
Как бы это смешно и очевидно не звучало, но для правильного полета необходимо знать, где находится верх, а где низ. Коммерческие дроны используют для этого акселерометр. Но у насекомых, чьи летные навыки заложены генетически и эволюционно, такой «примочки» нет. Возникает вопрос — как они отличают верх от низа? Ученые из Национального центра научных исследований (Париж, Франция) решили провести ряд опытов, чтобы раскрыть эту тайну. Как биологические системы отличают верх от низа, что помогло это понять, и как можно применить полученные знания на практике. Ответы на эти вопросы мы найдем в докладе ученых.
Теоретическая основа
Для любого летающего существа или объекта, будь то насекомое или дрон, сам процесс полета сопряжен с постоянной борьбой против гравитации, т. е. против притяжения. Для этого им крайне важно контролировать свое положение, тем самым определять направление таких сил, как тяга* и подъёмная сила*.
Тяга* — сила, вырабатываемая двигателем и толкающая самолет сквозь воздушное пространство.
Подъёмная сила* — составляющая полной аэродинамической силы, перпендикулярная вектору скорости движения тела в потоке жидкости или газа, возникающая в результате несимметричности обтекания тела потоком.
Летающие роботы могут быть спроектированы так, чтобы иметь пассивно устойчивое положение, а это означает, что им не нужно активно контролировать свое положение, чтобы оставаться в вертикальном положении. К таким роботам относятся те, что имеют неподвижные крылья или хвост с подвижными крыльями.
Проблема в том, что за пассивную устойчивость приходится платить, поскольку она требует минимальной скорости и приводит к снижению маневренности. Действительно, проворные летательные аппараты, такие как летающие насекомые, четырехроторные роботы и бесхвостые роботы с машущими крыльями, по своей природе нестабильны и полагаются на активное управление положением в воздухе. Потому нестабильные летающие роботы и оснащаются акселерометрами, поскольку фильтрация измерений ускорения во времени позволяет получить направление силы тяжести.
На данный момент остается загадкой, как летающие насекомые оценивают свое положение в воздухе, если вообще оценивают. Хотя у насекомых много различных сенсорных модальностей, датчик притяжения, такой как акселерометр, не обнаружен. Сенсорные сигналы, которые несут информацию о направлении силы тяжести при ходьбе (например, нагрузки на ноги), недействительны в воздухе. Летящее тело часто подвергается ускорению, которое больше силы тяжести, в других направлениях, особенно во время маневрирования. Более того, органы с гироскопической функцией, такие как жужжальца у двукрылых, могут способствовать стабилизации, предоставляя информацию о скорости вращения тела, но они не несут информации об абсолютном угле положения как таковом.
В зависимости от вида насекомых скорость вращения может также определяться с помощью жгутиков антенн, деформаций крыльев, оцеллий (глаз) или путем разделения вращательных и поступательных компонентов оптического потока*. В принципе, можно интегрировать скорость вращения, начиная с известного начального положения, но тогда расчетное положение со временем будет дрейфовать.
Оптический поток* — это отображение видимого движения объектов, поверхностей или краев сцены, получаемое в результате перемещения наблюдателя относительно сцены.
Авторы рассматриваемого нами сегодня труда предложили новый метод получения угла положения тела в воздухе за счет объединения оптического потока с моделью движения.
Модели движения обычно используются для оценки состояния летающих роботов, но почти всегда включают измерения от инерциального измерительного устройства, содержащего гироскопы, магнитометры и акселерометры, для определения положения. Уже были попытки оценить углы положения исключительно за счет оптических потоков и моделей движения, но их результаты были неубедительны.

Изображение №1
Ученые решили следовать методологии, используемой в био-робототехнике (1a), для изучения оценки и управления положением на основе оптического потока. Ученым удалось теоретически доказать, что углы положения могут быть оценены при объединении измерений оптического потока с общей моделью движения неустойчивых летательных аппаратов с вектором тяги. Этот тип модели связывает положение тела, то есть углы тангажа* и крена*, с направлением ускорения.
Крен* — поворот объекта вокруг его продольной оси.
Тангаж* — угловое движение объекта относительно главной (горизонтальной) поперечной оси.
Математическое описание сенсорных входов и модели движения позволяет провести формальный анализ наблюдаемости* состояния. Состояние двумерной модели на 1b представляет собой вектор с углом крена, скоростями и высотой, тогда как его сенсорный ввод поступает от одного оптического датчика потока, подобного элементарному детектору движения, направленному вниз от тела. Состояние можно наблюдать, если его можно однозначно определить, отслеживая двигательные действия и сенсорные наблюдения с течением времени.
Наблюдаемость* — свойство системы, показывающее, можно ли по выходу полностью восстановить информацию о состояниях системы.
Было проведено исследование модели вектора тяги для различных уровней сложности, начиная с базовой модели постоянной высоты без сопротивления. Нелинейный анализ наблюдаемости показал, что состояние, включая ориентационный угол (угол положения тела в воздухе), является локально и слабо наблюдаемым. Это означает, что в один момент времени изменения в наблюдении и соответствующие производные по времени могут быть однозначно связаны с изменениями в состоянии. Дальнейший математический и численный анализ показал, что модель даже обладает более сильным свойством локальной наблюдаемости. Это указывает на то, что само состояние может быть определено мгновенно.
Однако наблюдаемость зависит от значений переменных состояния и управляющих входов. В качестве иллюстрации этого на 1d и 1e показана степень наблюдаемости для двух вариантов модели постоянной высоты, в которой более высокая степень означает, что изменения в состоянии можно наблюдать с меньшим трудом.
Модель на 1d оценивает вращательные ускорения, создаваемые его двигательными действиями, тогда как модель на 1e также измеряет скорость вращения. Степень наблюдаемости последней модели выше во всем пространстве состояний, но обе модели имеют ненаблюдаемое состояние при скорости крена p = 0° в секунду. Сначала кажется, что это представляет собой серьезную проблему, поскольку нулевая скорость будет возникать часто, то есть всякий раз, когда контроллер достигает своего целевого угла ориентации или рабочей точки* оптического потока. В технике наличие ненаблюдаемых состояний в ядре системы управления считалось бы неприемлемым и устранялось бы добавлением дополнительных датчиков.
Рабочая точка* — целевое значение переменной или процесса в системе (то есть регулируемой величины).
Ученые же считают, что в природе могла произойти эволюционная адаптация к ненаблюдаемости положения в определенных состояниях. Для базовой модели постоянной высоты было предоставлено доказательство устойчивости системы управления, включая ненаблюдаемые условия. Оно состоит из двух частей. Во-первых, когда состояние является наблюдаемым, контроллер может достичь своей цели управления, что приведет к нулевой скорости, то есть к состоянию, в котором состояние ненаблюдаемо. Во-вторых, когда состояние ненаблюдаемо, шум и помехи приведут к состоянию, в котором состояние снова станет наблюдаемым.
Например, прямое влияние вызывает шум срабатывания при генерации момента, который заставляет модель вращаться, вызывая наблюдаемость. Другим примером является косвенный эффект, вызванный шумом датчика, который приведет к неправильной оценке пространственного положения. Поскольку неправильная оценка будет нецелевой, контроллер выдаст команду на «корректирующее» действие, которое приведет к ненулевой скорости и, следовательно, к наблюдаемому состоянию. Следовательно, система будет постоянно переходить в ненаблюдаемые состояния и выходить из них, что приводит к небольшим колебательным движениям. Иллюстрация этого представлена на 1c, а осцилляции видны на эллиптических траекториях черных линий в (φ, p)-пространстве, показанных на 1d и 1e.
Экспериментальное моделирование с различными уровнями шума подтвердили, что ненаблюдаемые состояния не мешают успешному управлению положением или оптическим потоком. На 1f и 1g показаны характеристики управления для модели без и с изменением скорости.
Математический и численный анализ более сложных моделей показал, что их состояние также локально и слабо наблюдаемо. Введенные сложности включали модель переменной высоты с сопротивлением и ветром, несовершенное прогнозирование тяги, наклонную поверхность и, наконец, полет в общей трехмерной структурированной среде. Положение можно было наблюдать с помощью модели вектора тяги, поскольку она связывает положение с ускорениями и его изменениями, которые фиксируются оптическим потоком и его производными по времени. Однако состояние всегда ненаблюдаемо в условиях идеального зависания, то есть когда положение постоянно и оптический поток компенсируется.
Практические опыты
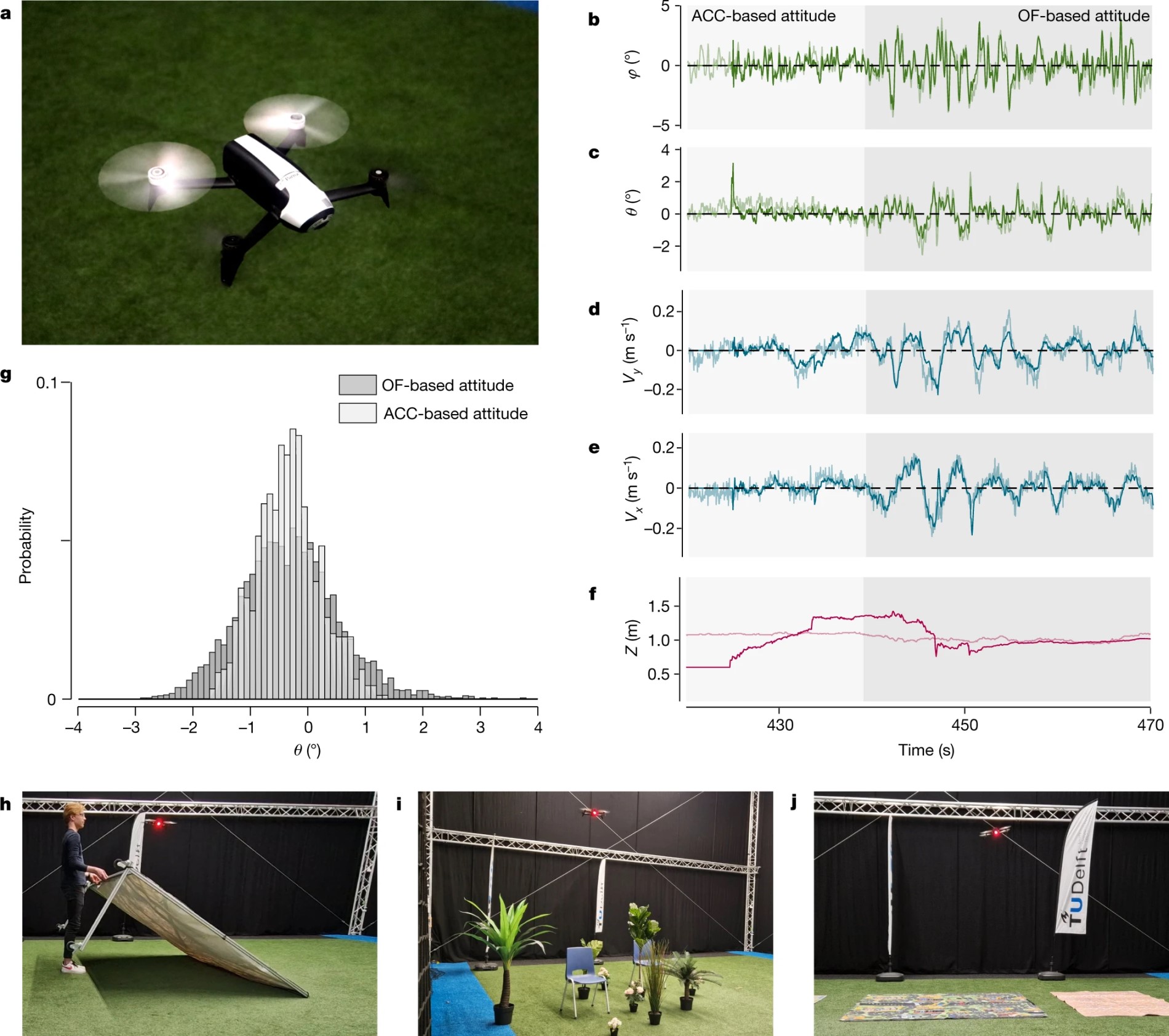
Вышеописанные теоретические выводы были подтверждены на практике во время опытов с квадрокоптером (изображение ниже).
Изображение №2
Коптер наблюдает как продольный, так и латеральный/вентральный оптический поток, фиксируя соотношение горизонтальных скоростей и высоты, а также расхождение оптического потока, представляя соотношение вертикальной скорости и высоты. Цель дрона состоит в том, чтобы зависнуть в одном положении, устраняя подфюзеляжный поток путем оценки и контроля углов крена/тангажа и дивергенции с помощью управления тягой.
Когда дрон летал, используя гироскоп и акселерометр, он мог спокойно зависать в воздухе благодаря этим устройствам (σφ = 0.96, σθ = 0.55; 2g). Переход к изучаемой схеме оценки положения с использованием оптического потока и гироскопов действительно приводит к небольшим колебаниям, что видно из углов положения и скоростей дрона на 2b–2f и из более широкой угловой гистограммы на 2g (σφ = 1.24, σθ = 0.84). Кроме того, высоту труднее всего оценить (2f).
Однако дрон не использует ни расчетную скорость, ни высоту для управления положением. Вместо этого он использует изменения оптического потока.
В целом, оценка положения и управление роботом очень надежны, несмотря на предположения о постоянной высоте и плоской поверхности.
Об этом свидетельствуют дополнительные эксперименты с наклонами или трехмерными структурами под дроном и с угловыми возмущениями (2h–2j и видеоматериалы ниже).
Видеоматериалы практических испытаний:
Видео №1: Полет квадрокоптера с ориентацией на основе оптического потока.
Видео №2: Полет робота с подвижным крылом с ориентацией на основе оптического потока.
Видео №3: Полет квадрокоптера над наклонным склоном.
Видео №4: Полет квадрокоптера над трехмерной структурой.
Видео №5: Полет квадрокоптера с креном под углом 10°.
Видео №6: Полет квадрокоптера над статическим склоном (модель с переменной высотой).
Видео №7: Полет квадрокоптера над динамическим склоном (модель с переменной высотой).
Видео №8: Полет квадрокоптера над трехмерной структурой (модель с переменной высотой).
Аналогичные результаты были получены с моделью различной высоты. Надежность частично связана с обработкой дроном оптического потока по всему полю потока.
Изображение №3
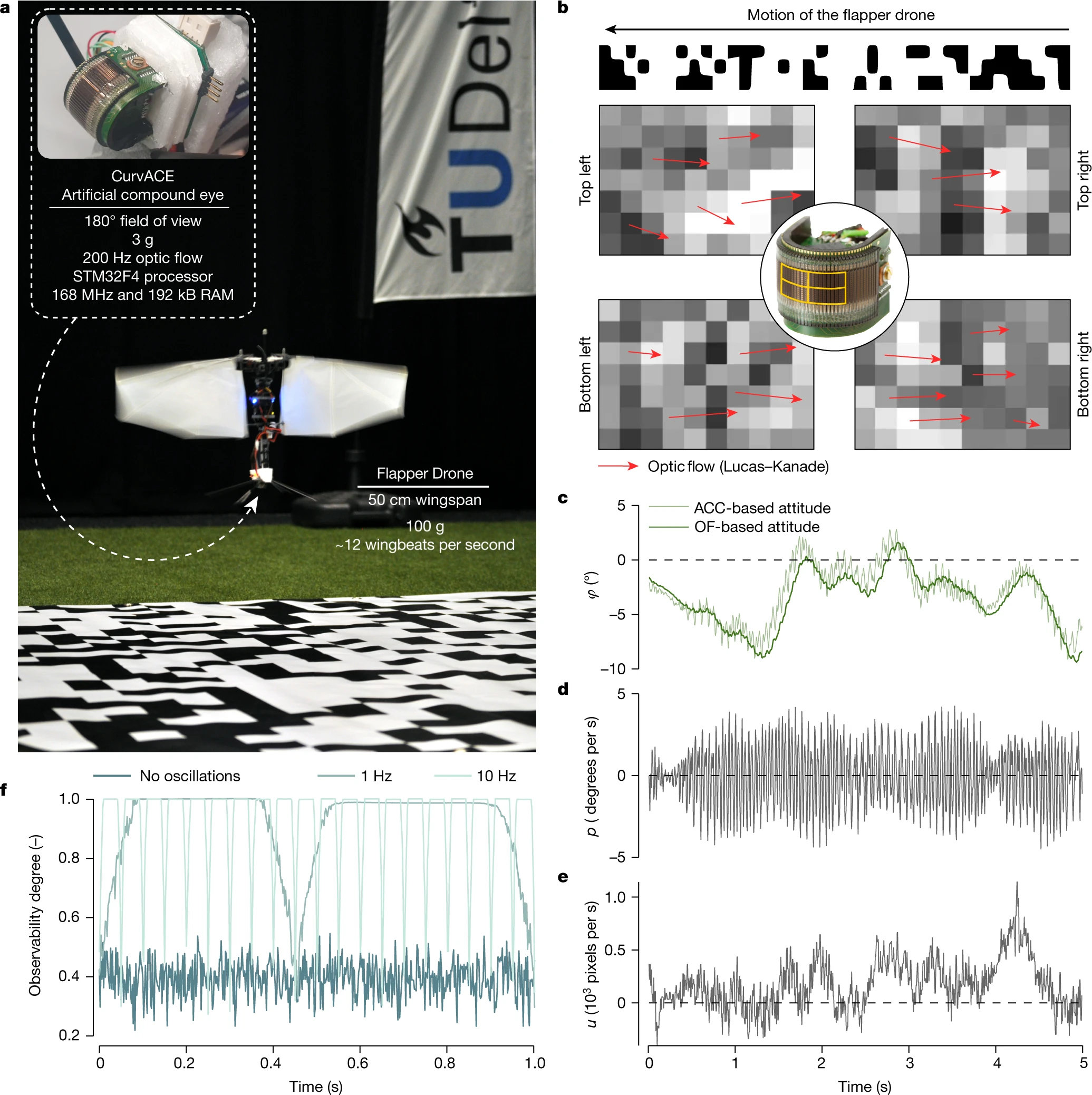
Чтобы максимально приблизить поведения дрона к поведению биологических систем (в данном случае насекомых), ученые провели дополнительные опыты с роботом, оснащенным подвижными крыльями (3a). Данный робот также оснащен искусственным составным глазом CurvACE40 (3b), обладающим широким полем зрения 180°х60° и визуальным разрешением 40х15 пикселей.
Оптический поток определялся в четырех областях с высоким временным разрешением в 200 Гц, близким к частоте слияния мельканий* зрения медоносной пчелы.
Частота слияния мельканий* — временная разрешающая способность зрительной системы в определенный момент времени. Критическая частота слияния мельканий – это максимальная частота вспышек, при которой глаз человека еще способен различать их раздельно, а не сливать воедино.
Другой процесс, от которого зависит кажущееся движение, — это тенденция заполнять промежутки между соседними визуальными объектами, называемая зрительным закрытием. Другими словами, это возможность воспринимать картину целиком, имея при этом ее неполное представление.
Изначально ученые считали, что машущее движение крыльев будет мешать правильной оценке состояния (скорости и оптический поток на 3d и 3e). Однако оценки положения на основе оптического потока были практически идентичны оценкам на основе акселерометра (3c). На 3f видно, что колебания полезны для наблюдаемости, при этом более высокие частоты сокращают продолжительность низкой наблюдаемости. Это открытие предполагает, что летающие насекомые или роботы могут извлечь выгоду из остаточных колебаний махающих крыльев или даже активно индуцировать скорость вращения, чтобы повысить степень наблюдаемости.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
Результаты вышеописанного труда могут оказаться крайне полезны для создания и совершенствования роботизированных насекомых. В качестве примера ученые приводят робота Robobee — этот маленький робот очень ограничен в аспекте внедрения дополнительных устройств. Даже самый мелкий датчик может нарушить его работу.
Демонстрация полета Robobee (Controlled Flight of a Biologically Inspired, Insect-Scale Robot).
Следовательно, используя оптические потоки в качестве источников данных можно исключить необходимость в акселерометрах или датчиках высоты, что для Robobee — просто отличная новость. Другими словами, данный труд предлагает основы для минималистичных летающих роботов, которые при отсутствии определенных компонентов все равно смогут стабильно летать.
Данное исследование также полезно и для энтомологов, особенно изучающих летающих насекомых. Выводы, полученных в ходе исследования, помогают объяснить, какую роль оптический поток может играть в оценке положения и в управлении им. К примеру, известно, что оптический поток необходим журчалкам (Syrphidae) для стабилизации их полета при падении. Поведение журчалок лучше всего объяснялось моделью, включающей углы ориентации, но было неясно, как такие углы оценивались без четкого визуального горизонта в окружающей среде. Теперь же стало ясно, что это возможно, если насекомое обладает моделью движения, связывающей положение в воздухе с направлением ускорения.
Также было получено потенциальное объяснение точности (неточности) полета для различных видов в разных условиях среды. Например, медоносные пчелы все еще могут летать, но менее точно, когда их глазки покрыты непрозрачной краской. Следовательно, оптические потоки играют тут не последнюю роль.
Авторы исследования честно заявляют, что многие из вышеперечисленных гипотез еще предстоит доказать на практике, однако уже сейчас понятно, что летающие насекомые явно используют куда более сложную модель контроля полета, чем считалось ранее. В таком случае возникает вопрос — какую роль играет изученный выше механизм в контексте многих других сенсорных сигналов. Поскольку животные обычно полагаются на избыточные источники информации, даже более крупные животные (к примеру, птицы) могут использовать информацию о зрительном потоке и модели движения для оценки своего положения в воздухе.
Более умозрительный и вполне очевидный вывод заключается в том, что природа является отличным источником вдохновения. Используя знания, полученные в ходе исследования природных биологических систем, ученые могут создавать и совершенствовать свои творения. Если же обратиться к писателям или живописцам, то они скажут, что вдохновение на полу не валяется, а потому его нужно беречь, как зеницу ока. И по отношению к природе этот принцип более чем уместен.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


