимум пальцами его удержать было не реально.
Через несколько дней раздумий, я все же решил что данное устройство пригодиться и мне, тем более цена на него выходит вполне разумная, а опыт процесса разработки просто бесценен. В итоге я сказал Виктору, что помогу ему сделать устройство с гораздо более лучшими характеристиками, чем те, которые он для себя определил. Обсудив с ним основные критерии будущего устройства, я в тот же день приступил к процессу разработки. Общую концепцию устройства я представил, но было интересно что уже придумали до меня. Просмотрев готовые решения от производителей на рынке и почитав на них обзоры, набросал основные критерии и характеристики. Что же из этого вышло, читайте ниже.
Итак, теперь давайте определим, каким же требованиям должна соответствовать наша отвертка, что бы быть на уровне того, что есть на рынке, а может и чуточку лучше.
- габаритные параметры должны соответствовать: ДхШхВ не более 170х24х24 мм.
- возможность изготовления корпуса и его компонентов на 3D принтере.
- питание от аккумулятора типоразмера 18650.
- зарядка от USB или любого зарядного устройства для телефона через разъем micro-USB.
- управление включением/выключением одной кнопкой.
- несколько скоростей вращения.
- авто отключение при простое в течении 5 минут.
- индикация работы и выбранной скорости.
- без муфты ограничения момента
Теперь, когда с требованиями определились, можно и приступить к проектированию. Для начала займемся корпусом.
Немного посмотрел на готовые конструкции я пришел к выводу, что вполне комфортным будет корпус в виде цилиндра с усеченным конусом с одного конца, через который будет выходить приводной вал с битодержателем. Разъем зарядки было решено установить на противоположном торце, это удобно, как при работе с подключенным шнуром зарядного устройства, так и с точки зрения установки готового модуля зарядки внутри. Долго размышлял над расположением органов управления, в результате определился со следующей конфигурацией: кнопка управления питанием расположена сбоку в нескольких сантиметрах от торца с разъемом зарядки. Кнопка будет выполнена из прозрачного пластика SBS или вырезана из толстого акрила, что позволит ее подсветить светодиодом отображающим статус устройства. Кнопки управления направлением вращения сделал ближе к краю с приводным валом, так что бы их было удобно нажимать либо большим пальцем с перемещением его по кнопкам, либо указательным и средним, в зависимости от хвата, кому как удобно. Кнопка переключения режимов (скоростей) будет расположена между кнопками вперед/назад, но на перпендикулярной грани корпуса. Забегая вперед, стоит сказать, что такой угол разноса кнопок оказался не очень удачный, но иное решение усложняло компоновку элементов, а с другой стороны как показала практика, режим не так часто приходиться и менять.
Контейнер для крепления аккумулятора решил сделать частью корпуса, а контакты будут вставляться в специальные окна и будут слегка подпружинены.
Приводной вал от мотор-редуктора я решил соединить с осью битодержателя через латунную муфту с 2-мя гуженами М3, а в дополнении ось будет поддерживаться шариковым подшипником 623zz, это уменьшит нагрузку на редуктор и его крепление.
Скрепить две половинки в единое целое были призваны 6 черных саморезов из набора винтов для ремонта ноутбука.
Я хоть и владею различными CAD система для проектирования, но все же привык некоторые вещи сначала делать на бумаге, вот и в это раз, прежде чем приступить к черчению, эскиз я все же начертил от руки, а далее дело стало за Autodesk Inventor.
Сделав одну половину корпуса, я скачал модели аккумулятора, платы контроллера заряда, мотор редуктора и подшипника создал предварительную сборку в 3D.

На первый взгляд все получилось как задумано. В итоге процесс проектирования у меня занял несколько дней, потому как делал я это в свободное время или в обед, но корпус в был спроектирован, далее следовал долгий процесс печати на моем «чудо» 3D принтере…
Спустя 5 часов печати и двух вечеров, первый экземпляр корпуса все же был изготовлен из черного ABS пластика. Толкатели кнопок я напечатал синим цветом для кнопки переключения скорости, черным для кнопок «вперед/назад», а кнопку включения сделал из 10 мм акрила, надев на нее напечатанное кольцо для удержания в корпусе.

![]()
После ацетоновой бани и небольшой обработки напильником (а куда же без него) все элементы стали на свои места без особых нареканий.

Единственный момент, так это небольшая щель из-за того, что под конец печати первой половины модель подорвало от печатного стола, и она стала немного кривоватой, но, к сожалению, лучше мой принтер не может и я с этим смирился.

К моменту начала проектирования корпуса электронная схема управления была уже спроектирована и опробована на макетной плате.

Структурно я разбил схему на 5 основных узлов – это контроллер заряда аккумулятора, модуль управления питанием, повышающий преобразователь, контроллер и силовой модуль управления двигателем (подробней можно посмотреть на схеме в репозитории, указанном к конце статьи).
Вот видео процесса отладки (прошу прощения за качество, но когда снимал видео, я совсем не предполагал, что буду писать статью на эту тему):
Контроллер заряда со встроенной защитой на основе TP4056 был взят готовый. Это удобное и компактное решение с индикацией процесса заряда.
Управление одной кнопкой было построено на транзисторах на основе одного из Американских патентов, а если быть точным, то честно позаимствованной из статьи на easyelectronics.ru
Эта схема мной была не раз применена, к тому же она у меня собрана отдельно на плате, так что я могу ее подключать к любому проекту на этапе отладки. Помимо кнопки, отключение питания может выполнять и контроллер.
Так как двигатель рассчитан на работу от 6В, а следовательно при этом уровне напряжения питания обеспечивать номинальный момент и скорость на валу, то я решил добавить в схему повышающий преобразователь. Ну а там где необходимо 6В, можно сделать и 8В. Такое решение позволило немного поднять скорость, а соответственно и момент. Также стало возможным регулировать скорость в большем диапазоне с приемлемыми характеристиками вращения. В итоге, над схемой долго не раздумывал, под рукой оказался готовый преобразователь на MT3608. Проведя замеры и испытания, пришел к выводу, что его более чем достаточно для работы устройства. В готовой схеме остались все компоненты, кроме резистивного делителя в обратной связи, его я пересчитал на напряжение 8,5 Вольт. Компоненты преобразователя были размещены на обратной стороне платы управления питанием.
В качестве «мозга» системы был выбран контроллер компании Atmel, ныне Microchip, ATTiny 13A, его ресурсов более чем достаточно для реализации поставленных задач, встроенный АЦП позволил обработать кнопки, а ШИМ контроллер управлять скоростью мотора не занимая ресурсов процессора. К тому же, его можно заменить более мощным AtTiny45 или ему подобным, ведь они pin-to-pin совместимы.
Для коммутации двигателя было рассмотрено несколько вариаций решения от создания H-моста на дискретных элементах до готового решения на базе микросхем. В итоге остановился на готовом в виде микросхемы драйвера коллекторного двигателя. Стал выбор между MX612 и DRV8837. После изучения мануалов драйвер от TI мне понравился больше, но корпус микросхемы не позволял изготавливать плату в домашних условиях без маски, в результате пришлось использовать MX612. Детали были заказаны в поднебесной (печально, но из 6 заказанных рабочими оказались только 3). Как выяснилось позже, можно было взять L9110S, но я видимо слабо занимался поиском…
После окончательной проверки корпуса были разведены платы для контроллера, кнопок и системы управления питанием.

Теперь остается разобраться с механикой. В качестве двигателя был выбран готовый мотор-редуктор со скоростью вращения 400 об/мин. При заказе у китайцев можно попросить продавца и он вам сделает практически любое передаточное число на редукторе. Как выяснилось уже на практике, то лучше поставить двигатель с меньшей скоростью, потому как момент все же маловат. Подшипник был куплен на рынке, а муфта заказана токарю. В качестве битодержателя был взят удлинитель от набора бит 4 мм. Его хвостовик был проточен до 3,05 мм, что бы сел в натяг в подшипник.
Так как не у всех есть возможность заказывать детали токарям, то у меня возникла идея муфту печатать. Т.е. делаем муфту с одной стороны с лыской под выходной вал двигателя, а с другой стороны с шестигранником под битодержатель, при этом меняем подшипник на 624zz и токарь нам не нужен, но это в жизни не проверялось.
Итак, когда все узлы и детали были готовы можно приступать к сборке.
Для начала произведём сборку трёх плат: первая плата — плата повышающего преобразователя и управления питанием. Установим на неё необходимые компоненты, а для преобразователя перенесём дроссель, микросхему ШИМ, диод Шотки и фильтрующие емкости с заводской платы.
Затем собираем платы контроллера и кнопок управления. Не забываем перед сборкой платы контроллера сделать в ней необходимые вырезы. Прошиваем контроллер прошивкой из репозитория.
Теперь необходимо спаять эти платы вместе, как показано на рисунке ниже. Плата контроллера располагается немного ниже центральной оси платы с кнопками, величину смещения лучше получить опытным путем уже в готовом корпусе.

Контроллер заряда и защиты аккумулятора, как указывал ранее, возьмём уже готовый с разъемом micro USB.
Прежде чем соединить все модули вместе, необходимо установить в аккумуляторный отсек латунные контакты. Материал для их изготовления я взял из корпуса разъема Ethernet и USB от материнской платы. С одной стороны под контакт я подставил маленькую пружину, буквально на несколько витков, но этого было достаточно для надежного контакта. Теперь, когда все подготовлено, можно приступать к соединениям модулей. Выполняем монтаж согласно схеме. Для монтажа я брал МГТФ, он очень удобен, обращаю внимание, что на минус и питание двигателя я использовал провод сечением 0,35 мм, остальные коммуникации выполнены проводом 0.15 мм. Для удобства в корпусе есть места для укладки провода, после монтажа его можно закрепить скотчем или термоклеем. Выполнять подключения только с вытянутым аккумулятором!!! После того как монтаж завершен, выполняем проверку и внимательно смотрим полярность установки аккумулятора, делаем соответствующие отметки на корпусе или на малярном скотче. Вставляем аккумулятор, проверяем работоспособность, если что то не так, то проверяем компоненты и монтаж. Устанавливаем все платы на свои места в корпус. Плату контроллера дополнительно крепим при помощи черного термоклея.
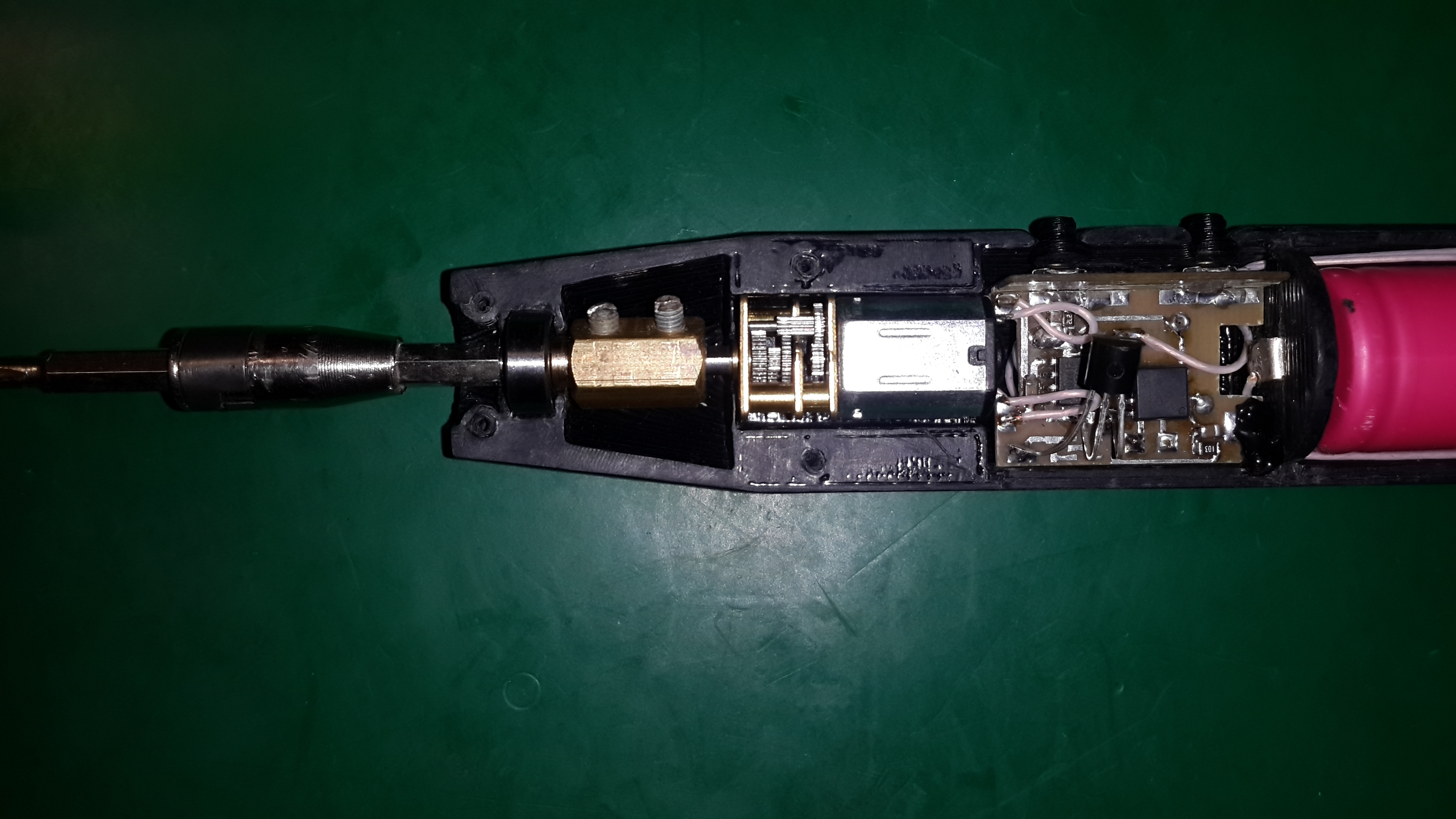
Теперь устанавливаем подшипник. Затем надеваем на вал двигателя муфту, но винт не затягиваем, вставляем мотор с муфтой в корпус. Проточенный хвостовик битодержателя вставляем с наружной стоны в подшипник и сразу заводим его в муфту. Подтягиваем муфту максимально близко к подшипнику и затягиваем оба стопорных винта. Должно получиться как на изображении ниже.
Теперь вставляем оставшиеся толкатели для кнопок, закрываем вторую половину корпуса и завинчиваем саморезами. Все, устройство готово к испытаниям.
Спустя 4 месяца эксплуатации в качестве основного инструмента для сборки/разборки мелкой техники (ноутбуки, планшеты и т.д.) отвертка показала, что проделанные усилия не были тщетны и она достойна занять свое место рядом с остальным инструментом в мастерской. Всего я сделал 2 экземпляра, одну себе, а вторую коллеге, из-за которого все это и началось, у него тоже отзывы положительные. Аккумулятор заряжаю в среднем раз в месяц.
Надеюсь, мой опыт кому то будет интересен или полезен, если не для повторения, то возможно подтолкнет к собственной разработке.
Всем спасибо, кто дочитал до конца!
Все файлы схем и печатных плат, а также исходников моделей и файлы для печати Вы найдете на github.com и thingiverse.com, но репозитории еще в работе.
1. www.thingiverse.com/thing:2746308
2. github.com/levichevdmitry/electric-screwdriver
Источник


