
Около 70% поверхности Земли покрыто водой, потому нет ничего удивительного, что многие сухопутные живые существа обладают умением плавать. Люди также способны обучиться этому навыку, но не обладают им с рождения, как утверждает распространенный миф. Разные пловцы, независимо от видовой принадлежности, используют разные техники плавания, чтобы максимизировать эффективность продвижения вперед и минимизировать затраты энергии, учитывая строение тела и другие сопутствующие факторы. Одним из самых распространенных методов является баттерфляй. Ученые из университета штата Северная Каролина (США) разработали мягкого робота-пловца, который, используя технику баттерфляй, способен достигать рекордных скоростей. Какова конструкция робота, какие физические принципы лежат в основе его работы, и насколько он быстр? Ответы на эти вопросы мы найдем в докладе ученых.
Основа исследования
Для нас баттерфляй это техника плавания на животе, когда пловец совершает симметричные движения руками в виде широкого и резкого гребка, ноги и таз в этот момент совершают волнообразные движения (как у дельфинов). Если же рассматривать других животных, то подобные взмахи конечностями присущи как пловцам, так и летунам. Независимо от вида, существа используют сгибание и/или вращение гибких крыльев, плавников, тела или хвостов для пассивного повышения эффективности движения с целью экономии энергии. Среди них многие двигаются в крейсерском режиме в узком диапазоне безразмерного числа Струхаля* (St), определяемого как St = fA/U (f и A — частота и амплитуда взмахов, U — поступательная скорость), т.е. 0.2 < St < 0.4 для высокой энергоэффективности.
Число Струхаля* — безразмерная величина, один из критериев подобия нестационарных (часто колебательных) течений жидкостей и газов.
С развитием робототехники многие ученые и инженеры пытались создать роботов, имитирующих вышеупомянутых летунов и пловцов, используя при этом технику баттерфляй. Однако, что не удивительно, характеристики роботов были значительно хуже, чем у животных. К примеру, скорость движения (BL/s — длина тела в секунду) у таких роботов не превышала 1, тогда как у некоторых морских животных она может варьироваться от 2 до 24. Такая же картина сохраняется и в оценке эффективности: St > 1 или St < 0.1 у мягких роботов по сравнению с 0.2 < St < 0.4 у морских животных.
Потому создание мягких роботов, способных конкурировать со своими природными прототипами, до сих пор остается сложной задачей. Авторы рассматриваемого нами сегодня труда нашли решение этой проблемы в виде щелчковых бистабильных гибких крыльев. В данном контексте щелчок — это быстрое движение, которое часто наблюдается в природе (например, быстрое закрытие венериной мухоловки). Бистабильность крыльев обусловлена наличием у них двух отдельных стабильных форм. Они могут обратимо переключаться из одной стабильной формы в другую в течение десятков миллисекунд и оставаться в любом стабильном состоянии без потребления энергии.
Ученые отмечают, что в последнее время использование бистабильности для высокопроизводительных мягких роботов стало одним из лучших способов решения проблем, связанных с податливостью мягкого тела, таких как медленная реакция и малая сила. Бистабильность обеспечивает быструю реакцию и усиление силы в мягких приводах за счет быстрого высвобождения энергии во время щелчка. Для водных роботов это особенно полезно, так как им приходится преодолевать куда большее сопротивление, нежели на суше или в воздухе.
Изображение №1
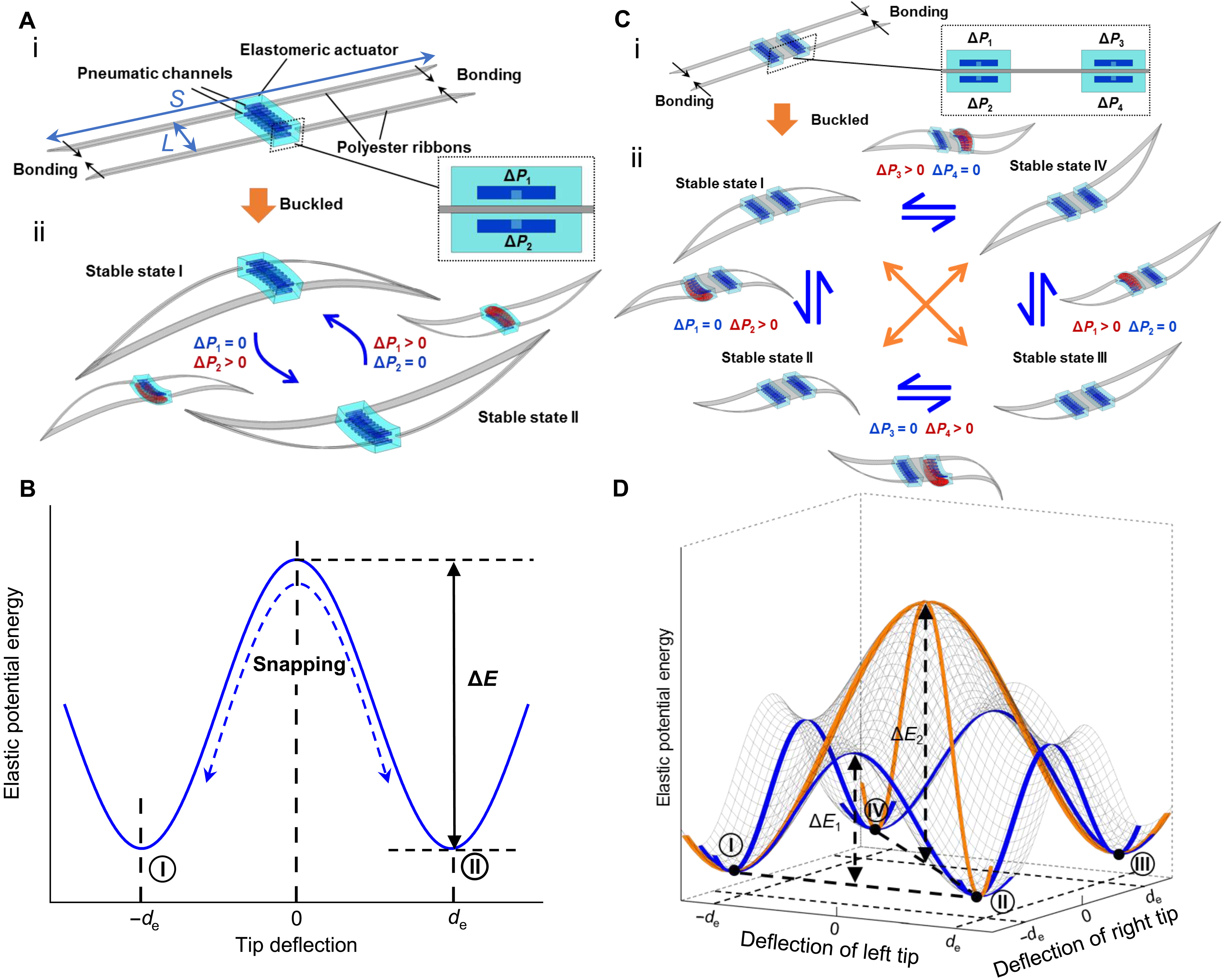
В труде, о котором сегодня идет речь, ученые продемонстрировали прототип конструкции бистабильных и мультистабильных роботов, состоящих из изгибающихся актуаторов и предварительно изогнутых гибких крыльев (изображение №1). Привод взмахов сконструирован путем соединения двух параллельных лент каркаса крыла на конце, чтобы сформировать пару бистабильных предварительно изогнутых гибких крыльев (1А). Приведенное в действие небольшое сгибание мягкого тела может вызвать пассивное щелканье крыльев для значительного усиления взмахов и вращательных движений.
Описание и характеристики робота-пловца
На 1A показана схема конструкции мягкого бистабильного привода взмаха. Он состоит из мягкого корпуса и двух прикрепленных бистабильных гибких крыльев. Мягкий корпус (L = 22.8 мм, W = 10 мм, T = 6.55 мм) представляет собой эластомерный пневматический привод двунаправленного изгиба, изготовленный из материала Ecoflex, который имеет два встроенных стержнеобразных пневматических канала сверху и снизу. Мягкий корпус может изгибаться вверх и вниз при давлении на нижнюю (∆P2 > 0) и верхнюю камеру (∆P1 > 0) соответственно (1Aii).
Гибкий каркас из двух крыльев принимает первоначальную плоскую Н-образную форму за счет соединения двух параллельных длинных полиэфирных лент с эластомерной пластиной посередине. Затем он вставляется между пневматическим приводом изгиба (1Ai), образуя цельную конструкцию. Длина ленты определяет длину размаха крыла (S). Затем соединение двух концов Н-образных лент вызывает боковую деформацию кручения, так и деформацию сжатия, что приводит к короблению (деформации) двух соединенных лент в изогнутой и скрученной раме крыла вне плоскости. В следствии образуется мягкий провод взмахов с парой бистабильных изогнутых каркасных крыльев с предварительно сохраненной энергией упругой деформации (1Aii).
Кривизну и форму сформированных предварительно изогнутых крыльев можно настроить с помощью S. Пневматический привод мягкого корпуса преодолевает энергетический барьер (∆Е) в бистабильных крыльях (1B) и вызывает их одновременное и быстрое сгибание (так называемый щелчок). Последовательность таких щелчков создает эффект машущего крыла (1Aii и видео №1).
Видео №1
Вышеописанная бистабильная система может быть расширена до мультистабильной. Два пневматических привода изгиба можно соединить параллельно и скрепить Н-образным каркасом из полиэфирной ленты посередине (1Ci), тем самым создав мультистабильную конструкцию. Такая конструкция допускает четыре различных стабильных формы изгиба двух крыльев (1Cii).
На 1D показан схематический трехмерный энергетический ландшафт мультистабильной конструкции, который демонстрирует один пик в центре (неустойчивое состояние) и четыре соседних локализованных минимальных ям*, которые соответствуют четырем различным стабильным состояниям на 1Cii.
Потенциальная яма* — область пространства, где присутствует локальный минимум потенциальной энергии.
Взмах любого бистабильного крыла может приводиться в действие независимо; таким образом, он может переключаться между этими четырьмя комбинаторно стабильными формами (видео №2).
Видео №2

Изображение №2
Поскольку размах крыльев (S; 1А) играет доминирующую роль в определении не только предварительно сохраненной энергии деформации, но и силы тяги во время плавания, ученые первым делом решили изучить влияние S на предварительно изогнутые формы крыльев и их бистабильные характеристики с помощью комбинированных экспериментов (2Ai), аналитического моделирования (2Aii) и моделирования методом конечных элементов (2Aiii). Для изучения был выбран диапазон значений S от 140 до 170 мм.
На 2Ai показаны наложенные друг на друга изображения предварительно изогнутых бистабильных каркасов крыльев с разным значениями S. Каркас крыла изгибается как в плоскостях XY, так и в плоскостях YZ из-за искажения, вызванного склеиванием концов. Их предварительно изогнутые формы могут характеризоваться двумя изгибными кривизнами, т. е. кXY (или угол изгиба α; вставка на 2В) в плоскости XY и кYZ (или угол изгиба γ; вставка на 2С) в плоскости YZ.
Ученые предположили, что кривизна в обеих плоскостях будет равномерной из-за большого соотношения сторон S/L (от ~ 6.1 до 7.5, где L — длина тела, а также расстояние между параллельными лентами на 1А) и малой максимальной главной деформации (~ 0.3 % для S = 150 мм; вставка на 2D) вдоль лент. Как и ожидалось, чем меньше длина размаха крыла, тем выше создаваемое им предварительное напряжение и большая кривизна, а также большая жесткость на изгиб. Соответственно, при увеличении S со 140 до 170 мм углы изгиба α и γ уменьшаются с ~43.2° до ~35.4° и с ~73.4° до ~66.2° соответственно. По сравнению с кYZ, S оказывает более заметное влияние на кXY. Соответствующие результаты моделирования методом конечных элементов хорошо согласуются с экспериментами (2Aiii, 2B и 2C).
Чтобы лучше понять влияние S на форму искривленного крыла, ученые разработали аналитическую модель для прогнозирования формы крыла путем минимизации общей энергии упругой деформации, хранящейся в системе. На 2D показана теоретически предсказанная плотность энергии деформации u как функции S. Этот график показывает, что при увеличении S от 120 до 180 мм u нелинейно уменьшается более чем наполовину с примерно 1.09 до 0.48 мДж/мм, что согласуется с соответствующими результатами моделирования методом конечных элементов. Более высокая плотность энергии деформации при меньшем S также указывает на более высокий энергетический барьер.
В дополнение к S, как показано в аналитической модели, форма предварительно изогнутого крыла также может быть настроена с помощью размера актуатора изгиба (L), а также жесткости гибкой ленты, определяемой ее модулем Юнга и геометрией (например, соотношение сторон поперечного сечения ленты, т. е. отношение ширины ленты wr к толщине hr, wr/hr). Анализ показал, что, когда величина S фиксирована, увеличение длины корпуса (L) привода изгиба приводит к увеличению кривизны изгиба и жесткости изгиба, а также к более высокой критической силе щелчка; т. е. увеличение L аналогично эффекту уменьшения S. И наоборот, увеличение wr/hr практически не изменяет форму предварительно изогнутого крыла, тогда как приводит к более высокой критической силе щелчка из-за повышенной жесткости на изгиб.
Таким образом, геометрически, чем больше отношение L/S в приводе, тем большую кривизну и предварительно запасенную энергию он будет генерировать.

Изображение №3
Далее ученые приступили к изучению динамического поведения мягкого бистабильного привода взмаха при пневматическом срабатывании с зажатым одним концом. На 3A показаны девять состояний привода (S = 150 мм), которые фиксировались высокоскоростной камерой во время одного цикла хода вниз (щелчок) и хода вверх (щелчок назад) (видео №3). Кончики крыла отмечены оранжевыми точками, изогнутый конец мягкого корпуса — синими, а центр массы — красными. Давление срабатывания составляло 55 кПа, а частота срабатывания — 0.714 Гц.
Видео №3
На 3А видно, что пневматический изгиб и небольшая деформация удлинения в приводе корпуса одновременно усиливают вращение по часовой стрелке и взмахи обоих крыльев за счет щелчка. Это резко контрастирует с обычными приводами взмаха или колебания, которые подвергаются только изгибу, а не комбинированному изгибу и вращению. Следовательно, это приводит к интересной замкнутой траектории концов крыла в форме восьмерки в плоскости XZ (3B). Подобная картина наблюдается у колибри и шмелей, которые аналогичным образом машут крыльями для увеличения силы тяги (3С и 3D).
Во время щелчка может достигаться мгновенная пиковая скорость кончика крыла vmax-x ≈ vmax-z ~6.6 м/с (vmax-y ~3.2 м/с) и мгновенная скорость ускорения amax-x ≈ amax-z ≈ 1.49 × 103 м/с2 (amax-y ≈ 1.39 × 103 м/с2), что на порядки превышает ускорение свободного падения, демонстрируя значительно улучшенные динамические характеристики.
После щелчка возникает вибрация и демпфирование, которые в значительной степени подавляются во время плавания (видео №4). Щелчок может в значительной степени усилить как вращательное, так и взмахивающее движение крыльев за счет внезапного высвобождения накопленной энергии деформации. При этом для этого требуется относительно небольшая деформация изгиба в мягком корпусе с низкой энергией срабатывания.
Видео №4
Чтобы лучше понять связь между пневматической деформацией корпуса и усиленным взмахом крыла, ученые измерили угол изгиба (φbody; 3F) и отклонение (dbody; 3G) корпуса в зависимости от давления срабатывания. Дополнительно были измерены соответствующие изменения угла поворота (φwing; 3H), угла взмаха (θwing; 3I) и прогиб крыла (dwing; 3B).
При надувании верхней камеры, т. е. при движении вниз из состояния i в состояние ii перед щелчком, корпус изгибается вниз, при этом его угол изгиба φbody уменьшается относительно линейно от 10° до примерно −20° с увеличением давлением, т. е. ∆i–iiφbody составило примерно −30° (3F). Прогиб корпуса (dbody) линейно уменьшается с 2.5 мм до примерно -7.2 мм, т. е. ∆i–iidbody равен -9.7 мм (3G).
Касательно крыльев, то угол их поворота (φwing) уменьшается линейно от 75° до ~40°, т. е. ∆i–iiφwing составляет примерно −35° (3H), а угол взмаха (θwing) практически не меняется и составляет ~20°, т. е. ∆i–iiθwing равен примерно −1° (3I), прогиб крыла немного уменьшается при ∆i–iidwing примерно −9.7 мм.
При переходе из состояний ii в iii было замечено, что относительно небольшая деформация в мягком корпусе может вызвать вполне заметную деформацию в крыле. По сравнению с деформацией перед щелчком, щелчок вызывает примерно в 4.9 раза большее изменения угла поворота крыла (т.е. -60° по сравнению с примерно -1° на 3I) и в 4 раза большее изменения прогиба крыла (т.е. -38.8 мм по сравнению с -9.7 мм на 3G). Подобное влияние щелчка также наблюдалось и во время движения крыла вверх, т. е. при переходе из состояния vi в vii (3B и 3G—3I).
Изображение №4
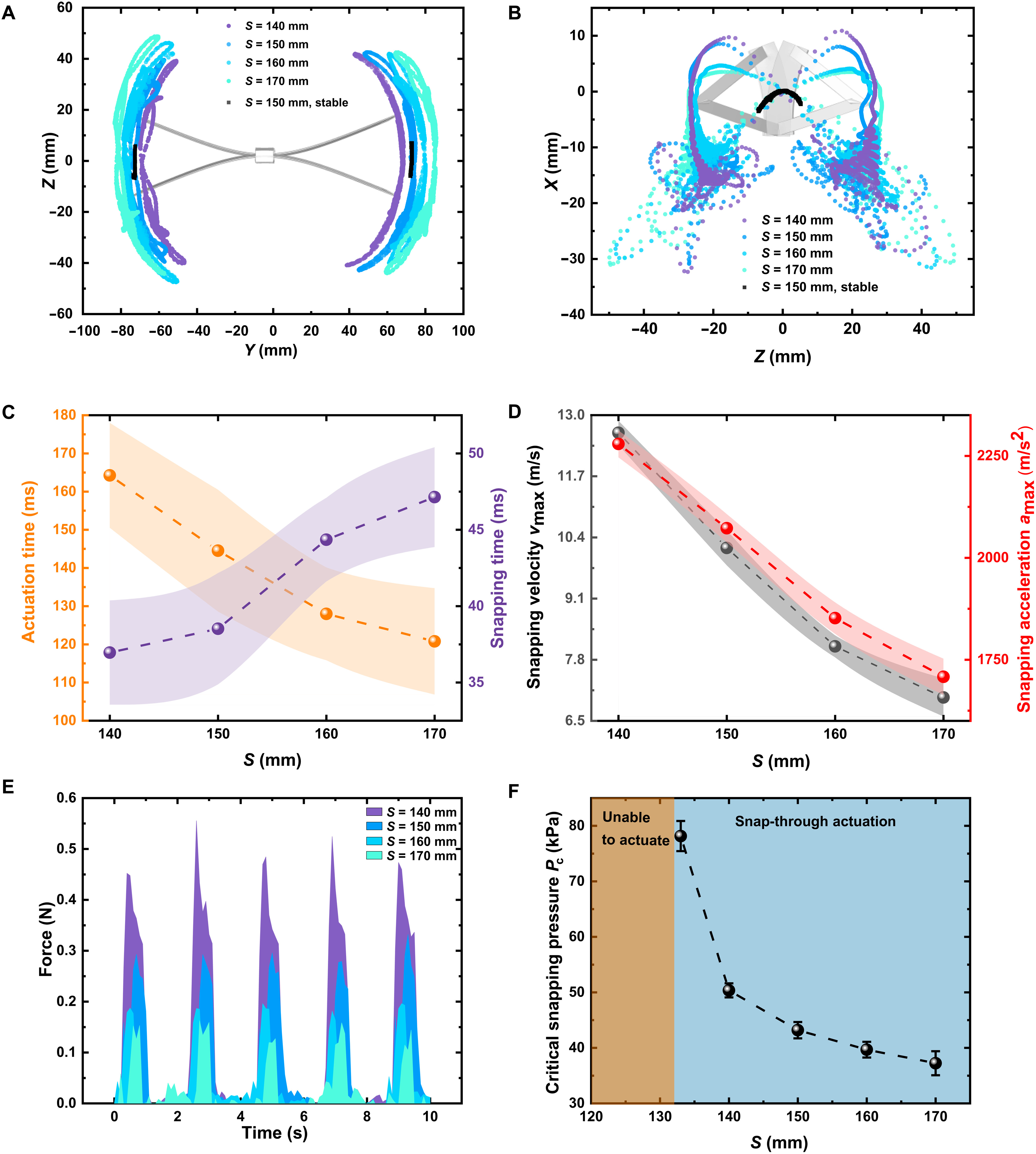
Далее необходимо было установить, как длина размаха крыльев может влиять на динамику. Графики 4A и 4B показывают траектории кончиков крыльев с размахом (S) от 140 до 170 мм. Давление срабатывания и частота оставались во время этого опыта прежними, т. е. 55 кПа и 0.714 Гц соответственно.
Вид спереди (плоскость YZ) показывает, что изгибные движения всех концов крыльев следуют аналогичной симметричной дугообразной траектории при движении вверх и вниз. Бистабильные крылья имеют большой угол взмаха (θwing) ~42°, что более чем в 16 раз больше, чем у стабильной системы (~2.8°) с уплощенными крыльями без напряжения, и более чем в 8 раз больше, чем мягкого робота-рыбы на основе стабильного машущего крыла с диэлектрическим приводом (~5°). Это указывает на явное преимущество бистабильного крыла перед стабильным.
Траектории на виде сбоку (плоскость XZ) показывают, что все бистабильные крылья следуют одинаковому профилю, напоминающему восьмерку. Напротив, их стабильный аналог показывает форму сегментарной дуги с малым углом (черная кривая на 4B).
Дополнительно было проверено, как длина размаха крыльев влияет на динамические характеристики и характеристики срабатывания бистабильных приводов взмаха, включая время хода и время щелчка (4C), скорость щелчка и скорость ускорения (4D), сила динамического блока (4E) и критическое давление срабатывания щелчка (4F). В совокупности анализ показал, чем короче размах крыльев, тем дольше время срабатывания и тем быстрее происходит щелчок, а чем выше скорость щелчка, скорость ускорения щелчка и динамическая блокирующая сила, которую он создает, тем более высокое критическое давление срабатывания требуется вызова щелчка.
На 4C показано, что при уменьшении S со 170 до 140 мм требуется большее время срабатывания tactn для достижения начала щелчка при том же количестве подводимой энергии, т.е. tactn увеличивается с ~120 до ~164 мс, что связано с более высокой жесткостью на изгиб и энергетическим барьером. Но сам щелчок срабатывает намного быстрее, а время tactn уменьшается с ~ 47 до ~ 37 мс. Это связано с более быстрым высвобождением энергии более высокой энергии деформации, хранящейся в более коротком размахе крыла S, где как скорость щелчка (vmax), так и ускорение (amax) увеличиваются с уменьшением S (4D). Например, когда S уменьшается со 170 до 140 мм, vmax увеличивается с ~7.0 до ~12.6 м/с, а amax увеличивается с ~2106 до ~2764 м/с2. Соответственно, пиковая динамическая блокирующая сила в значительной степени увеличивается более чем в три раза с ~ 0.15 Н при S = 170 мм до ~ 0.52 Н при S = 140 мм (4E).
При этом достигнутая увеличенная сила при более коротком S также требует более высокого критического пневматического давления срабатывания (Pc), чтобы вызвать щелчок путем преодоления барьера с более высокой энергией (4F). Когда S уменьшается ниже 140 мм, Pc резко возрастает с ~ 50 кПа при S = 140 мм до ~ 78 кПа при S = 132.5 мм. Эта длина также соответствует критической длине размаха крыла Sc для текущей конструкции, ниже которой пневматика не запускает щелчок даже при высоком давлении (более 120 кПа) из-за значительно повышенного энергетического барьера.
Практические опыты
Разобравшись с тем, при каких параметрах и как должна работать изучаемая конструкция, ученые приступили к практическим испытаниям, главным объектом которых стал мягкий робот-пловец.
Изображение №5
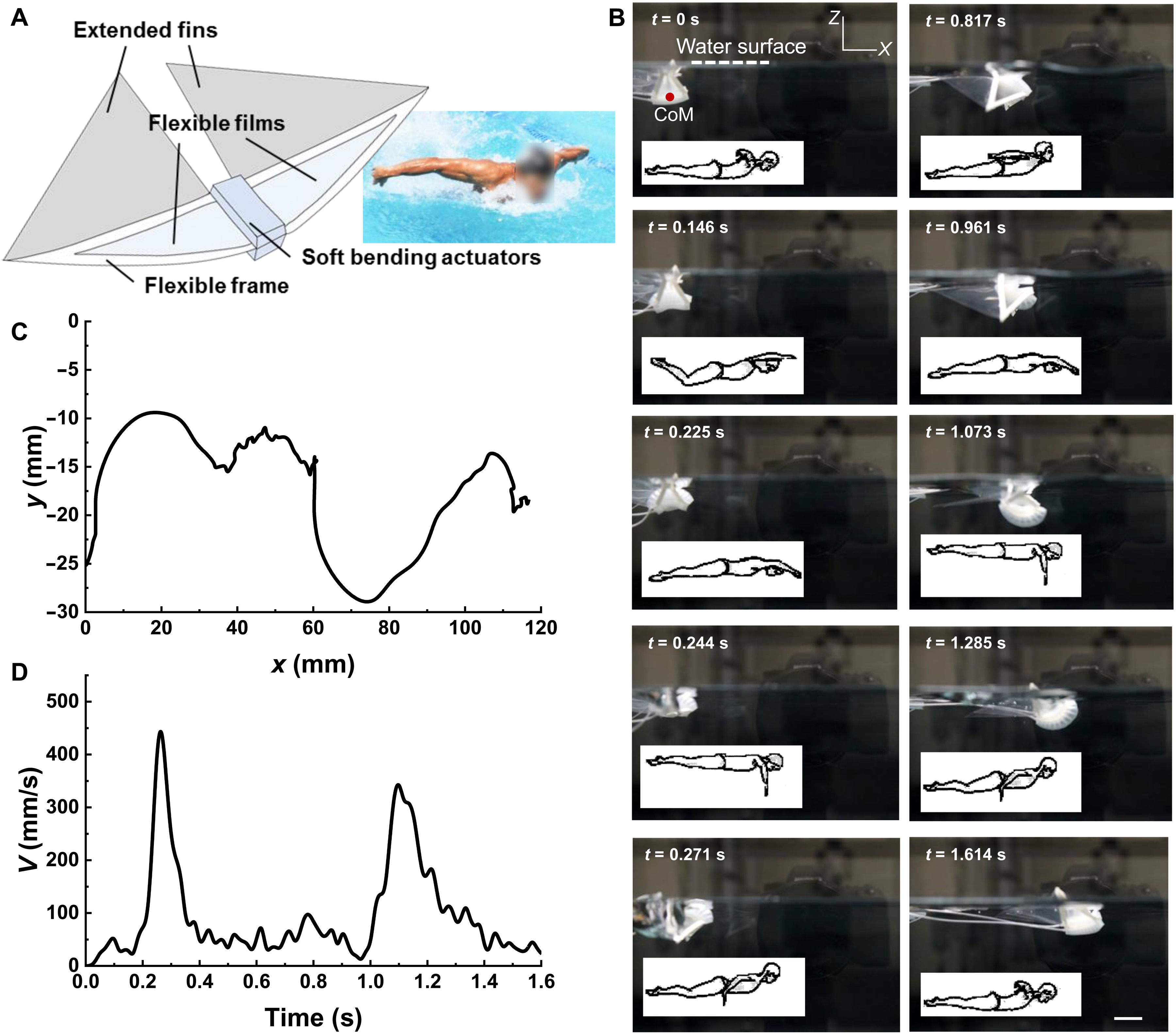
Схема на 5А показывает, что робот состоит из мягких приводов взмаха, покрытых гибкой мембраной, а также двух удлиненных плавников на основе гибкой пленки, прикрепленных к задним кромкам обоих крыльев для усиления движения. На 5B и видео №5 показан вид сбоку и его плавательные характеристики на границе раздела вода-воздух (S = 150 мм, давление срабатывания 55 кПа, частота 0.625 Гц).
Видео №5
В начальный момент времени t = 0 с робот полностью погружен в воду, за исключением направленных вверх кончиков крыльев, а его тело слегка наклонено. При надувании верхней пневмокамеры мягкий корпус начинает прогибаться вниз (выпуклая форма). Но робот пока еще не движется вперед. После начала щелчка при t = 0.225 с два крыла начинают одновременно взмахивать (движение вниз) и вращаться в течение короткой продолжительности щелчка около 46 мс (от t = 0.225 с до t = 0.271 с). В этот момент робот отталкивает воду вниз, поднимая тело ближе к поверхности воды (t = 0.271 с). Между тем, он создает вихри позади себя (видео №6) и толкает воду назад, чтобы создать силу тяги и продвигать себя вперед. В этот период времени корпус имеет наклонное положение с погружением головы в воду (t = 0.817 с).
Видео №6
При надувании нижней пневматической камеры для изгиба мягкого корпуса вверх (вогнутая форма) срабатывает щелчок обоих крыльев назад. Примечательно, что быстрый взмах вверх и вращательное движение крыльев заставляют корпус резко поднырнуть в воду (t = 1.073 с), толкая его вперед с всплывающей головой (t = 1.285 с).
Движения робота во время плавания сильно напоминали человека, плывущего в стиле баттерфляй (вставка на 5B). Во время баттерфляй тело человека совершает волнообразные движения головой, опережая движение гребка. Движения руками обеспечивают большую часть толчка для гребка. Также ведет себя и робот, сгибая тело и создавая волнообразный профиль, при этом его голова двигается вверх и вниз во время гребка (5C). Волнообразный профиль корпуса координируется с одновременными быстрыми взмахами обоих гибких крыльев. Кроме того, во время восстановительной фазы плавания баттерфляем движение крыльев вверх у робота также может обеспечивать силу тяги, толкающую его вперед. Отслеживание скоростей во время плавания робота показало, что щелчки ускоряют его (~ 0.45 м/с во время щелчка), а после щелчка скорость снижается до ~ 0.05 м/с (5D).
Изображение №6
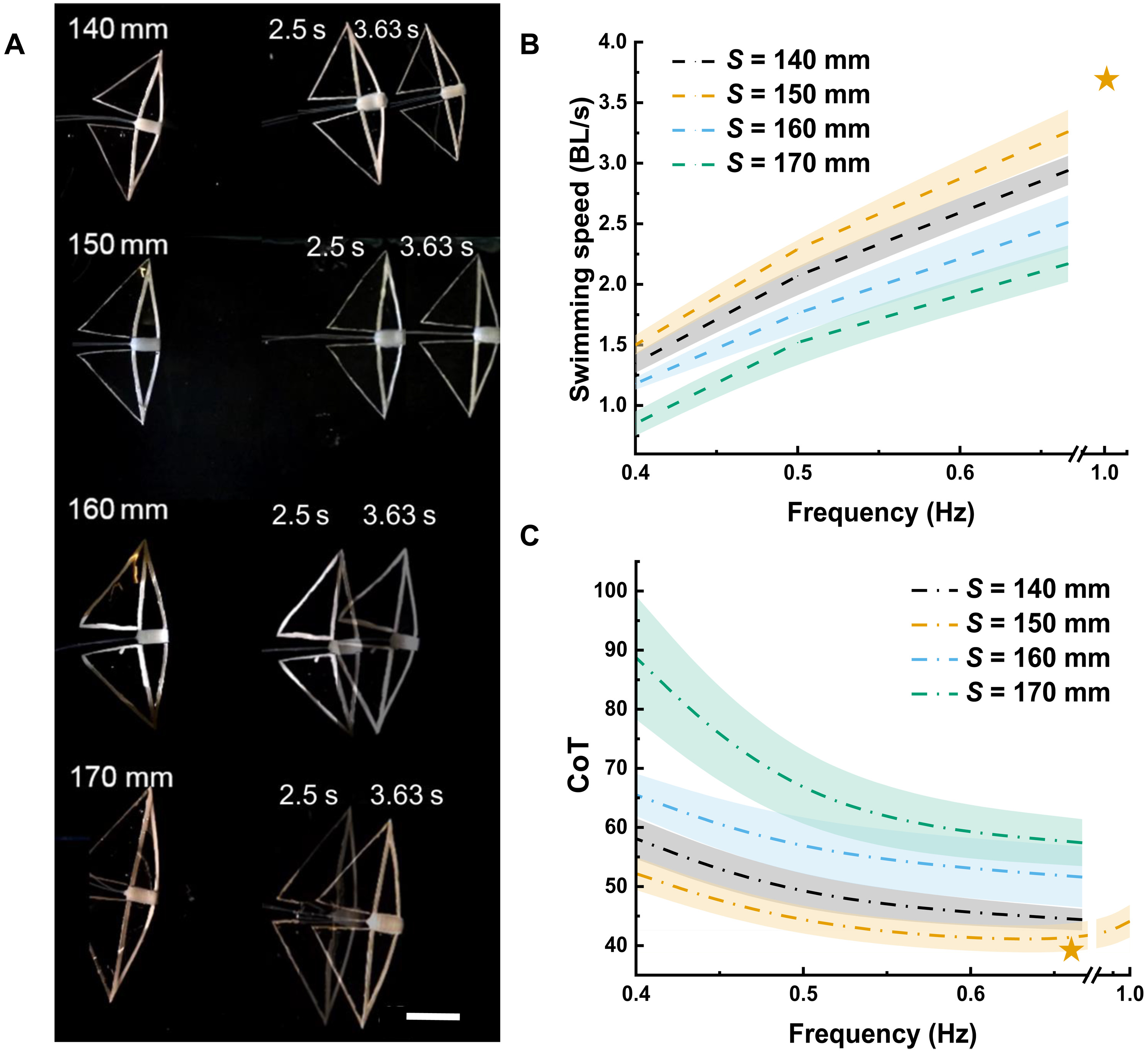
Затем ученые дополнительно исследовали влияние длины размаха крыльев (S) и частоты срабатывания (f) на плавательные характеристики робота (6A и 6B, видео №7) при одинаковом давлении в 55 кПа.
Видео №7
На 6A и в видео №7 показано сравнение плавательных характеристик роботов при изменении S от 140 до 170 мм, но при сохранении той же частоты (0.67 Гц). Сравнение показывает, что робот с S = 150 мм плывет быстрее при разных частотах срабатывания (6B). Объясняется это тем, что бистабильный робот-пловец с более коротким S имеет более высокую предварительно сохраненную энергию в своих предварительно изогнутых крыльях. Таким образом, как правило, он может генерировать более высокую гидродинамическую силу взмахов для движения при большем выделении энергии, вызванном щелчком. Однако более высокая сила взмахов компрометируется относительно более коротким размахом крыльев, что, следовательно, приводит к меньшей площади поверхности взаимодействия с жидкостями, а это снижает силу тяги и скорость плавания. Если же размах крыльев больше, то они имеют большую площадь поверхности взаимодействия, тогда как генерируют меньшую силу взмахов для движения из-за меньшей предварительно запасенной энергии. Другими словами, и слишком большой, и слишком малый размах крыльев будет приводить к одинаковому результату (хорошей, но не максимальной скорости), но по разным причинам. Потому промежуточное значение S в 150 мм оказалось самым подходящим для достижения высокой скорости.
Стоит также отметить, что, в отличие от быстрых бистабильных пловцов, их стационарный аналог (S = 150 мм) практически не может двигаться из-за гораздо меньших углов взмахов и поворотов (4A и 4B, видео №8).
Видео №8
После параметрических исследований был сделан вывод, что бистабильный мягкий робот с S = 150 мм, приводимый в действие при 55 кПа и 1 Гц, достигает скорости в 85.27 мм/с (видео №9), что соответствует 3.74 BL/с (длин тел в секунду).
Видео №9
Робот-пловец (S = 150 мм) также показал наименьшие значения CoT (cost of transport) (6C). CoT = E/(m × g × d) заключается в оценке энергозатрат на перемещение объекта на определенное расстояние, где E — энерговклад в систему, m — масса, g — стандартная сила тяжести, d — пройденное расстояние. Более низкий CoT указывает на более низкое потребление энергии.
Энергопотребление системы в основном поступает от электроэнергии для питания пневматического насоса (3 В и 0.12 А). На 6C показана зависимость между частотой срабатывания (f; удвоенная частота электропитания) и CoT для роботов-пловцов с различным значениями S. Для диапазона частот от 0.4 до 0.67 Гц значение CoT уменьшается с увеличением f для различных S. Самое малое значение CoT было, как уже говорилось ранее, у робота с S = 150 мм. Однако при дальнейшем увеличении f до 1 Гц его CoT также немного увеличивается, показывая U-образную кривую (6C). Самый низкий CoT ~39 достигается при f ~ 0.67 Гц и скоростью в 3.4 BL/s.

Изображение №7
Далее ученые сравнили плавательные характеристики самого быстрого робота-пловца (S = 150 мм) с известными быстро плавающими мягкими роботами и несколькими биологическими видами. Все объекты сравнения обладали схожей техникой плавания. При этом они были разделены на категории на диаграмме относительной скорости (длина тела в секунду) в зависимости от массы тела (7А). Ученые также отмечают, что роботы-пловцы, чья скорость больше 1 BL/s, не попали в сравнение, так как их метод передвижения отличался от изучаемого (это были водометы, пропеллеры и т. д.).
Самым быстрым мягким роботом со скоростью 0.78 BL/s считался робот-рыба, использующий колебательные движения тела. Однако исследуемый робот-пловец с крыльями (плавниками, если угодно) достигал скорости 3.74 BL/s, что в 4.8 раза быстрее. При этом у робота-рыбы давление срабатывания было значительно выше (160 кПа против 55 кПа), как и масса тела (51 г против 2.8 г).
Сравнение с биологическими видами показало, что робот-пловец с машущими крыльями может посоревноваться в скорости с мантами (~1.73 BL/s), дельфинами (~3.28 BL/s) и пингвинами Гумбольдта (~4.50 BL/s).
На 7В дополнительно показана эффективность движения роботов-пловцов с машущими крыльями в рамках St в зависимости от частоты срабатывания (f). Было установлено, что, за исключением случая S = 170 мм, приводимого в действие с частотой 0,4 Гц, St всех исследованных роботов попадает в диапазон 0.2 < St < 0.4, присущий биологическим видам. Это говорит о том, что исследуемый робот может не только развивать большую скорость, но и достигать максимальной эффективности движения. Такая же картина наблюдалась и при сравнении оптимальных углов сгибания крыльев (плавников). В этом случае робот-пловец также попадает в диапазон от ~15° до ~40°, наблюдаемый у биологических видов (7C).
Изображение №8
Ученые отмечают, что, несмотря на продемонстрированные роботом-пловцом скорость и эффективность, он может достичь только однонаправленного плавания вперед. Чтобы устранить это ограничение, ученые дополнительно разработали маневренного робота с машущими крыльями, способного поворачиваться в нужном направлении.
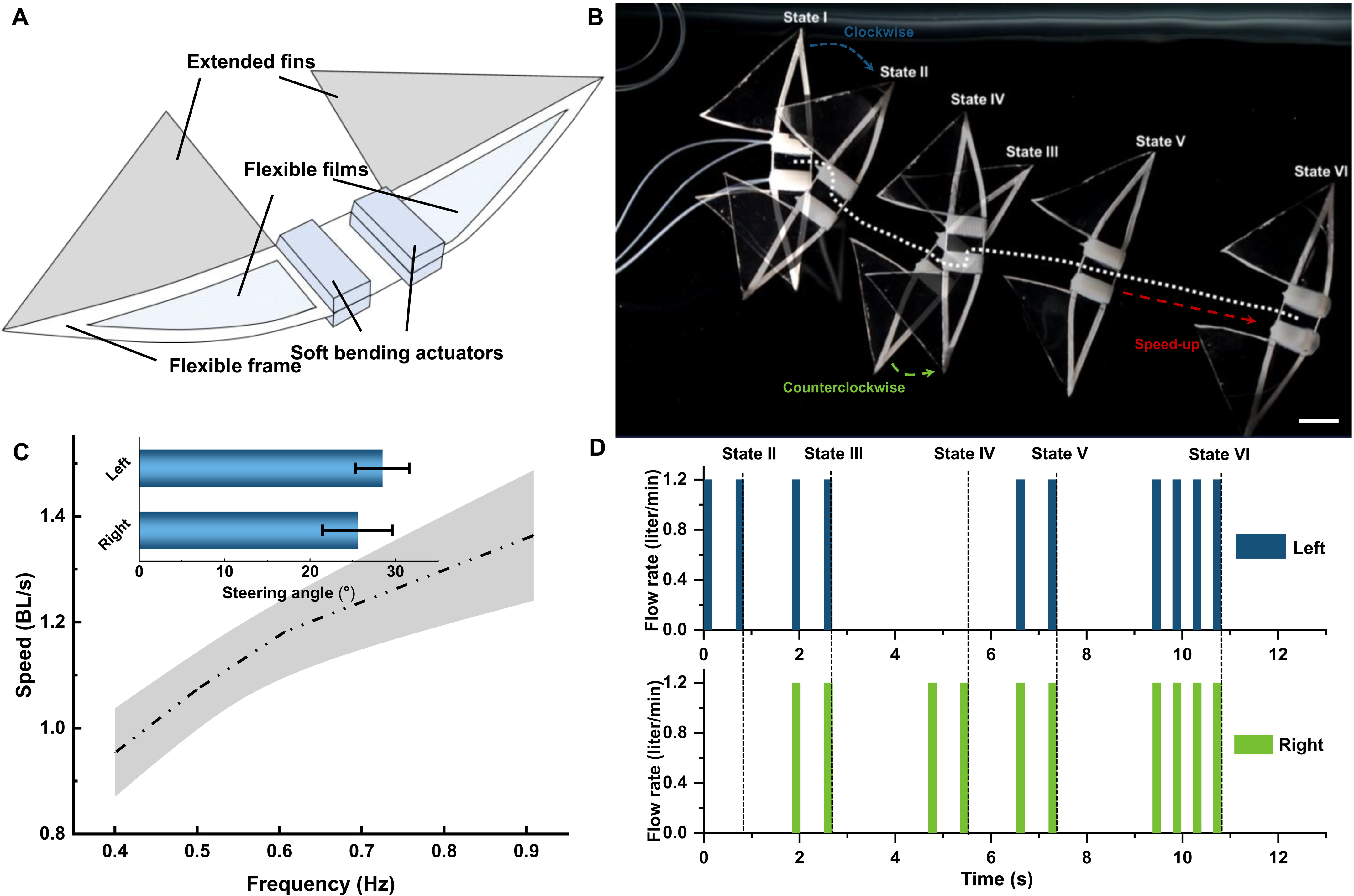
Как показано на 1С и 8А, как и его бистабильный аналог, маневренный вариант состоит из мультистабильного привода взмахов с двумя мягкими пневматическими приводами изгиба, соединенными параллельно посередине. Два бистабильных крыла с обернутыми тонкими пленками и удлиненными гибкими стабилизаторами могут взмахивать независимо друг от друга при однократном срабатывании для поворота или одновременно при двойном срабатывании для движения вперед (8B–8D). На 8B показана траектория движения робота (видео №10). Соответствующая ей последовательность объемного расхода пневматики показана на 8D, где импульсная амплитуда и время расхода поддерживаются на уровне 1.2 л/мин и 0.172 с соответственно.
Видео №10
Мультистабильный мягкий робот-пловец может генерировать относительно большой угол поворота ~ 25.5°/28.5° (по/против часовой стрелки) за взмах в течение 172 мс (вставка на 8C), что соответствует высокой скорости поворота в ~157°/с. В дополнение к настраиваемому направлению плавания, аналогичным образом, его скоростью также можно управлять и увеличивать, повышая частоту срабатывания с 0.54 (состояния iv до v) до 0.72 Гц (состояния v до vi). График 8C показывает, что скорость движения робота линейно увеличивается с частотой срабатывания и может достигать ~ 1.4 BL/с при 0.9 Гц. Снижения скорости по сравнению с таковой у бистабильного робота связана с увеличением массы и изменением конструкции. Тем не менее мультистабильный робот-пловец все равно демонстрирует отличную скорость и эффективность движения.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
В рассмотренном нами сегодня труде ученые продемонстрировали свое творение — робота-пловца, оснащенного машущими крыльями. Движения этого робота сильно напоминают стиль плавания баттерфляй, который на самом деле весьма распространен в дикой природе.
Помимо природы и олимпийских пловцов, у авторов разработки был еще один источник вдохновения — заколка для волос. Если природа подтолкнула ученых к изучению плавания с применением взмахов, то заколка подарила идею о том, какой формы должна быть конструкция.
Робот-пловец является бистабильной системой, т. е. системой с двумя стабильными состояниями. Человек может контролировать переключение между ними посредством нагнетания воздуха в одну из пневматических камер, встроенных в конструкцию робота. По мере того как эти камеры надуваются и сдуваются, корпус робота изгибается вверх и вниз, заставляя крылья двигаться вперед и назад вместе с ним.
Предыдущие разработки роботов-пловцов часто были сосредоточены на использовании какого-то двигателя для подачи энергии непосредственно на крылья. В этом же мягком роботе роль двигателя исполняет сам корпус. Во время перехода от одного состояния в другое происходит щелчок, который и приводит в движения крылья.
Созданный робот смог достичь скорости в 85.27 мм/с, что является лучшим результатом среди мягких плавающих роботов. На самом деле эти показатели столь высоки, что робот-пловец смог бы даже посоревноваться с некоторыми биологическими видами.
Вопрос маневренности робота, который изначально мог плыть только в одном направлении, был решен посредством преобразования его бистабильного корпуса в мультистабильный. Вместо двух приводов было использовано четыре, которые были соединены в центре. Таким образом можно было управлять как отдельным крылом (для поворотов), так и обоими крыльями (для движения вперед).
Несмотря на отличные результаты, ученым предстоит еще немало работы. Одной из основных проблем является отсутствие автономности робота-пловца. Пневматика робота активируется за счет подачи воздуха через трубки, что сильно ограничивает его движения. В будущем ученые намерены усовершенствовать свое творения, дабы оно могло самостоятельно регулировать пневматику без привязки к «заправочной» станции.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


