Статья — классический «велосипед», но для начинающих в электронике и робототехнике может быть интересна.
Как известно, самую мелкую и простую робототехнику собирают сейчас на микроконтроллерах типа Atmega или STM. Здесь в статье я принципиально не беру уровень мини-компьютеров типа Raspberry.
В робототехнике, кроме движений, бывает необходимо делать хотя бы оценку окружающего пространства. Так вот — оптического растрового датчика для простых МК мне не попадалось. Популярный «датчик линии» — это не то. Поиск по Гиктаймсу и аналогичным ресурсам дал ссылки на видеокамеры, но они слишком быстрые для простых МК и одну статью про использование 8 шт. светодиодов в качестве фотодиодов.

Поэтому родилась идея сделать примитивный растровый датчик — протоглаз, по аналогии с первыми живыми организмами. Всё, что написано далее, мной делалось только для собственного развлечения, с минимальными затратами и практического применения не предполагалось. Пусть и снова велосипед, но с уважением к Нипкову и отцам механического телевидения.
Подробности под катом…
В распоряжении был один фототранзистор BPW85C. Логично, что из него можно сделать сканер-радар с фокусировкой света на фотодатчике.
Вариант 1.
Для фокусировки можно использовать поворотное параболическое зеркало, а неподвижный фототранзистор разместить в фокусе. Зеркала у меня не было, но был плоский листочек жести. За 3 часа работы руками получилось зеркало размером в 10 копеек и почти параболической формы. 
Параболическое зеркало. Сложно фоткать зеркало))
После сборки поворотной установки обнаружилось, что свет-то попадает не только с зеркала, а ещё со всех сторон. Датчик не закрыть экраном, так как закрывается и большая часть обзора. Пришлось отказаться.
Вариант 2.
Для фокусировки использовать собирающую линзу, собрав аналог фотоаппарата.
Линзы нужного диаметра (12 мм) не нашлось, пришлось тоже руками делать из компакт-диска (там пластик хороших оптических свойств). Да, это суровое детство, деревянные игрушки. Получилось, фокусировка приемлема, фокусное пятно даже меньше чем кристалл фототранзистора.
Вид на линзу.
Поворотная установка – на миниатюрном 15мм шаговом двигателе. Ременная понижающая передача из той же серии – «из ничего». Угол поворота влево-вправо примерно 45°.
Общий вид
Шаговым двигателем через драйвер A4988 управляет МК Amtega328P. Используется режим полушага, и на каждый полушаг происходит считывание сигнала с АЦП МК. До АЦП стоит ещё усилитель на транзисторе, ибо сигнал фототранзистора слабоват. Полученные данные без обработки сразу передаются по RS-232 на компьютер. На компьютере уже строится диаграмма освещённости.
Общий вид
Итого: пока строчная развёртка. Разрешение 320 линий при считывании, реальное разрешение измерить сложно, на тесте с одним точечным источником света получилось 6 / 320, то есть примерно 53 линии на растр.
Но это первая модель, вторая (для 2D) будет в следующей статье.
Тесты:
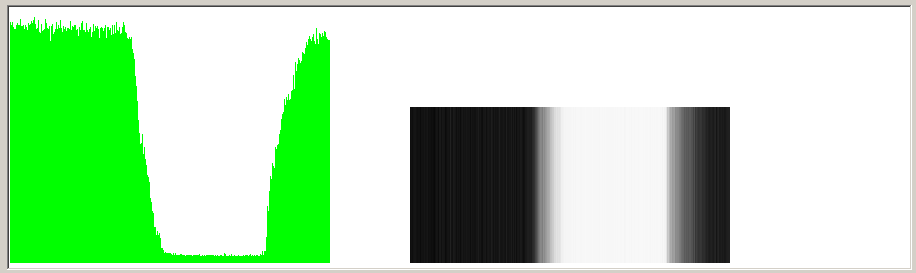
Тест на разное освещение. Зелёная диаграмма – уровень напряжения на АЦП, чёрно-белое изображение – результат преобразования сигнала, что «видит» МК.
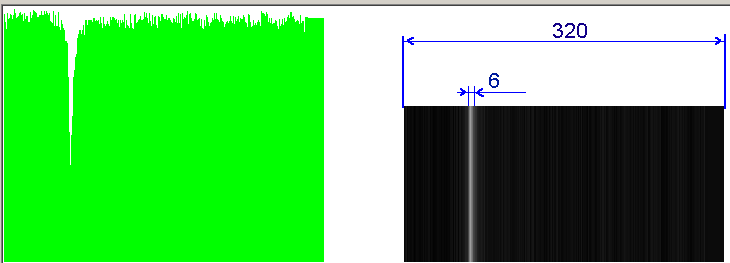
Тест одной точки. Реальное разрешение примерно 53 линии.
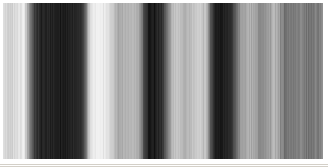

«Съёмка» трёх пальчиковых батареек на светлом фоне.
Скорость «видео» 4 кадра (цикла) в секунду и определяется возможностями ШД. Для гипотетического применения (?) в простейшем роботе – достаточно.
Главное – видеосъёмка занимает мало ресурсов микроконтроллера, остаются возможности и для других действий и даже для распознавания изображения, при необходимости.
Была ещё попытка сделать АРУ (автоэкспозиция), но коэффициент усиления оказался слишком нелинейным. На операционном усилителе сделать можно, в следующих версиях.
Исходники:
Архив с исходниками под CodeVisionAVR и приёмник на VBasic 6
____________________________
Александр.
Источник


