Биогибридный двуногий робот: пошаговое продвижение

Когда речь заходит о роботах, то одним из самых распространенных типов является роботизированная рука, т. е. манипулятор. Каркас таких роботов как правило изготовлен из металлов или композитных материалов, тем самым делая его жестким. Мягкая робототехника также не стоит на месте, а ее подраздел, называемый биогибридной робототехникой, изучает возможность создания машин, движимых искусственными мышцами. Ученые из Токийского университета решили уделить внимание роботизированным биогибридным ногам. В ходе своего исследования они пытались создать ноги, способные имитировать гибкость человеческих конечностей и плавность походки. Из чего был изготовлен биогибридный двуногий робот, и как именно он работал? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
С точки зрения движения даже самые современные роботы пока не способны полностью имитировать подвижность и плавность человеческого тела. Тут можно сказать, что у роботов не было того, что было у людей, а именно тысячи лет эволюции. Биогибридные роботы, созданные путем интеграции биологических компонентов и синтетических устройств, пытаются убрать или как минимум размыть эту отличительную грань между людьми и машинами. Многие исследователи предложили биогибридных роботов, приводимых в движение сокращениями культивируемой мышечной ткани. В результате удалось воссоздать несколько простых биомиметических (подражающих биологической системе) движений.
Мышечная ткань является привлекательным биологическим элементом благодаря своей гибкости и бесшумным движениям, а также способности преобразовывать химическую энергию непосредственно в механическую работу. В частности, ткани скелетных мышц являются многообещающим источником движущей силы из-за их способности точно контролировать свои сокращения, в отличие от сердечных мышц, которые демонстрируют спонтанные сокращения. Предыдущие исследования были сосредоточены на биогибридных роботах, приводимых в движение такими мышечными тканями, для реализации двигательных функций в области мягкой робототехники.
Эти биогибридные роботы с возможностью передвижения можно разделить на биогибридных ходоков и пловцов. Обычные биогибридные ходоки используют сократительные движения мышц для деформации роботизированного субстрата, что приводит к продвижению вперед по земле. Между тем, биогибридные пловцы имитируют плавательные движения живых организмов и двигаются, изменяя силу сопротивления в культуральной среде. Однако обычные биогибридные ходоки и пловцы имеют большую длину в направлении оси движения и могут поворачиваться только при движении вперед, что приводит к большой траектории поворота. Поэтому существует опасение, что такого робота невозможно будет использовать в местах с множеством препятствий, для которых требуется способность поворачиваться по малой окружности.
Чтобы обеспечить небольшие круговые повороты, ось вращения робота должна быть зафиксирована, как при двуногом передвижении человека. Обычные биогибридные роботы и тканевые приводы приводятся в действие исключительно силой сокращения мышечной ткани и восстановительной силой, обусловленной эластичностью гибкого субстрата или парной ткани. В результате они не могут использовать гравитацию для фиксации точки контакта с землей, как это делают люди во время двуногой ходьбы. Для достижения поворотов по малой окружности было бы эффективно создать приводной механизм, использующий силу тяжести.
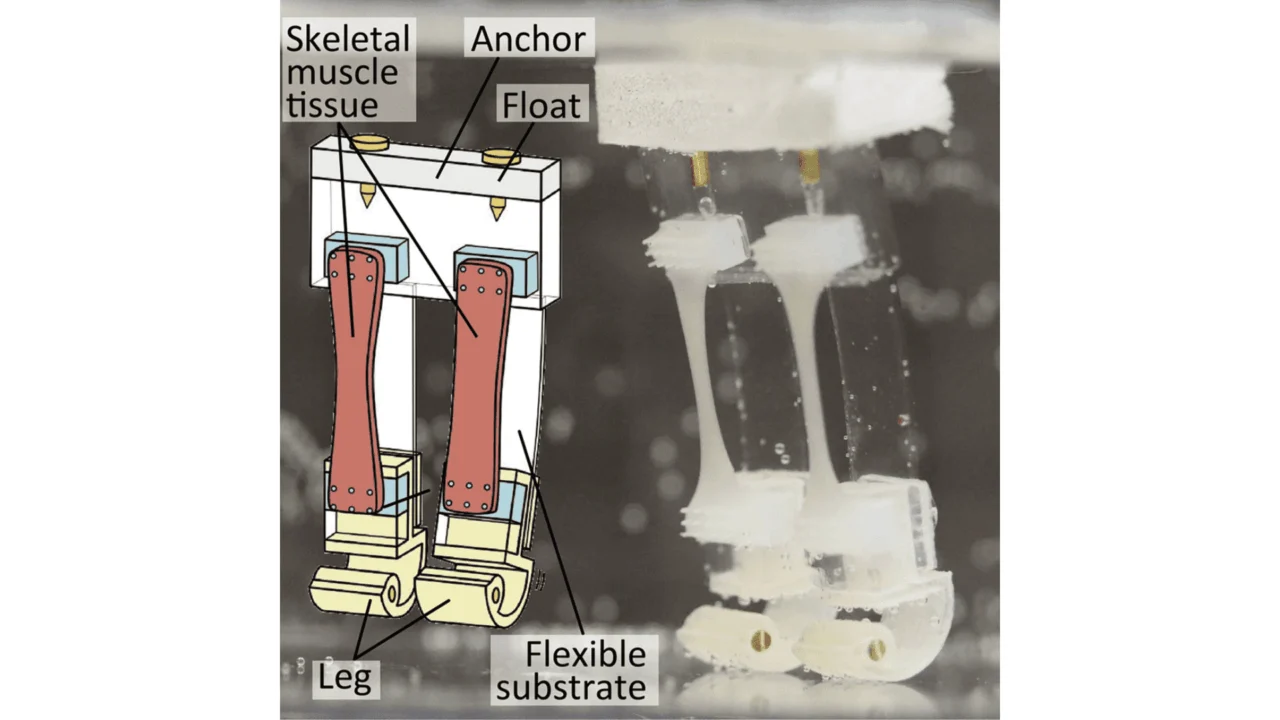
В рассматриваемом нами сегодня труде ученые описывают свое изобретение — биогибридный двуногий робот, работающий на основе культивированных тканей скелетных мышц и позволяющий совершать повороты по траектории небольшой окружности (1A).
Результаты исследования
Процесс изготовления биогибридного двуногого робота, работающего на основе культивированной ткани скелетных мышц, состоит из трех этапов. Первым этапом является изготовление культивированной ткани скелетных мышц в качестве источника движения. Культуральный субстрат был изготовлен с использованием PDMS (от polydimethylsiloxane, т. е. полидиметилсилоксан), а якоря были зафиксированы на обоих концах культурального субстрата. Первичные миобласты суспендировали в гидрогеле, состоящем из фибронектина и матригеля, на культуральном субстрате с образованием наполненного клетками блока гидрогеля, после чего производилось культивирование в инкубаторе.

Изображение №1
По мере развития культуры наблюдалось уменьшение ширины культивируемой ткани скелетных мышц. Это уплотнение блока гидрогеля происходит из-за контакта миобластов с образованием мышечных трубочек. Мышечную ткань выращивали при иммобилизации якоря путем покрытия его фибронектином, т. е. белком клеточной адгезии. Также было установлено, что полимерное покрытие 2-метакрилоилоксиэтилфосфорилхолина (MPC от 2-methacryloyloxyethyl phosphorylcholine) облегчает культивирование ткани скелетных мышц, не прилипая к культуральному субстрату. Такая конфигурация позволяет захватывать якоря пинцетом, а культивированную ткань скелетных мышц можно легко использовать как компонент робота (видео №1).
Видео №1
Второй этап — изготовление скелета робота. Скелет робота состоит из PDMS корпуса, включая поплавок, две гибкие подложки и ноги, включая грузы (1B). Корпус был изготовлен стандартным методом литья, а ножки — на струйном 3D-принтере.
Третий этап — сборка роботизированного скелета и культивированной ткани скелетных мышц. Культивированную ткань скелетных мышц прикрепляли к скелету робота, манипулируя креплениями ткани. Механизм ходьбы показан на 1C. Сначала одна нога становится неподвижной из-за сокращения культивированной ткани скелетных мышц. Когда культивированная ткань расслабляется, нога приземляется в переднем положении под действием груза, прикрепленного к ней. Самоориентация ноги под действием груза позволяет ноге подняться и подтолкнуть тело вперед. Робот выполнял движения, чередуя этот процесс слева направо.

Изображение №2
Морфологический и функциональный анализ был проведен для характеризации культивированной ткани скелетных мышц (2A). Форма культивируемой ткани скелетных мышц менялась по мере увеличения количества дней культивирования. Ширина ткани уменьшилась до 56% от начальной на второй день культивирования. После шестого дня уменьшения ширины мышечной ткани не наблюдалось. Это морфологическое изменение может быть связано с тем, что миобласты сливаются и становятся многоядерными, образуя волокна скелетных мышц на ранних стадиях культивирования.
Результат анализа жизнеспособности клеток в культивируемой ткани скелетных мышц показывает, что почти все клетки были живы (2B). Это указывает на то, что предлагаемый метод культивирования подходит для подготовки культивированной ткани скелетных мышц. Кроме того, в мышечных трубках наблюдались полосатые узоры альфа-актинина (2C), демонстрируя, что саркомеры* образовывались в культивируемой ткани скелетных мышц.
Саркомер* — базовая сократительная единица поперечнополосатых мышц, представляющая собой комплекс нескольких белков, состоящий из трех разных систем волокон. Из саркомеров состоят миофибриллы.
Этот результат указывает на то, что культивированная ткань скелетных мышц имеет развитую морфологию, необходимую для сократительной скелетной мышцы. Конфокальная микроскопия также показала, что мышечные трубки были выровнены в одном направлении в искусственной ткани скелетных мышц (2C). Эти морфологические анализы позволяют предположить, что скелетная мышечная ткань, построенная с помощью разработанного метода, представляет собой поперечнополосатую мышечную ткань, обеспечивающую однонаправленное сокращение.
Чтобы исследовать изготовленную скелетную мышечную ткань, ее помещали на устройство для измерения силы сокращения с кантилеверами (механический зонд в атомно-силовом микроскопе), а сократительную силу измеряли в соответствии с деформацией этих кантилеверов. Проводилась оценка изменений частоты приложенных электрических импульсов. В результате было подтверждено, что сокращения культивированной ткани скелетных мышц были синхронизированы с приложенными электрическими импульсами, когда импульсы составляли 1 и 2 Гц (2D). Этот результат указывает на то, что культивированную скелетную мышечную ткань можно контролировать и можно использовать в качестве привода для двуногого шагающего робота.
Далее была проведена оценка сократительной силы при изменении величины электрического поля. Относительно слабые сократительные силы (0.61 мН) наблюдались при воздействии электрических импульсов частотой 1 Гц на мышечную ткань, а большие сократительные силы (1.9 мН) тетанических сокращений возникали при применении электрических импульсов частотой 50 Гц. В относительно небольшом диапазоне электрического поля 0-0.7 В/мм сократительная сила увеличивалась почти линейно по мере увеличения электрического поля Это позволяет предположить, что ею можно управлять как роботизированным приводом в этом электрическом поле. Когда величина электрического поля превышала 0.7 В/мм, сократительная сила культивируемой ткани скелетных мышц имела тенденцию сходиться к постоянному значению (2E). Эта взаимосвязь между величиной электрического поля и сократимостью является той же самой характеристикой, которая наблюдается в обычной культивируемой ткани скелетных мышц.
Кроме того, сократительный стресс культивированной ткани скелетных мышц оценивался в 0.72 мН/мм2 исходя из силы тетанического сокращения (1.9 мН) и площади поперечного сечения мышечной ткани (высота: 1.2 мм, ширина: 2.2 мм) при оценке с прямоугольной формой поперечного сечения. Поскольку скелетная мышца 3-5-дневных крыс составляет 0.32 мН/мм2, ученые полагают, что сократительные свойства скелетных мышц сравнимы с таковыми у новорожденных крыс.

Изображение №3
Для оценки передвижения было смоделировано движение двуногого робота. Когда при моделировании были применены сократительные силы скелетной мышечной ткани, полученные в результате экспериментальных результатов, наблюдалась деформация гибкого субстрата и отделение ноги от земли. Это говорит о том, что изготовленная скелетная мышечная ткань производит достаточную мощность для подъема нога (3A). С помощью анализа, зависящего от времени, ученые разделили передвижение двуногого робота на три фазы: фаза 1 — подъем, фаза 2 — зависание и фаза 3 — приземление (3B).
В фазе 1 сокращение скелетной мышечной ткани вызывало постоянное увеличение расстояния подъема (PY) ноги (3C). После достижения PY максимальной точки двуногий робот переходил к фазе 2, в которой расстояние шага (PX) и колебания PY в противоположных фазах происходили за счет эластичности гибкого субстрата и ткани скелетных мышц. Во время фазы 2 PX достиг своего пика, когда PY был на минимуме. На время и амплитуду колебаний влияла конструкция двуногого робота. Однако, чтобы выяснить взаимосвязь между расчетными параметрами и максимальным значением PX, сила сжатия высвобождалась в тот момент, когда PX достигала своего пика. Фаза 3 иллюстрирует траекторию от вершины PY до уровня земли. На этом этапе PY снижался из-за веса ноги, и нога робота касалась земли.
Чтобы исследовать взаимосвязь между параметрами конструкции и ходьбой, ученые проанализировали корреляцию между PX, PY, весом ноги и толщиной гибкой подложки. По мере увеличения веса ноги максимальное значение PX во время фазы 3 имело тенденцию к повышению, на что влияет увеличение амплитуды колебаний (3D). С другой стороны, минимальное значение PY во время фазы 2 уменьшалось, когда вес ноги увеличивался из-за увеличения силы гравитации (3E). Чтобы добиться более высокого PX без касания к земле во время движения, вес ноги следует установить в пределах 0.8-1.7 мН. Затем, когда толщина гибкой подложки увеличивалась при той же силе сжатия, максимальное значение PX на этапе 3 уменьшалось (3F). Увеличение жесткости гибкой подложки затрудняло ее деформацию под действием силы сжатия.
Между тем, максимальное значение PY во время фазы 2 уменьшалось до достижения толщины 1.0 мм, но демонстрировало небольшое увеличение при толщине 1.25 и 1.5 мм (3G). Эффект увеличения жесткости гибкой подложки имел доминирующий эффект до 1.0 мм, что приводило к уменьшению положения подъема. Поскольку в качестве материала гибкой подложки использовался PDMS, который имеет меньшую плотность, чем вода, увеличение эффекта плавучести гибкой подложки привело к подъему всего робота на толщину более 1.0 мм.
Судя по результатам моделирования, ожидается, что более тонкая гибкая подложка будет обеспечивать наиболее эффективное передвижение двуногого робота.

Изображение №4
Ученые подтвердили срабатывание биогибридного двуногого робота, контролируя сокращение культивированной ткани скелетных мышц. Сокращение одной ткани скелетных мышц вызывалось электрическим полем, создаваемым при помещении пары золотых электродов близко к мышечной ткани. Когда электрические импульсы применялись к культивированной ткани скелетных мышц, прикрепленной к биогибридному роботу, сокращение ткани вызывало изгиб гибкого субстрата робота и подъем ног (4A). Отслеживая движение, измерялось угловое смещение (q) гибкой подложки. Движение биогибридного робота контролировалось частотой и величиной приложенного электрического поля (длительность импульса составляла 10 мс).
Для электрических импульсов частотой 1 Гц деформация подложки синхронизировалась с электрическими импульсами. При более высоких частотах (выше 25 Гц), когда характер сокращения менялся от подергивания* к тетанусу*, сократительная сила культивируемых скелетных мышц увеличивалась и насыщалась, поскольку накладывалось одиночное сокращение, вызванное одним электрическим импульсом.
Подергивание* — одиночный цикл сокращения и расслабления, вызываемый потенциалом действия внутри самого мышечного волокна.
Тетанус* (или тетаническое мышечное сокращение) — состояние длительного сокращения, непрерывного напряжения мышцы, возникающее при поступлении к ней через мотонейрон нервных импульсов с высокой частотой.
В результате добротность гибкой подложки достигла максимума на частотах более 50 Гц (4B). Значение q гибкого субстрата при подергивании и тетанусе культивируемой ткани увеличивалось с увеличением величины электрического поля и насыщалось до почти постоянного значения выше 0.8 В/мм (4C).
Эти результаты показывают, что степень срабатывания биогибридного робота можно контролировать с помощью частоты электрических импульсов и величины электрического поля.
Далее ученые исследовали, можно ли контролировать степень срабатывания биогибридного робота за счет толщины гибкой подложки. Было подтверждено, что q гибкой подложки уменьшалось по мере увеличения толщины (4D), как показано в моделировании (3F). Результат показывает, что более тонкая гибкая подложка толщиной 0.25 мм, как ожидается, будет обеспечивать наиболее эффективное передвижение двуногого робота. Однако из-за трудностей изготовления тонкой подложки и опасений разрывов в процессе изготовления ученые решили, что для двуногого робота будут использоваться гибкие подложки толщиной 0.5 мм.
Более того, ученые изучили различия в поведении биогибридного робота в зависимости от того, как располагались электроды при работе робота. Золотые электроды помещали по диагонали и горизонтально к культивируемой ткани скелетных мышц, установленной на биогибридном роботе, затем измеряли q гибкого субстрата (4E).
В результате количество q гибкого субстрата при сокращении культивированной ткани было больше, когда пара электродов была размещена в диагональном направлении, чем когда электроды были расположены в горизонтальном направлении (4F). Чтобы выяснить причину этого, ученые провели моделирование с использованием метода конечных элементов. Поскольку известно, что ткань скелетных мышц демонстрирует сократительное движение в ответ на компоненты электрического поля вдоль волокон скелетных мышц, ученые сравнили компоненты электрического поля в направлении длинной оси ткани. Сравнение подтвердило, что количество q гибкой подложки было больше, когда электроды были расположены в диагональном направлении, чем когда они были расположены в горизонтальном направлении. Потому такое расположение электродов было использовано для робота.

Изображение №5
Далее ученые провели демонстрационные опыты с двуногим роботом. Сначала робота настроили для движения вперед. Золотые электроды были помещены рядом с культивированной тканью скелетных мышц, прикрепленной к ногам двуногого робота, и началась электрическая стимуляция (электрическое поле 1.2 В/мм, ширина импульса 10 мс, частота 50 Гц, время стимуляции 1 секунда), применяемая один раз каждые 5 секунд (5A и видео №2).
Видео №2
Когда электрическая стимуляция была применена к культивированной ткани левой ноги, она сократилась примерно на 0.8 мм, что привело к значительному искривлению гибкого субстрата левой ноги по сравнению с ее исходным состоянием. В этом состоянии, как показано в результатах моделирования (3C), кончик ноги колебался вперед и назад под действием веса опоры. Затем пятка левой ноги соприкоснулась с поверхностью акрилового квадратного контейнера, расслабив ткань скелетных мышц, и левая половина тела переместилась вперед за счет упругости подложки.
В зависимости от этого принципа робот может выполнять движение вперед при соответствующей электрической стимуляции левой или правой ткани скелетных мышц. Пока робот двигался, нога, не подвергавшаяся электрической стимуляции, оставалась на дне акрилового контейнера. Расстояние ходьбы составило 9.3 мм при включении робота в течение 103 секунд, а средняя скорость ходьбы составила 5.4 мм/мин (5B).
При поворотном движении робота культивированная скелетная мышечная ткань правой ноги неоднократно подвергалась электрической стимуляции, в результате чего становилась бездействующей (ввиду подвешенного состояния). Пятка правой ноги затем опиралась на землю, а правая половина тела двигалась вперед. Выполняя это действие последовательно, двуногий робот мог выполнить поворот влево (5C и 5D; видео №3).
Видео №3
Двуногий робот совершил поворот на 90 градусов за 62 секунды с одной стимуляцией каждые 5 секунд, а угловая скорость составила 1.4/с (5E). Во время поворота нога, не подвергавшаяся электрической стимуляции, выполняла функцию осевой и поддерживала робота на земле практически без смещения положения.
Видео №4
Нога с культивированной тканью скелетных мышц становилась бездействующей только тогда, когда ткань подвергалась электрической стимуляции, а робот останавливался без применения электрической стимуляции (5F; видео №4). Эти результаты доказывают, что биогибридный двуногий робот способен совершать точную локомоцию.
Для более детального ознакомления с исследованием рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые описали свою удивительную разработку — двуногого биогибридного робота, способно двигаться за счет сокращения культивованных тканей скелетных мышц.
Полученный робот мог идти прямо и поворачиваться, и все за счет применения электрического поля. Когда ученые воздействовали на мышечную ткань электрическим стимулом, она сокращалась, поднимая ногу вверх. Когда стимул завершался, пятка ноги приземлялась чуть вперед робота. Поочередно используя стимул для левой и правой ноги каждые 5 секунд, ученые заставляли биогибридного робота идти вперед со скоростью 5.4 мм/мин.
Чтобы заставить робота повернуться, ученые применяли стимулы к правой ноге несколько раз каждые 5 секунд. Левая нога в этот момент исполняла роль опоры. Робот совершал поворот налево на 90 градусов за 62 секунды.
Пока электроды перемещаются вручную, но в будущем они могут быть интегрированы в тело робота, тем самым повысив скорость его движения. Также ученые намерены наделить робота суставами и более толстыми мышечными тканями, чтобы обеспечить более сложные и уверенное движения. Но куда более важной задачей является создание пути доставки питательных веществ, которые будут поддерживать жизнь тканей и структур, используемых в роботе.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
Похожие статьи
 Астрофизика: обзор июньских препринтов 2026 года
Астрофизика: обзор июньских препринтов 2026 года Обзор небезынвестного суперстрата Cort G250 Spectrum
Обзор небезынвестного суперстрата Cort G250 Spectrum О микроводорослях, недостижимых идеалах и оплачиваемом веганами будущем
О микроводорослях, недостижимых идеалах и оплачиваемом веганами будущем Как школьное уравнение скрывает в себе гиперболический тангенс
Как школьное уравнение скрывает в себе гиперболический тангенс Июльский дайджест технических новостей, лонгридов и переводов от Хабра 2026 года
Июльский дайджест технических новостей, лонгридов и переводов от Хабра 2026 года Что почитать на выходных: «Теория каст и ролей» Алекса Крола
Что почитать на выходных: «Теория каст и ролей» Алекса Крола Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда
Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда