В течение четырёх лет на Международную космическую станцию (МКС) будет отправлен российский робот, предназначенный для осуществления внекорабельной деятельности.

ЦНИИ РТК
Как сообщает газета «Известия», инициатором проекта выступает государственная корпорация Роскосмос, а его реализацией занимаются специалисты Центрального научно-исследовательского и опытно-конструкторского института робототехники и технической кибернетики (ЦНИИ РТК).
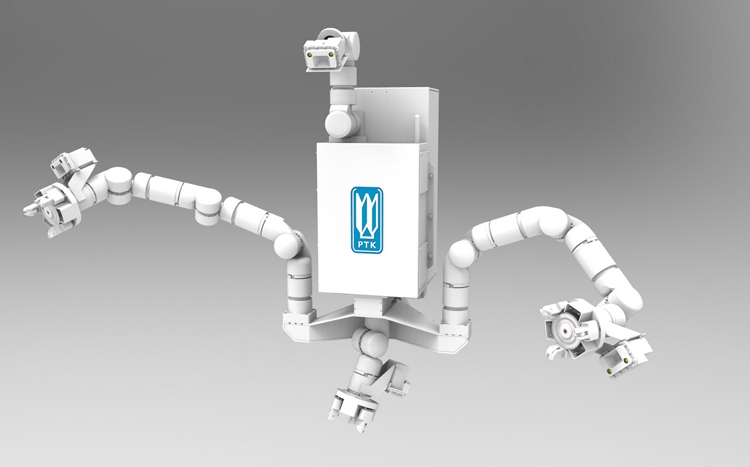
Предполагается, что система с дистанционным управлением сможет выполнять различные операции в открытом космосе, включая оказание необходимой поддержки космонавтам. Манипуляторы косморобота будут оборудованы универсальными захватными устройствами, которые позволят удерживать, перемещать и закреплять полезный груз на внешней поверхности космических аппаратов.
ЦНИИ РТК
В основу робота ляжет модульная платформа. Это даст возможность заменять отдельные узлы в случае поломки, причём ремонтные работы будут осуществляться непосредственно в условиях открытого космического пространства.
Разумеется, в конструкции косморобота будут использоваться исключительно высоконадёжные компоненты. Особое внимание разработчики уделят вопросам обеспечения безопасности.
Опытные образцы робота планируется изготовить в 2018–2019 годах. После этого будут проведены комплексные испытания платформы. На МКС косморобота планируется доставить в 2021 году.
Источник: 3DNews


