Статья №1. “Зарождение проекта. Часть 1.1. Как я собирал робота телеприсутствия на колесной базе.”
К 2015г членам нашей будущей команды удалось заработать достаточно денег, чтобы рисковать своим временем в долгосрочной перспективе (определили горизонт планирования 1 год). И мы решили организовать стартап. Заниматься куплей-продажей? Нееееет, технологичный стартап! А именно, разработка роботов и твердотельных лазеров мощностью порядка 1-10 Вт.
Идея присутствия в нужное время в интересном месте за тысячи километров мне сразу понравилась и нравится до сих пор! Все мы любим онлайн-трансляции. А благодаря роботу я к тому же сам управляю направлением своего взгляда, своим местонахождением. Поэтому в 2015 году когда мы начали проект Endurance Robots, я взялся за разработку робота телеприсутствия на колесах. Колесная база позволит передвигаться по помещению или на улице, а телеприсутствие обеспечит актуальность происходящей вокруг ситуации. Конечная цель: полная виртуальная реальность, робот, управляемый человеком с помощью очков Oculus rift! Огонь!))
Для начала я погуглил и изучил имеющиеся на международном рынке предложения: PadBot (Китай), BotEyes (Россия), Double Robotics (США), Webot (Россия), OrigiBot (США), Oculus (Канада), Anybot (США), RBOT Synergy (Россия), и составил таблицу сравнительных характеристик роботов. Роботы отличались по своему функционалу: умение брать предметы манипулятором (банку пива из холодильника:), преодолевать высокие препятствия, автономно заряжаться и др. Естественно, ценник плавал и находился в диапазоне от $1000 до $10000. Впоследствии я понял, что недорогие устройства до $5000 являются роботизированными платформами, управляемыми человеком-оператором, но никак не автономными роботами, способными самостоятельно принимать решения в меняющейся обстановке: приближение препятствия, проезд по маршруту из пункта А в пункт В, распознавание речевых команд. Наша команда Endurance Robots решила войти на рынок платформ эконом класса до $2000. Исходя из таблицы сравнительных характеристик я определил характеристики устройства, которые нужно достичь в первую очередь, а именно: время автономной работы (от 8 часов, целый рабочий день), преодоление препятствий (высотой до 3,5 сантиметров, порог входной двери), надежная передача команд управления через сеть Интернет, качественная видео- и аудиосвязь. Один участник проекта настаивал сделать корпус робота из женского манекена и установить планшет между грудей. Мы даже купили б/у торс без рук, ног и головы за $2 (полноценный новый манекен стоит ~$100), но из-за ограниченного бюджета эта идея в итоге умерла.

В ходе тестирования спроса стало однозначно понятно, что люди ищут не просто планшет на колесах, но, скорее, роботизированную платформу, которая способна выполнять интеллектуальные задачи человека: распознавать объекты и речь (open source технология OpenCV), грамотно ответить на вопросы (ИИ), преодолеть маршрут до предмета, захватить предмет и перевести в место назначения. То есть колесная база – это не главное, но нужное дополнение к тому, что мы предлагаем. Стратегически колесная база остается главным форм фактором (form factor). По аналогии ноутбук -> планшет. Т.е. новая форма – это новый продукт.

Задача на первом этапе — разработать колесную базу: недорогую (не дороже $200 для мелкосерийного производства), эффективную (которая бы надежно двигалась, имела бы модульность и возможность быстрого ремонта), простую (на подобии того, что телефон поставил, приложение скачал и система работает), надежную (software, hardware), которую в дальнейшем можно будет усовершенствовать. Оператор должен быть способен подавать сигналы на электромоторы и сервоприводы через сеть интернет.
Итак, БАЗОВЫЕ ПРИНЦИПЫ конструкции.
— Универсальность платформы а-ля «вездеход» не преследуется. Модель окружающей среды = внутри помещения. Поверхность ровная, (ламинат, плитка, дерево, бетон, линолеум), препятствия до 1 см.
— Приоритет в следующей последовательности: привлекательность, эргономичность и простота, мобильность.
— Создание прототипа, смоделированного под промышленное производство.
— Надежность в ежедневной эксплуатации (1 год)
— Заменяемость или дополняемость (поставить второй динамик или вторую камеру есть куда).
— Универсальность крепежей.
— Прямолинейное движение, а не зигзагами.
— Шум и вибрация менее 10 ДцБ.
— Разборность и легкость конструкции для переноса из одного здания в другое.

ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ конструкции.
— Максимальная скорость до 3 км/ч.
— Высота расположения верхнего края экрана ~1.5 м. (желательно, с возможностью изменения с 1.2 м до 1.8 м).
— Сколько кг на высоте 180 см? Планшет+кредл+два сервопривода. Будет ли устойчива трехколесная конструкция с выбранными АКБ вдоль бортов при наезде на препятствие 3.5 см одним колесом или двумя колесами?
И тут повалился миллион вопросов… Какого размера колеса? Из какого материала?

Какого типа: омни, гладкие, с глубоким протектором?
Сколько колес: три или четыре? Как насадить на вал?

На вал редуктора или мотора?

Какой мотор выбрать: коллекторный, бесколлекторный, шаговый? Из какого материала изготовить раму? В итоге я сделал первый прототип из легкодоступных материалов, продающихся в любом строительном магазине: 3 колеса (два ведущих и одно поворотное), рама из тонкого алюминиевого П-образного профиля, саморезы и болты, 2 шаговых мотора.

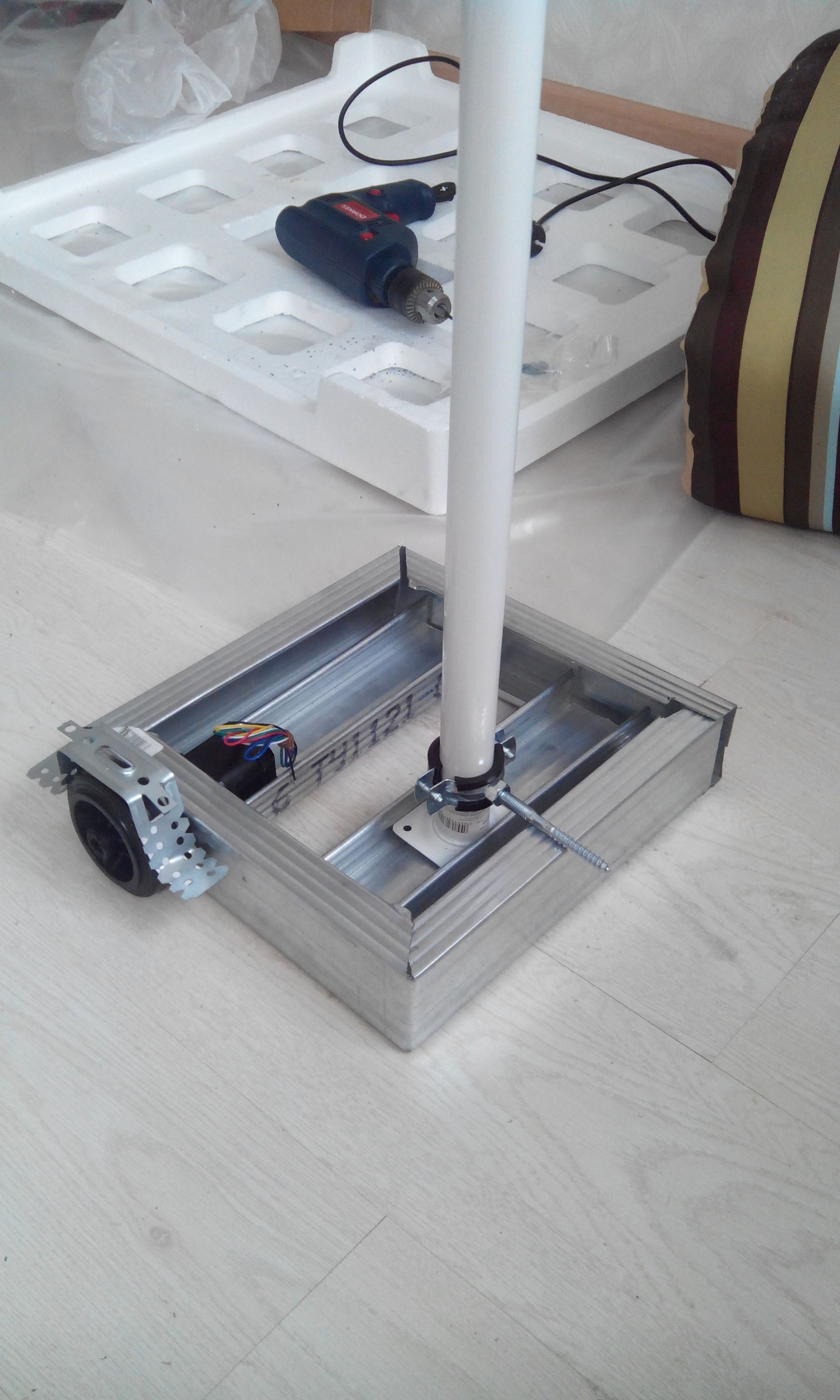
Главное, этот прототип выполнял свое предназначение: служить нашему схемотехнику Андрею для тестирования электроники вдоль и поперек.
В этой статье я описал самое начало нашего длинного пути. Изделия и фотографии любительские. Но в следующих частях я покажу более профессиональный подход:

Схема расположения элементов механики и электроники, на которую мы ориентировались: