
Протез MODESTA: успех или провал в ходе испытаний?
В конце статьи можно увидеть видео с результатами испытаний.


Изначально, ещё в 2021 году, наша команда начинала разработку протеза, похожего на руку человека.
Такое изделие может быть отличным косметическим вариантом для внешнего вида (за счёт пяти пальцев), но возник вопрос:
«Что оно может конкретно дать пользователю, при использовании в быту?».
Эффективность хвата, прочность и его сила – относительно низкие, поэтому, в решении бытовых задач, данные протезы практически не применимы. Опытным путём, мы пришли к роботизированному захвату и созданию сильного и стильного протеза, который точно будет выделяться и станет полезным для широкого спектра задач, таких как:
-
удержание тонких предметов (нож, ложка, ручка, щётка, карточка, лист бумаги и т.д.);
-
захват бутылки (1,5 л.), кружки и др.
Такое решение даёт большую свободу движения, что способствует повышению удобства в использовании.


Почему усложняется производственный процесс создания антропоморфных изделий (похожих на человеческую руку)?
1.) Механика пятипалого протеза, сила сжатия, прочность и хват не позволяют использовать его в качестве повседневного помощника (микродвигатели, занимающие до 60% от общей стоимости ТСР, часто выходят из строя в первую очередь);
2.) Отсутствие обратной связи не даёт тактильных ощущений, поэтому пользователю сложно привыкнуть к протезу. Недоступность точной информации о силе захвата приводит к трудностям при взаимодействии с хрупкими предметами. Только в 5% случаев пользователь выполняет рекомендации специалистов. На основании имеющегося опыта создания прототипов и испытаний пятипалых изделий, мы наблюдаем, как каждая вышеприведённая проблема отражает недостаточную эффективность протезов, в результате которой, пользователь отказывается носить его каждый день. Часто изделие становится лишь “красивым” прикрытием травмы. Как же прийти к естественной мотивации учиться носить протез?


Итак, протестировав пятипалые прототипы, мы пришли к пониманию, что эти протезы не полностью закрывают базовый функционал (простые действия в быту и жизни), и начали разработку изделия, направленного на решение ежедневных задач пользователя. Какое преимущество мы нашли? Простой и надёжный механизм с обратной связью и индивидуальном подходе в реабилитации (восстановлении после травмы) и абилитации (освоения протеза), в том числе с помощью программного обеспечения..



Проблемы, существующие на рынке, решаем за счёт:
1.) Сильной механики кисти, без дефицитных микродвигателей, интуитивным управлением, одним, но многофункциональным хватом и возможностью оперативной замены кисти;
2.) Использования вибротактильной обратной связи, чтобы пользователь смог получить базовые ощущения (например – различать наличие в кисти протеза, предмет и его физическое состояние);
3.) Разработки IT-платформы, чтобы наладить индивидуальный подход создания программы, реабилитации и абилитации пациента, возможности наблюдать за процессом обучения (для юных пользователей в игровой форме и c последующим вознаграждением). Всё это позволяет контролировать движения кисти, от прикосновения до крепкого сжатия, что помогает в
обеспечении точности и комфорта при использовании изделия в повседневной жизни.

Осваиваем токарное ремесло и делаем втулки, оси, шайбы для изделия. Большинство внутренних узлов прототипа делаем самостоятельно.


⚡В начале марта, мы закончили первую версию протеза.
В видео можно посмотреть первые испытания с низкими температурами:
Похожие статьи
 Что почитать на выходных: «Теория каст и ролей» Алекса Крола
Что почитать на выходных: «Теория каст и ролей» Алекса Крола Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда
Эволюция профессий: что важно знать современным айтишникам о прошлом и будущем труда Эксклюзивное интервью Хабра с Ником Бостромом
Эксклюзивное интервью Хабра с Ником Бостромом Три секретами европейских валют
Три секретами европейских валют Видеосвязь больше не гарантия: как дипфейки подрывают доверие в бизнесе
Видеосвязь больше не гарантия: как дипфейки подрывают доверие в бизнесе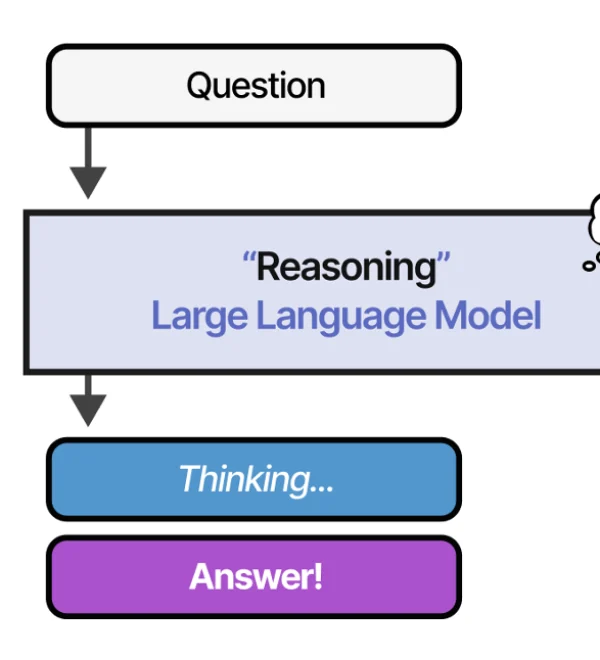 Как мыслит языковая модель
Как мыслит языковая модель Обычные телескопы способны обнаружить межзвездные лазерные маяки внеземных цивилизаций
Обычные телескопы способны обнаружить межзвездные лазерные маяки внеземных цивилизаций Здравый смысл против релятивизма
Здравый смысл против релятивизма