
Магнитное поле вращает отдельные винты, которые через верёвочки управляют движением рук, ног и головы игрушки
Есть два способа для дистанционного управления роботом. Или вы пробуете оснастить его автономной двигательной установкой и системой навигации (очень сложно), или делаете очень маленького робота, который двигается в магнитном поле. Робот управляется с помощью больших внешних магнитов. Дистанционное управление такими устройствами особенно востребовано в медицине, тем более что магнитному управлению хорошо подчиняются устройства размером даже в несколько микрометров. Уже прошли эксперименты с дистанционным проведением катетера в сердце и управлением видеозондом в желудочно-кишечном тракте. Огромный потенциал у микромашин для доставки лекарств в конкретные органы человека.
Однако многие перспективные применения магнитного управления требуют скоординированной работы не одного, а многих микророботов одновременно. До сих пор учёные смогли добиться только одновременного движения одинаковых роботов в однородном поле, но не произвольных участников роя. Да, был ряд экспериментов по индивидуальному контролю роботов из роя. Но во всех случаях эти роботы должны отличаться друг от друга магнитными свойствами или по конструкции. Вот почему очень интересна научная работа физиков из исследовательской лаборатории Philips GmbH Innovative Technologies. Они научились закручивать магнитное поле в произвольных местах — и успешно провели эксперименты по закручиванию и откручиванию отдельных винтов, расположенных рядом с друг другом.
На первый взгляд непонятно, как закручивание произвольных винтов связано с управлением роем роботов в человеческом теле. Однако если подумать, то эти задачи очень близки. Ведь управление магнитным полем с такой точностью позволяет создавать магнитную тягу в конкретных участках человеческого тела — именно там, где находится магнитное устройство, которое нужно привести в движение.
Закручивание отдельных винтов с помощью магнитного поля
Принцип работы
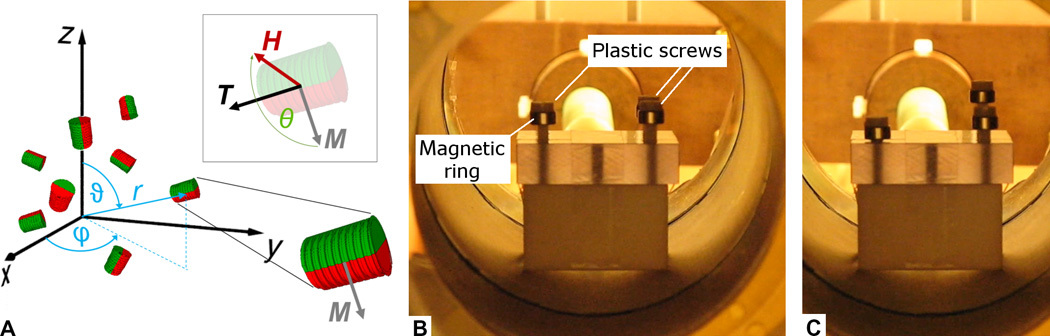
На иллюстрации внизу показан аппликатор поля с диаметром расточки 12 см. Он состоит из трёх пар медных катушек, установленным по трём пространственным осям, и цилиндрических железных сердечников для усиления поля по оси z. Конструкция чем-то похожа по своему принципу на устройство для магнитно-порошковой томографии (magnetic particle imaging, MPI), только здесь ставится противоположная задача — не детектирование с высокой точностью местоположения магнитных частиц, а управление этими объектами с такой же высокой точностью.

Если по двум катушкам параллельно протекает ток одинаковой амплитуды, то вдоль осей возникает пространственно однородное поле, как в кольцах Гельмгольца. Комбинация трёх пар катушек позволяет генерировать однородные динамические поля произвольной ориентации. Если токи одинаковой амплитуды текут в противоположных направлениях, то пара катушек работает как катушка Максвелла, образуя градиентное поле (на иллюстрации вверху справа и на иллюстрации внизу).

Конфигурация идеальной катушки Максвелла
При проведении концептуального эксперимента учёные доказали, что могут закручивать винты, расположенные буквально в произвольных местах внутри генератора поля.
На иллюстрации показано, как рассчитывается направление вектора намагничивания и генерируется крутящий момент. Физика позволяет закручивать/откручивать все винты одновременно или каждый винт по отдельности.
Учёные полагают, что разработанное устройство можно уже сейчас применять в медицине. Например, для закручивания и откручивания винтов, которые размещаются внутри капсул или имплантатов, крепко зафиксированных окружающими тканями человеческого тела. Если капсула зафиксирована, то не будет вращаться вместе с винтом. Более того, сила фиксации капсулы может быть настолько высока, что позволит вкручивать винты или шурупы непосредственно в ткани человеческого организма. Например, в кости.
Возможно, закручивание устройства магнитным полем может быть применимо для движения микророботов в жидкостях организма. В этом случае врачи получат столь необходимое селективное управление роем микророботов в человеческом теле.
Кроме того, более сложными машинами в человеческом организме можно управлять, вращая отдельные управляющие винты, как показано на КДПВ на примере игрушки «Лего» (иллюстрация из научной работы). Это могут быть какие-то сложные имплантаты внутри тела. Возможно, в ортопедии форму имплантатов будут корректировать без необходимости применять моторы или устанавливать элементы питания внутри устройства. Учёные предполагают практическую пользу дистанционного вращения винтов в устройствах для удлинения конечностей, для контроля микронасосов, для дистанционного выпуска лекарств и для точного введения радиоактивных зёрен типа 103Pd внутрь раковых опухолей (контактная лучевая терапия).
Научная статья опубликована 15 февраля 2017 года в журнале Science Robotics (doi: 10.1126/scirobotics.aal2845).
Источник


