
1 Теория о методах доступа к USB
1.1 Windows
Когда новое, доселе неизвестное системе USB-устройство впервые вставлено в ЭВМ, работающую под управлением Windows, оно отображается в диспетчере устройств с жёлтым знаком вопроса. Это связано с тем, что Windows обязательно нужен драйвер для работы с ним. Давайте я немного порассуждаю про эти драйверы, но не с научной точки зрения, а как инженер, раскрыв чисто практические аспекты, но несколько упростив теорию. Потому что мне не нужно, чтобы все уснули. Мне нужно, чтобы суть была понятна, так что ряд скучных деталей придётся опустить.
1.1.1 Драйверы, работающие на функциональном уровне
Что такое USB-устройство? Это набор конечных точек. Но прикладному программисту, если честно, эти точки не интересны. Давным-давно, ещё в прошлом тысячелетии, когда последовательные порты делались на микросхеме UART16550, под неё был сделан функциональный драйвер для Windows, и все прикладные программисты привыкли работать с абстракциями именно этого драйвера. И с этой привычкой трудно спорить. Представим на минутку, что с переходником USB-COM придётся работать в USB-шном стиле, на уровне конечных точек. Есть идеология CDC: две конечных точки туда-обратно, одна точка статуса в режиме прерываний и определённый набор команд, подаваемых через конечную точку EP0. Это всё описано в стандартах, относящихся к USB.
Всё? Нет, некоторым этого мало! Prolific сделала свой набор команд для точки EP0, не совместимый с CDC. А FTDI – свой. Он не совместим ни с CDC, ни с Prolific. Так что, если бы прикладной программист работал бы с переходниками USB-COM на уровне конечных точек, ему пришлось бы нелегко. К счастью, Prolific и FTDI предоставляют функциональные драйверы для своих чипов, а для CDC функциональный драйвер разработала сама Microsoft и прилагает его в составе Windows. Поэтому прикладной программист понятия не имеет, как работать с конкретным переходником (помню, мы целый NDA лет 15 назад с FTDI подписывали, чтобы получить от них руководство по их командам, причём я сразу же им послал информацию об ошибке в документе, так как пока работали бюрократы, я через дизассемблер всё сам уже успел изучить, так что сразу нашёл несовпадение их описания с моим). На прикладном уровне драйверы всех упомянутых производителей дают интерфейс такой же, как и при работе со старым добрым UART16550.
То же касается и USB-накопителей. Мало кто знает, что физически там две конечных точки. Почти никому не интересно, как там надо гонять пакеты, чтобы посылать команды и данные. Как разруливать ошибки, знает ещё меньше людей. Все работают через драйвер usbstor.sys, предоставляемый Microsoft, который обеспечивает работу точно так же, как и с дисками, подключёнными через локальную шину материнской платы.
Удобно? Однозначно! Но вот мы сделали своё устройство, не совместимое по логике работы ни с каким из стандартных. И что нам теперь, всенепременно писать для него персональный драйвер?
Не обязательно. Если нас устраивает работа на прикладном уровне через конечные точки, то уже имеется целый ряд готовых драйверов, которые позволяют общаться с устройством через них. Некоторые из них мы сейчас и рассмотрим.
1.1.2 CyUSB
С этим драйвером я познакомился раньше других. Было это 12 лет назад. Вот с него и начну рассказ. Правда, скажу лишь вскользь. Фирма Cypress, выпуская замечательные контроллеры FX2LP, просто обязана была сделать драйвер, работающий на уровне конечных точек, чтобы облегчить жизнь своим клиентам. И она его сделала. Кому интересно – ищите по слову CyAPI. Это DLL-ка, предоставляющая ряд функций для прикладного программиста. Я как системщик старался обойтись без DLL, поэтому сделал себе библиотеку, работающую с драйвером на уровне IOCTL запросов.
Главный недостаток данной библиотеки заключается в её лицензионном соглашении. Её можно использовать только с контроллерами Cypress. А чтобы всё было убедительнее, начиная с некоторых версий, драйвер стал просто зависать, если он работает с контроллерами других производителей. По крайней мере, старые версии с AT90USB работали, а более свежие – нет. Поэтому я решил, что не буду пользоваться данным драйвером. Даже написал свой… Но вскоре обнаружился замечательный готовый вариант от Microsoft, и я перешёл на него.
1.1.3 WinUSB
Этот драйвер уходит своими корнями в инфраструктуру UMDF. Когда фирма Microsoft работала над возможностью запускать драйверы на пользовательском уровне защиты, они сделали специальный драйвер-прослойку WinUSB. Но через этот же драйвер можно работать и из обычных прикладных программ, а не только из UMDF-драйверов. Кому интересно – вбейте в поиск WinUSB API. Через эту функциональность можно делать то же самое, что и через CyUSB, но с контроллерами любых производителей.
Сам драйвер входит в состав Windows, поэтому в Win7 его можно было вообще ставить без каких-либо проблем с подписыванием. Можно было создать по инструкции от Microsoft или найти и скачать готовый inf файл, поменять в нём VID/PID на свои и установить. К сожалению, начиная с WIN8, обязательно надо подписывать не только сам драйвер, но и INF файл. Однако никто не мешает поправить VID/PID у устройства на тот, который будет найден. Вот у меня есть вот такой подписанный inf файл.
;
; Android WinUsb driver installation.
;
[Version]
Signature = "$Windows NT$"
Class = AndroidUsbDeviceClass
ClassGuid = {3F966BD9-FA04-4ec5-991C-D326973B5128}
Provider = %ProviderName%
DriverVer = 06/06/2017,2.0.0010.00003
CatalogFile.NTx86 = MT16_x86.cat
CatalogFile.NTamd64 = MT16_x64.cat
;
; This section seems to be required for WinUsb driver installation.
; If this section is removed the installer will report an error
; "Required section not found in INF file".
;
[ClassInstall32]
Addreg = AndroidWinUsbClassReg
[AndroidWinUsbClassReg]
HKR,,,0,%ClassName%
HKR,,Icon,,"-26"
[Manufacturer]
%ProviderName% = Google, NTx86, NTamd64
[Google.NTx86]
%CompositeAdbInterface1% = USB_Install, USBVID_1234&PID_0001
%CompositeAdbInterface2% = USB_Install, USBVID_1234&PID_0002
%CompositeAdbInterface3% = USB_Install, USBVID_1234&PID_0003
%CompositeAdbInterface5% = USB_Install, USBVID_1234&PID_0005
%OldBox% = USB_Install, USBVID_4844&PID_8816
%HIDkey% = USB_Install, USBVID_A1A2&PID_2001
[Google.NTamd64]
%CompositeAdbInterface1% = USB_Install, USBVID_1234&PID_0001
%CompositeAdbInterface2% = USB_Install, USBVID_1234&PID_0002
%CompositeAdbInterface3% = USB_Install, USBVID_1234&PID_0003
%CompositeAdbInterface5% = USB_Install, USBVID_1234&PID_0005
%OldBox% = USB_Install, USBVID_4844&PID_8816
%HIDkey% = USB_Install, USBVID_A1A2&PID_2001
[USB_Install]
Include = winusb.inf
Needs = WINUSB.NT
[USB_Install.Services]
Include = winusb.inf
AddService = WinUSB,0x00000002,WinUSB_ServiceInstall
[WinUSB_ServiceInstall]
DisplayName = %WinUSB_SvcDesc%
ServiceType = 1
StartType = 3
ErrorControl = 1
ServiceBinary = %12%WinUSB.sys
[USB_Install.Wdf]
KmdfService = WINUSB, WinUSB_Install
[WinUSB_Install]
KmdfLibraryVersion = 1.7
[USB_Install.HW]
AddReg = Dev_AddReg
[Dev_AddReg]
HKR,,DeviceInterfaceGUIDs,0x10000,"{F72FE0D4-CBCB-407d-8814-9ED673D0DD6B}"
[USB_Install.CoInstallers]
AddReg = CoInstallers_AddReg
CopyFiles = CoInstallers_CopyFiles
[CoInstallers_AddReg]
HKR,,CoInstallers32,0x00010000,"WdfCoInstaller01009.dll,WdfCoInstaller","WinUSBCoInstaller2.dll"
[CoInstallers_CopyFiles]
WinUSBCoInstaller2.dll
WdfCoInstaller01009.dll
[DestinationDirs]
CoInstallers_CopyFiles=11
[SourceDisksNames]
1 = %DISK_NAME%,,,i386
2 = %DISK_NAME%,,,amd64
[SourceDisksFiles.x86]
WinUSBCoInstaller2.dll = 1
WdfCoInstaller01009.dll = 1
[SourceDisksFiles.amd64]
WinUSBCoInstaller2.dll = 2
WdfCoInstaller01009.dll = 2
[Strings]
ProviderName = "GM Software"
CompositeAdbInterface1 = "MT16 Device"
CompositeAdbInterface2 = "MT16 Ports 1-5"
CompositeAdbInterface3 = "MT16 Ports 12-16"
CompositeAdbInterface5 = "TBR Flasher"
OldBox = "Old MT16 Box"
HIDkey = "HID Dongle via WinUSB"
WinUSB_SvcDesc = "MT16 COM Ports"
DISK_NAME = "MT16 Driver Installation Directory"
ClassName = "MT16 USB Devices"
Раньше таких inf файлов на просторах сети было много. Андроид-телефоны через них подключались. Сейчас надо искать по слову WinUSB.sys внутри. Ну, или «ServiceBinary = %12%WinUSB.sys».
Я поправил «Прошивку» для FX3 вот так:

const uint8_t CyFxUSB30DeviceDscr[] __attribute__ ((aligned (32))) =
{
0x12, /* Descriptor size */
CY_U3P_USB_DEVICE_DESCR, /* Device descriptor type */
0x00,0x03, /* USB 3.0 */
0x00, /* Device class */
0x00, /* Device sub-class */
0x00, /* Device protocol */
0x09, /* Maxpacket size for EP0 : 2^9 */
#ifdef CY_VID_PID
0xB4,0x04, /* Vendor ID */
0xF1,0x00, /* Product ID */
#else
0x34,0x12, /* Vendor ID */
0x05,0x00, /* Product ID */
#endif
…
И теперь могу собирать варианты хоть под CyUSB, хоть под WinUSB с привязкой к имеющемуся у меня inf файлу. А так — можно перевести ОС в режим, не требующий подписывания драйверов, хоть это и не очень удобно.
1.1.4 Библиотека libusb
Вариант с WinUSB отличный, но не кроссплатформенный. Насколько мне известно, под Linux нет точно такого же API, который предоставляет Microsoft для Windows. Кроссплатформенный вариант – это использование библиотеки libusb. Причём под Windows эта библиотека по умолчанию опирается на всё тот же драйвер WinUSB. Нашли драйвер, накатили его на устройство. Скачали библиотеку, начали через неё работать с этим драйвером. Надо будет – через неё же можно будет работать и под Linux. Замечательно? Да. Особенно если мы разработали полностью своё устройство. Но, увы, я просто обязан указать недостаток данного метода для общего случая.
Когда мы устанавливаем на устройство драйвер WinUSB, мы убираем оригинальный драйвер. В рамках данного блока статей мы теряем возможность общаться с нашим устройством при помощи утилиты ControlCenter. Ну, и я не упоминал в статьях про утилиту Streamer, позволяющую измерять скорость устройства… В общем, ею мы тоже не сможем пользоваться, если заменим штатный драйвер на WinUSB.
В рамках другой задачи мне надо было экспериментировать с аудиоустройствами из своего приложения. При этом я не хотел постигать все тонкости работы с ними. Я хотел только некоторые команды подавать, а чтобы всё остальное за меня делала сама операционка. Но если бы я посадил устройства на WinUSB, ОС бы потеряла контроль над ними и не могла бы оказывать мне всемерное содействие.
Можно ли работать из прикладной программы с устройствами, не пересаживая их на специальный драйвер? В принципе, да (правда, это очень аккуратное утверждение). Давайте я покажу этот метод… Правда, в конце — сильно раскритикую его.
1.1.5 Драйвер UsbDk
Библиотека libusb существует в двух версиях. Версия 0.1 и версия 1.0. Обе версии в настоящее время развиваются, создавая некоторую путаницу. И вот версия 1.0 может работать не только через драйвер WinUSB, но и через драйвер UsbDk. Последний является фильтр-драйвером. Что такое фильтр-драйверы? Вспоминаем детство, сказку о царе Салтане:

Собственно, фильтр-драйвер встаёт на пути IRP-пакетов от прикладной программы к основному драйверу и обратно. IRP — это гонцы, которые бегают туда-сюда. А фильтр-драйвер может их пропустить, не изменяя, а может подменить их содержимое. Он придуман для исправления ошибок, чтобы не менять основной драйвер, а просто немножко подправить пакеты, дабы те не вызывали проблем. Их можно править на прямом и на обратном пути. Но в целом, никто не мешает через этот фильтр-драйвер запустить в основной драйвер запросы от приложения, которое общается именно с фильтром. И UsbDk этим и занимается.
Очень схематично, опустив ряд неважных подробностей, это можно показать так:
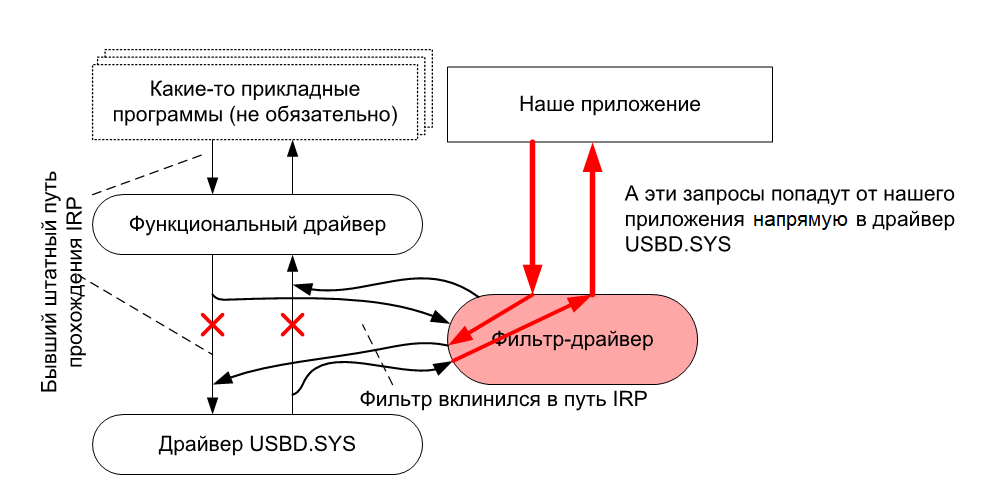
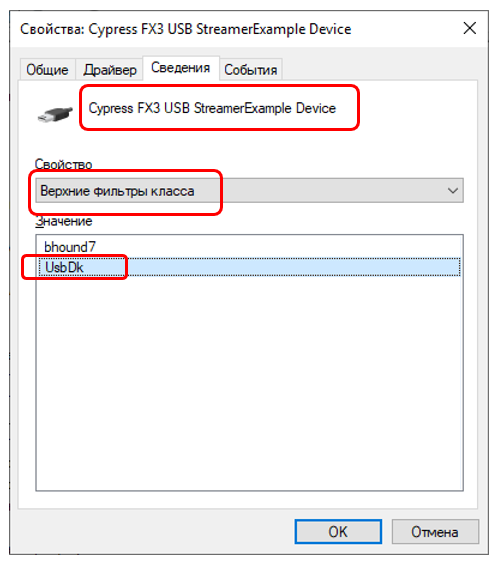
Вот тут мы видим, что фильтр-драйвер UsbDK подсел на пути пакетов к нашему устройству (на самом деле, он подсел на пути ко всем USB-устройствам, так как прицепился к драйверу класса USB):
Если при открытии библиотеки libusb 1.0 сказать:
libusb_init(&m_ctx);
libusb_set_option(m_ctx, LIBUSB_OPTION_USE_USBDK);
то она будет использовать в качестве основы не WinUSB, а UsbDk. Ура? Не совсем. Приведу минимум две проблемы, создаваемые при использовании данного пути.
Первая проблема организационная. Если мы запустили программу, поработали, вышли, то всё будет хорошо. Но вот мы запустили программу, начали работать, а потом почему-то прервались. Да хоть у меня стояла точка останова, исполнение прервалось, я осмотрел переменные, увидел, что программа работает неверно, и завершил её. Могу я так сделать? Дело-то житейское при разработке программы. Или просто зациклилась она. В общем, мы её прервали. Снова запускаем – устройство уже не открывается. Смотрим код ошибки – он очень интересный.
Driver file operation error. DeviceIoControl failed (Cannot create a file when that file already exists. Error code = 183)
Cannot Open USB Device
И всё. Выдёргивать-вставлять USB-кабель – бесполезно. Только полная перезагрузка Windows спасёт Отца Русской Демократии. Когда перезапускаешься третий-четвёртый раз за час – это начинает несколько раздражать. Поиск в сети не дал никаких результатов. Попытка бегло осмотреть исходники UsbDk – тоже, а на детальные разбирательства нет времени. Может, кто в комментариях чего подскажет…
Но на самом деле, эта проблема раздражает, но не является фатальной. Вторая проблема более серьёзная. Вот я поставил VirtualBox. Я просто запустил виртуальную машину и хочу подключить к ней, скажем, бластер. И что получаю?
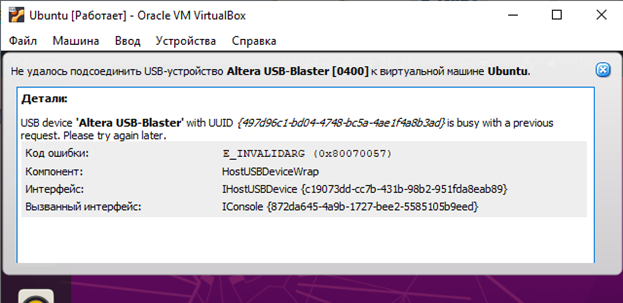
Аналогично – любое другое устройство.
Поиск по сети даёт много вариантов типа: «У меня всё заработало после того, как я потёр заячьей лапкой по бубну из кожи тушканчика, спрыснутому кровью семидесятидвухлетней девственницы, полученной…» … Что там дальше в рецепте — сейчас уже не помню… Тем более, мне он не помог… Более осмысленные рекомендации требуют сносить фильтр-драйверы USB, пока не полегчает. Проблема уходит, когда сносишь именно UsbDK. Ну, значится, так тому и быть. Хотя для экспериментов с аудио, других приемлемых вариантов я не нашёл. Так что драйвер я снёс, но дистрибутив – оставил. Пригодится. Именно поэтому описываю эту методику. Ну, и вдруг кто в комментариях подскажет, как обходить эти две проблемы. Тогда станет совсем здорово.
1.1.6 Итого
Итого, сегодня мы будем работать через библиотеку libusb, посадив устройство на драйвер WinUSB. Да, мы потеряем возможность работать с устройством через стандартные приложения от Cypress. Зато всё будет стабильно и хорошо.
1.2 Linux
1.2.1 Драйвер
Я уже много раз писал, что не очень сильно разбираюсь в уходе за пингвинами, поэтому просто перескажу слова своего начальника, опрошенного специально для написания данной статьи.
Некоторые устройства уже поддержаны в Линуксе по классу, либо по VID/PID. Вот, скажем, я подключил макетную плату ICE40 с ПЛИС Latice и подал сначала команду lsusb, чтобы увидеть USB устройства, а затем – уже полюбившуюся нам по прошлым статьям команду:
ls –l /dev/serial/by-path
чтобы увидеть, что мост фирмы FTDI сам прикинулся двумя последовательными портами.
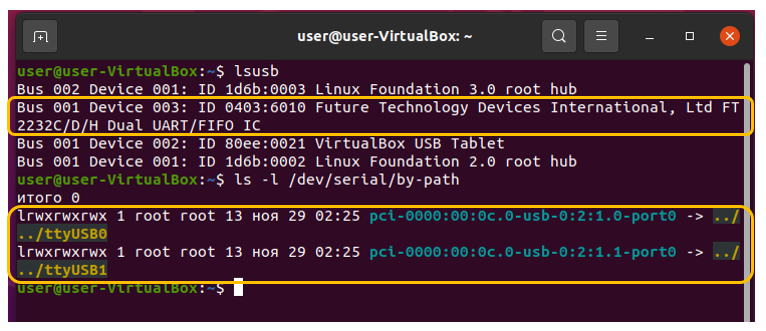
С такими устройствами, если ничего не предпринимать, можно работать только на функциональном уровне. Однако, если функциональный драйвер не подключился, как уверяет начальник, в отличие от Windows такие устройства не станут неизвестными (а потому недоступными). Напротив, с ними можно сразу и без какой-либо подготовки работать через библиотеку libusb. А разработанное нами устройство относится к таковым. Поэтому никакой подготовки для начала работы не требуется. Надеюсь, начальник меня не обманул.
Правда, есть чисто организационная подготовка, которую мы вынесем в собственный раздел.
1.2.2 Отключение требований прав администратора при работе с USB-устройствами
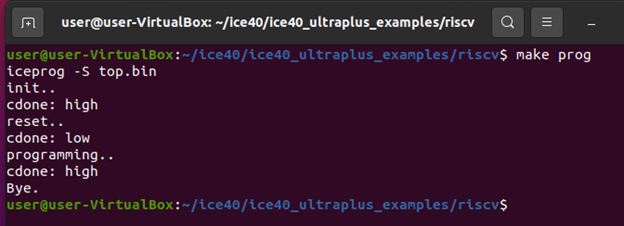
Главная особенность USB-устройств в Linux состоит в том, что по умолчанию для доступа к ним надо обладать правами администратора. То есть, для сборки «прошивки» для ПЛИС ICE40 (к теме статьи они не относятся, но по проекту я сейчас их осваиваю, причём под Linux, так что скриншоты готовить проще для них) мне достаточно набрать make, а вот если для «прошивки» я наберу make prog, то получу такое сообщение:

Не хватает прав. Надо набирать sudo make prog.
Чтобы понизить требуемые права, надо прописать правила. А чтобы быстро выяснить, как их прописать, я обычно даю такой запрос Гуглю:
Usb blaster Linux
Ссылок будет много, все они разной степени шаманства. Вот более-менее подробная ссылка:
Using USB Blaster / USB Blaster II under Linux | Documentation | RocketBoards.org
Что сразу бросается в глаза: имена файлов с правилами для Debian и для Ubuntu разные. /etc/udev/rules.d/92-usbblaster.rules и /etc/udev/rules.d/51-usbblaster.rules, соответственно.
Всё тот же начальник, а по совместительству – любитель Линукса, объяснил, что если в нескольких файлах есть правила для одного и того же устройства, число задаёт приоритет разбора файлов. Собственно, документ также говорит, что число 92 базируется на том, что в системе имеется файл /lib/udev/rules.d/91-permissions.rules.
Вообще, мне стало интересно, и я вбил в Гугля строку поиска
/etc/udev/rules.d/
Он нашёл мне много статей про udev. Некоторые более теоретические. Некоторые слишком практические. Пересказывать их не вижу смысла. При желании вы можете погуглить сами. Дам только ссылку на статью, которая мне кажется хорошо сбалансированной по теории и практике:
Igorka: Знакомство с udev в ubuntu
Итак. Иду в каталог /etc/udev/rules.d. Вижу файл 70-snap.snapd.rules, в котором есть правило, относящееся ко всем FTDI чипам:
FTDI-based serial adapters
# FTDI does USB to serial converter ICs; and it's very likely that they'll
# never do modems themselves, so it should be safe to add a rule only based
# on the vendor Id.
ATTRS{idVendor}=="0403", ENV{ID_MM_DEVICE_MANUAL_SCAN_ONLY}="1"
Не понимая до конца, что творю, запускаю не просто mc, а sudo mc и в его редакторе создаю файл /etc/udev/rules.d /71-ice40.rules со следующим содержимым:
#FTDI Programmer for latice
SUBSYSTEM=="usb", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6010", MODE="0666"
Закрываю терминал с админскими правами, открываю новый, с правами обычными. Отключаю-включаю устройство, и… Вуаля! Оно уже доступно без прав администратора!
Поэтому можете просто повторить мои шаманства, можете – почитать теорию по ссылкам, после чего у вас всё получится уже с пониманием физики процесса. А так – в рамках данной статьи я буду работать только через Windows, но через кроссплатформенную библиотеку libusb версии 1.0 (не путать с 0.1). Поэтому в Линуксе прописывать правила для устройства FX3 не буду.
2 Практика
Ох, и огромный сегодня получился теоретический раздел! Но наконец, мы владеем достаточным количеством знаний, чтобы приступить к опытам. Напомню, я буду работать в ОС Windows, пользуясь библиотекой libusb 1.0, опираясь на драйвер WinUSB. Я сейчас осваиваю работу с кроссплатформенной библиотекой Qt, поэтому буду разрабатывать код под неё.
2.1 Добавляем libusb в проект
Я скачал библиотеку libusb и распаковал её в каталог своего проекта. Чтобы подключить её к проекту, в файл *.pro пришлось добавить блок:
win32:{
LIBS += D:/Work/AS/2020/teensy/Qt/UsbSpeedTest/LibUSB/MinGW64/static/libusb-1.0.a
}
Кто сказал, что абсолютные пути – зло? Золотые слова! Я тоже так считаю. Но я уйму времени убил на эксперименты с относительными путями в этом месте. Ничего не получалось. Поэтому пока сделал так. Если кто-то знает тайну, как в проект добавляются относительные пути, да ещё так, чтобы работали, буду премного благодарен за разъяснения. А пока – отмечаю, что такой вариант работает, но однозначно является злом, так как он работает только у меня и только, пока я не соберусь перенести проект куда-то. Собственно, всё. Библиотека добавлена и готова к работе.
2.2 Класс для доступа к библиотеке
Обычно примеры для статей я пишу в слитном стиле. Но сегодняшний код получился несколько запутанным, поэтому пришлось вынести работу с платой FX3 в примитивный класс. Вот его интерфейсная часть:
#ifndef CUSBTESTER_H
#define CUSBTESTER_H
#include "./LibUSB/libusb.h"
class CUsbTester
{
public:
CUsbTester();
~CUsbTester();
virtual bool ConnectToDevice();
virtual void DisconnectFromDevice();
libusb_device_handle* m_hUsb;
protected:
libusb_context * m_ctx = NULL;
};
#endif // CUSBTESTER_H
По функциям мы ещё пройдёмся, а пока я отмечу то, что у класса есть переменная-член, хранящая указатель на контекст, который будет нужен для вызова некоторых функций тонкой настройки библиотеки, и манипулятор (в простонародии — хэндл) устройства, необходимый для обращения к устройству.
В конструкторе происходит инициализация и тонкая настройка библиотеки:
//#define CY_VID_PID
CUsbTester::CUsbTester()
{
libusb_init(&m_ctx);
#ifdef CY_VID_PID
libusb_set_option(m_ctx, LIBUSB_OPTION_USE_USBDK);
#endif
libusb_set_option(m_ctx, LIBUSB_OPTION_LOG_LEVEL, LIBUSB_LOG_LEVEL_DEBUG);
m_hUsb = 0;
}
Как видим, возможна работа библиотеки через драйвер CyUSB и фильтр UsbDk, но сейчас она отключена. И мы включаем расширенную диагностику работы библиотеки. Все сообщения о проблемах будут сыпаться в окно отладочного вывода. Помните, я показывал сообщение об ошибке при работе UsbDk? Без этой опции никто бы ничего не узнал. Ошибка и ошибка.
Деструктор, соответственно, всё деинициализирует. Класс тестовый, заботиться о наличии дополнительных пользователей библиотекой нет смысла. Так что просто деинициализируем и всё.
CUsbTester::~CUsbTester()
{
DisconnectFromDevice();
libusb_exit(m_ctx);
}
Подключение к устройству интересно лишь тем, что может работать по разным парам VID/PID. Как я уже говорил, я могу собирать «прошивку» под штатные VID/PID от Cypress, если идёт работа через UsbDk, и под те, на которые у меня нашёлся inf-файл, устанавливающий драйвер WinUSB. В остальном, ничем не примечательные типовые вызовы функции библиотеки libusb:
bool CUsbTester::ConnectToDevice()
{
#ifdef CY_VID_PID
m_hUsb = libusb_open_device_with_vid_pid(m_ctx,0x4b4,0xf1);
#else
m_hUsb = libusb_open_device_with_vid_pid(m_ctx,0x1234,0x0005);
#endif
if (m_hUsb == 0)
{
qDebug()<<"Cannot Open USB Device";
return false;
}
int res = libusb_claim_interface(m_hUsb,0);
if (res != 0)
{
qDebug()<<"Cannot claim interface - "<Ну, и отключаемся от устройства тоже типовым методом:
void CUsbTester::DisconnectFromDevice()
{
if (m_hUsb != 0)
{
libusb_release_interface(m_hUsb,0);
libusb_close(m_hUsb);
m_hUsb = 0;
}
}
Собственно, всё. Функцию чтения из устройства я буду вызывать напрямую. Это противоречит принципам проектирования классов, но для опытов сойдёт. Я просто заметил, что код инициализации сильно разросся и отделил его от основного кода, вынеся в класс. А чтение — оно в одну строку выполняется, его отделять было не нужно.
2.3 Тестовая программа
Программа состоит из функции main() и тестовой функции.
Тестовая функция делится на две части. Первая часть измеряет скорость передачи данных. Вторая — проверяет то, что данные из счётчика приходят с инкрементом. При обнаружении разрыва – сведения об этом выдаются в консоль отладочного вывода. Собственно, вот текст функции:
bool TestStep(CUsbTester& tester,uint16_t* pData, const int bytesCnt)
{
bool bResult = true;
qDebug() << "Testing...";
QElapsedTimer timer;
timer.start();
int actualLength;
int res = libusb_bulk_transfer(tester.m_hUsb,0x81,(uint8_t*)pData,bytesCnt,&actualLength,10000);
if (res != 0)
{
qDebug() << libusb_error_name(res);
return false;
}
quint64 after = timer.elapsed();
qDebug() << "Read Result = " << res;
qDebug() << "Actual Length = " << actualLength;
qDebug() << "Time = " << after;
double speed = bytesCnt/after;
qDebug() << speed << "Bytes / Sec";
uint16_t prevData = pData[0];
for (int i=1;iВ будущем я планирую вызывать эту функцию многократно, но пока — функция main() вызывает её один раз:
int main(int argc, char *argv[])
{
QCoreApplication a(argc, argv);
CUsbTester tester;
if (tester.ConnectToDevice())
{
QByteArray ar1;
ar1.resize(128*1024*1024);
for (int i=0;i<1;i++)
{
TestStep (tester,(uint16_t*)ar1.constData(),ar1.size());
}
tester.DisconnectFromDevice();
}
return a.exec();
}
Собственно, и вся программа.
2.4 Результат тестового прогона
2.4.1 Скорость
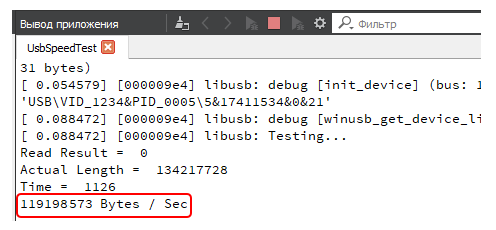
При тестовом прогоне мы видим, что скорость близка к требуемой. Напомню, что источник гонит 16-битные данные на скорости 60 МГц, так что нам требуется поток 120 миллионов байт в секунду. Когда на временных диаграммах наблюдался огромный дефицит колбасы, скорость была всего 30 Мегабайт в секунду. Даже меньше, чем практически достижимая скорость на шине USB 2.0. Так что текущие результаты вполне приемлемые.
Правда, чтобы окончательно успокоиться, я решил немного поэкспериментировать со скоростью. Чаще всего она была равна 119 0XX XXX байт в секунду. Изредка – 119 4XX XXX. Ну, и совсем редко – промежуточные значения, похожие на указанные выше. Сначала я решил, что это могут быть ошибки округления. У нас идёт округление показаний таймера, и возникают округления при делении. Тогда я переписал вычисление скорости так (перешёл на наносекунды и стал умножать перед делением, чтобы минимизировать ошибку округления):
QElapsedTimer timer;
int actualLength;
timer.start();
int res = libusb_bulk_transfer(tester.m_hUsb,0x81,(uint8_t*)pData,bytesCnt,&actualLength,10000);
quint64 after = timer.nsecsElapsed();
if (res != 0)
{
qDebug() << libusb_error_name(res);
return false;
}
qDebug() << "Read Result = " << res;
qDebug() << "Actual Length = " << actualLength;
qDebug() << "Time = " << after;
quint64 size = bytesCnt;
size *= 1000000000;
quint64 speed = size/after;
qDebug() << speed << "Bytes / Sec";
Результат ничуть не изменился. Следующее подозрение было, что источник имеет некоторую ошибку кварцевого резонатора и шлёт данные чуть медленнее, чем надо. Но другая плата даёт точно такие же показания! Значит, дело не в экземпляре. Мало того, осциллограф (правда, весьма дешёвый китайский) говорит, что тактовая частота нисколько не занижена, даже чуть завышена.
Тогда я полез в исходники библиотеки libusb и просто-таки утонул в коде, который исполняется при ожидании конца передачи данных. Там такая цепочка функций – просто закачаешься! И много, где может возникать задержка. Но давайте прикинем, какова задержка.
120 мегабайт в секунду… Округлим до ста. Это 1 мегабайт в 10 миллисекунд. А у нас просадка как раз на 1 мегабайт. Неужели начало и конец прокачки съедают так много времени? Как бы проверить хотя бы начерно? Я решил переписать на пробу код под прямой вызов WinUSB API. Полностью объяснять я его не стану, там устройство открывается хитро, через SetupDi API. Я просто воспользовался готовыми своими старыми классами, поэтому всё было сделано под Visual Studio. Но вместо страшных километровых текстов ожидания завершения библиотеки WinUSB, моя функция чтения выглядит вполне канонически:
int CWinUSBConnector::ReadViaBulk (void* pData,int count,int timeOut)
{
DWORD dwRead;
ResetEvent (m_hEvRead);
if ((!WinUsb_ReadPipe (m_hUsbDrive,m_nReadEP,(BYTE*)pData,count,&dwRead,&m_ovRead)) && (GetLastError() != ERROR_IO_PENDING))
{
return -1;
}
if (WaitForSingleObject(m_hEvRead,timeOut)!=WAIT_OBJECT_0)
{
WinUsb_AbortPipe (m_hUsbDrive,m_nReadEP);
return -2;
} else
{
WinUsb_GetOverlappedResult (m_hUsbDrive,&m_ovRead,&dwRead,FALSE);
}
return dwRead;
}
А тест теперь выглядит так:
#include
#include
#include "./USB/WinUSBConnector.h"
CWinUSBConnector m_connector;
int main()
{
std::cout << "Hello World!n";
if (m_connector.Open() != 0)
{
std::cerr << "Cannot Open Driven";
return 1;
}
LARGE_INTEGER Frequency;
QueryPerformanceFrequency(&Frequency);
static const UINT64 cnt = 128 * 1024 * 1024;
BYTE* pData = new BYTE [cnt];
LARGE_INTEGER StartingTime, EndingTime, ElapsedMicroseconds;
QueryPerformanceCounter(&StartingTime);
UINT64 realSize = m_connector.ReadViaBulk(pData, (int)cnt, 10000);
QueryPerformanceCounter(&EndingTime);
if (realSize != cnt)
{
std::cerr << "Cannot Read Datan";
return 2;
}
ElapsedMicroseconds.QuadPart = EndingTime.QuadPart - StartingTime.QuadPart;
ElapsedMicroseconds.QuadPart *= 1000000;
ElapsedMicroseconds.QuadPart /= Frequency.QuadPart;
UINT64 bytesPerSeconds = (cnt*1000000LL) / ElapsedMicroseconds.QuadPart;
std::cout << "Test Finished! " << bytesPerSeconds << " Bytes per second n";
delete[] pData;
return 0;
}
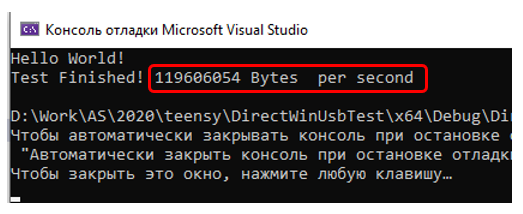
Теперь скорость стабильно находится в районе 119 2XX XXX байт в секунду. Вот какой красивый результат я подловил для красного словца:
А вот результат нескольких прогонов подряд:
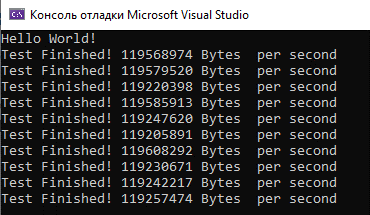
В общем, никто не запрещает просадке возникать и на входе-выходе в функцию чтения. Если разрывов в показаниях счётчика не будет, то и ладно.
2.4.2 Пропуски в показаниях счётчика
Но на тему разрывов у нас тоже имеется пара строк в выводе основной тестовой программы:
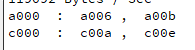
Имеется два нарушения последовательности счёта. Неужели мы нарвались на выпадение данных? К счастью, всё в порядке. Множественные прогоны говорят, что проблемы всегда в одном и том же месте. И мы с таким уже сталкивались в одной из старых статей. У нас есть две точки буферизации данных: буфер контроллера и FIFO в ПЛИС. Готовы ли мы принимать данные или нет, они с выхода счётчика будут заливаться в буфер FX3. Когда тот переполнится, заливка остановится. Кроме буфера FX3, есть ещё FIFO в ПЛИС. Вот у нас и имеется две ёмкости, которые заполнились, но счётчик продолжил работу. При чтении мы увидели разрывы в счёте.
Соответственно, мы наблюдаем явление переходных процессов. При реальной работе надо будет настроить источник так, чтобы он не заполнял буфер данными, пока мы не готовы их принимать (собственно, в статье про голову USB-Анализатора мы уже делали такую функцию через добавление бита «Go»), а пока – просто будем игнорировать ошибки в этой области. Считаем, что это – не баги, а фичи. Меняем проверку разрывов на такую:
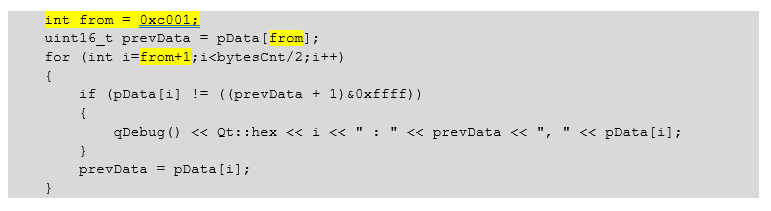
int from = 0xc001;
uint16_t prevData = pData[from];
for (int i=from+1;i
Делаем массовый прогон для такого варианта… И тут я понял, кто даёт задержку… Отладочный вывод!!! Вот так всё выглядит:
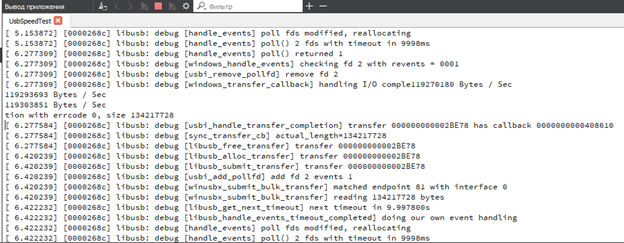
Масса вспомогательных текстов, выдаваемых библиотекой. Ну и отлично. Закомментируем в конструкторе класса, обслуживающего libusb, строку:
// libusb_set_option(m_ctx, LIBUSB_OPTION_LOG_LEVEL, LIBUSB_LOG_LEVEL_DEBUG);
Получаем красоту, ничем не отличимую от того, что мы получали при прямом вызове WinUSB API (жаль только, что не идеальный результат):
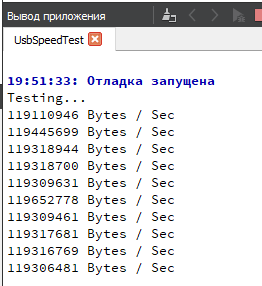
Но главное – нет сообщений про разрывы в показаниях счётчика (известные точки разрывов мы игнорируем).
А что там нам про таймауты промежуточные говорили? Попробуем читать не 128, а 32 мегабайта! Получаем уже скорость вплоть до 119 8XX XXX мегабайт в секунду!
В общем, всё хорошо… Кроме одного. Я нашёл такой нестандартный вариант теста, при котором штатная «прошивка» FX3 подвисает. Но статья получилась такой большой, что как это найти, а главное – как исправить, я расскажу в следующий раз.
3 Заключение
Мы познакомились с теоретическими особенностями работы с USB устройствами в ОС Windows и Linux, а также получили практический навык работы с кроссплатформенной библиотекой libusb. Начерно, разработанное USB 3.0 устройство на базе контроллера FX обеспечивает требуемый поток данных для приёма данных из микросхемы ULPI без промежуточного их сохранения в SDRAM. В потоке не выявлено разрывов, то есть, протокол передачи с виду устойчивый. Автор утверждает, что выявил принципиальную проблему в системе, но выносит её обсуждение в следующую статью.
_large.jpg "Персонализированные вакцины против рака включены в систему ОМС в России")

