
Не секрет, что самым большим органом человеческого тела является его кожа. Помимо защиты тела от внешних раздражителей, кожа выполняет еще и функцию датчика, собирающего информацию, наряду с глазами, ушами, языком и носом. Информация, получаемая кожей, позволяет человеку оценивать окружающую среду, лучше понимать ситуацию, в которой он находится и действовать в соответствии с ней. Несмотря на огромную важность тактильной информации, о том как именно все работает мы пока знаем не особо много. Посему ученые из Калифорнийского университета (США) решили рассмотреть кожу человека под математическим углом, дабы понять механизм возникновения и передачи тактильных ощущений. Что происходит, когда мы берем что-то в руки, как наша кожа обрабатывает получаемую информацию, и как данное исследование применить на практике? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
У взрослого человека площадь его кожи может достигать 2.3 м2, что делает ее самым большим органом. Однако габариты ничто, если за ними нет никакого функционала. Кожа выполняет достаточно много функций: защитная, дыхательная, экскреторная, терморегуляторная, иммунная, метаболическая и т.д. Другими словами, пытаясь оценивать разные органы по их важности, ставить кожу на последнее место было бы ошибочно.
Самой же загадочной функцией кожи является сбор информации, т.е. формирование осязания — одного из видов чувств человека. Такова температура в комнате, шершавые или гладкие обои, насколько мягкое кресло — все эти и многие другие данные собираются именно кожей.
Невероятная чувствительность кожи заключается в наличии колоссального числа нервных окончаний, т.е. рецепторов. Все они отличаются друг от друга по форме и строению, поскольку выполняют разные задачи (одни собирают информацию про фактуру объекта, другие — про температуру, например).
Рецепторы кожи можно разделить на два основных типа: свободные нервные окончания и несвободные нервные окончания. Первые состоят исключительно из конечных ветвлений осевого цилиндра и располагаются в эпителии. Эти рецепторы собирают данные о температуре (терморецепторы), давлении (механорецепторы) и болевых ощущениях (ноцицепторы).
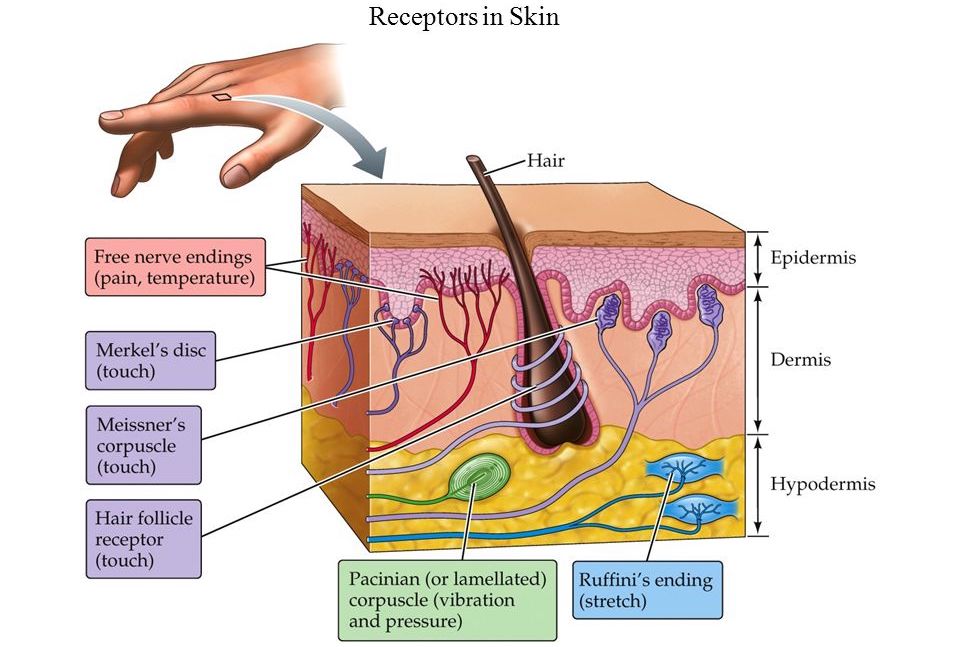
Категоризация несвободных нервных окончаний куда более обширная:
- тельца Пачини — рецепторы давления в подкожно-жировой клетчатке;
- тельца Мейснера — рецепторы давления в дерме;
- тельца Меркеля — рецепторы давления в глубоких слоях эпидермиса;
- тельца Руффини — рецепторы растяжения, реагирующие на тепло;
- колбы Краузе — рецепторы в надсосочковом слое дермы (якобы реагируют на холод, но это под вопросом);
- рецепторы волосяных фолликулов — механорецепторы, которые реагируют на изменение положения волоса.
Это лишь краткий перечень, без глубокого рассмотрения рецепторов, их функций и строения, но и этого достаточно, чтобы понять всю сложность кожи как органа чувств.
Сами исследователи трактуют осязание как кодирование механических сигналов, собранных кожей и подкожными тканями, в нейронные сигналы. Нейронные ответы на тактильные раздражители часто связаны с механическими воздействиями, возникающими из небольших участков кожи, однако есть свидетельства о том, что динамическое прикосновение вызывает механические волны в тактильном диапазоне частот, которые распространяются по всей руке, с переходными возбуждениями, затухающими в течение 30 мс. Таким образом, динамические тактильные воздействия могут стимулировать широкое распространение афферентации*.
Афферентация* — непрерывный поток нервных импульсов от органов чувств к нервной системе.
Было обнаружено, что эти вызванные прикосновением волны способствуют тонкому восприятию и могут использоваться для определения характеристик объекта, к которому дотронулись, области контакта объекта с рукой и дальнейших действий. Также есть данные, что рецептивные поля нейронов в соматосенсорных областях коры мозга охватывают большие участки рук и нескольких пальцев.
Большая площадь контакта на ранних этапах обработки сигналов побуждает корковые нейроны отвечать на входные сигналы, которые доставляются обратно в область контакта.
Таким образом, соматосенсорная обработка может зависеть от информации, переносимой механическими волнами, которые распространяются в тканях в отдаленные участки, удаленные от мест непосредственного механического контакта.
Ученые считают, если перенос механических волн в руке способствует эффективному кодированию соматосенсорной информации, то должна быть возможность описать тактильные стимулы в малых участках посредством информативных параметров. Другими словами преобразовать ощущение прикосновения в цифры.
В своем труде ученые показывают, как механические волны в руке производят эффективное кодирование тактильных входных данных. Проведя опыты с использованием высокоточных датчиков, ученые смогли создать своего рода словарик пространственно-временных сигналов, которые в совокупности позволяют классифицировать входящую информацию с точностью более 95%. То есть им удалось создать карту, показывающую где и какие области кожи руки активируются при контакте с тем или иным объектом.
Результаты исследования
Моделирование тактильной информации ученые изобразили в виде матричного разложения. Оценка кодирования была выполнена посредством собранной в ходе опытов базы данных тактильных стимулов для всей кисти, включающую пространственно-временные изменения кожи a(x, t). На руку добровольца были прикреплены специальные датчики в 30 участках (х). В ходе эксперимента было выполнено 13 жестов и 4600 взаимодействий с различными объектами.
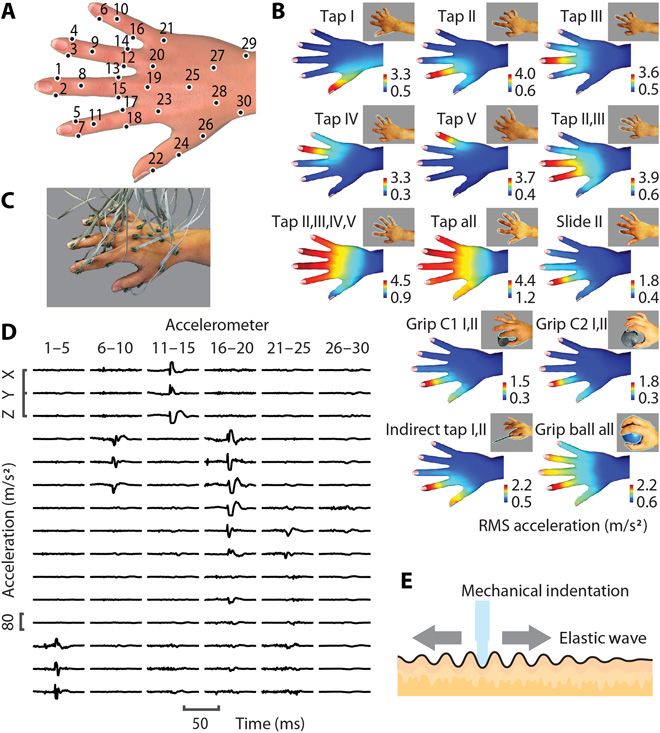
Изображение №1
Каждый из стимулов wi(x, t), внесенный в набор данных, имел собственное время активации hi(t), которое также было учтено в модели для получения более точных «тактильных базовых паттернов» (2А), которые в совокупности кодируют все возникающие стимулы и передающиеся сигналы.
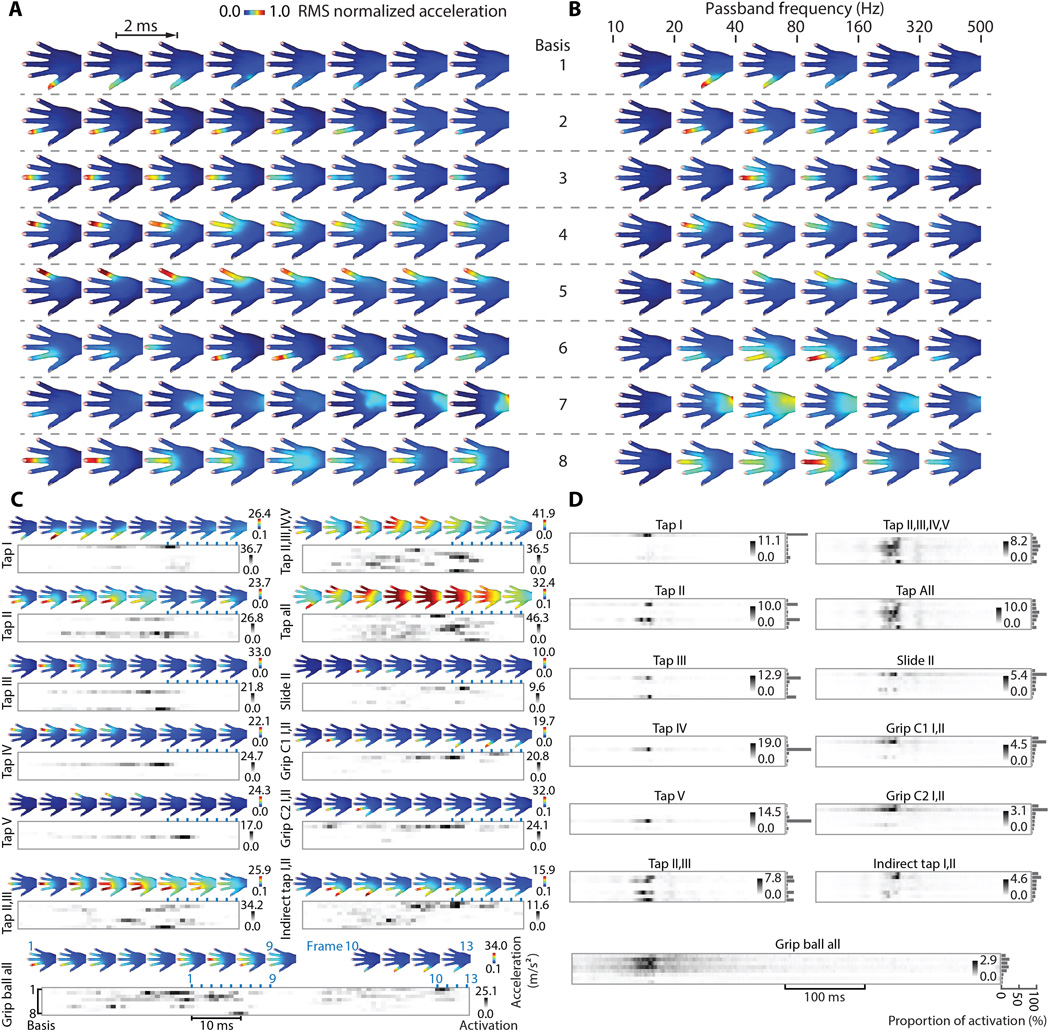
Изображение №2
Эти базисные паттерны (далее базисы) также могут быть интерпретированы как набор фильтров анализа, которые извлекают информацию из внешних стимулов с помощью различных дополнительных паттернов пространственно-временной интеграции механических сигналов в руке. По словам ученых, эти фильтры можно сравнить с функциями спектрально-временной настройки в слуховой обработке или с фильтрами пространственно-временного рецептивного поля при работе сетчатки.
Суммируя, учеными была создана математическая модель, в которой сигналы, ощущаемые по всей руке, были представлены в виде небольшого числа упрощенных паттернов. Данная методика позволила получить основные волновые паттерны — вибрации кожи по всей кисти, которые участвуют в сборе и передаче тактильной информации.
Несмотря на то, что в анализе не учитывались условия возникновения сигналов, тактильные базисы напоминали сенсорную функцию кисти (2А и 2В). Большинство из них первоначально были локализованы на дистальных концах одного из пальцев (наиболее плотно иннервируемые области кисти). Скорость движения сигналов составляла порядка 1-10 м/с, а затухание сигнала наблюдалось спустя 10-30 мс после его возникновения. Другие тактильные базисы эволюционировали от дистальной области отдельных пальцев до диффузных областей поверхности кисти (2А). В аспекте частоты, пара базисов демонстрировала схожее пространственное расположение, но разные частотные характеристики. К примеру, есть пара базисов, локализованных в пределах одного пальца, но имеющих разные фильтрационные свойства (относительно передаваемых сигналов): нижний диапазон от 20 до 80 Гц (2В, базис 2) или верхний диапазон от 80 до 160 Гц (2B, базис 6).
Изображение №3
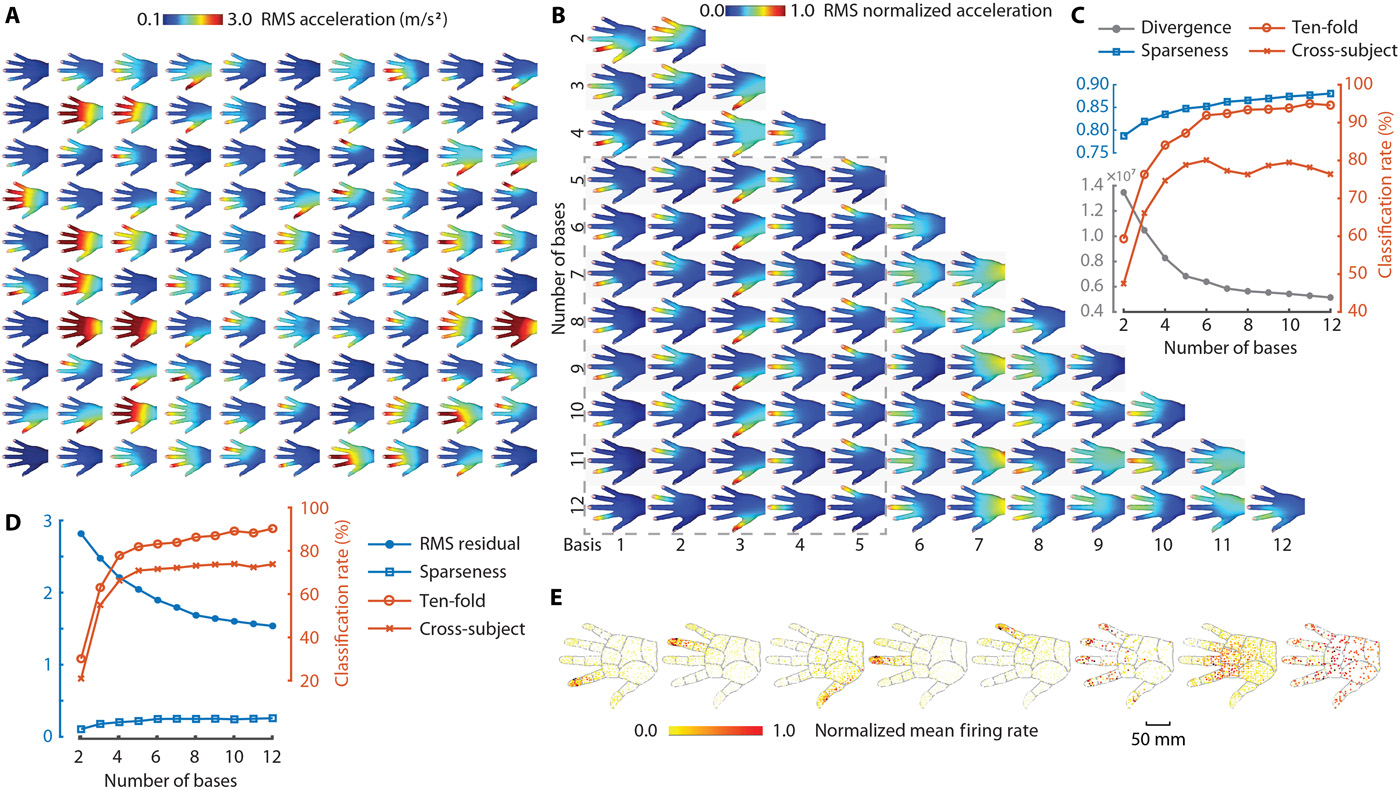
Ученые считают, что пространственно-временные тактильные базисы связаны с определенным пальцем, т.е. имеют свою рабочую зону, так сказать. Например, 45% из 4600 проанализированных тактильных раздражителей были вызваны жестами, когда с объектом контактировал только один палец. Проведя повторный анализ, исключающий тактильные сигналы, создаваемые одним лишь пальцем, была обнаружена такая же тенденция.
Пространство возможных тактильных раздражителей ограничено механикой и продолжительностью контакта (3А).
Далее ученые решили проверить, сколько базисов должно быть задействовано для определения источника сигнала. Как оказалось, если использовать не менее 7, то точность определения составит 90%, а если 12, то 95%. Тем не менее, не все стимулы требуют активации столь большого числа базисов для повышения точности. Логика достаточно прямолинейна: когда в жесте задействовано несколько пальцем, то активируются несколько базисов; если же в жесте задействован лишь один палец, то и базисов будет один, максимум два. При этом сами базисы также варьировались в зависимости от жестов. То есть, разные жесты, хоть в них и задействованы одинаковые пальцы, будут активировать разные базисы.
Модель также показала, что достаточно пяти базисов для максимизации точности (80%), с которой стимулы от одного участника опытов могли быть классифицированы с использованием данных от других участников (3C). Эти пять базисов были практически универсальны среди всех участников и соответствовали пяти пальцам кисти (3B).
Совокупность вышеописанных наблюдений говорит о том, что сама эластичность кожи играет важную роль в сборе и передаче информации, поскольку за счет нее увеличивается площадь контакта с объектом. Кроме того, волны сигналов, распространяющиеся по определенному паттерну, позволяют классифицировать полученную информацию, что также способствует ускорению ее обработки непосредственно мозгом.
Подобные механизмы обработки сигналов можно сравнить с работой среднего уха, которое распространяя звуки с различным частотным содержанием на разные сенсорные рецепторы в ухе, помогает кодированию звуков слуховой системой.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
Данное исследование показало нам, что кожа является намного более сложной системой, чем считалось ранее. Если раньше процесс передачи сигналов можно было описать линейно (прикосновение — возникновение сигнала — передача сигнала в мозг), то сейчас этот процесс скорее похож на волновую активность. Сигналы, получаемые от объектов взаимодействия с кожей, распространяются волнами по нервным окончаниям кожи в зависимости от зоны контакта, его продолжительности и характера поверхности. Другими словами, в сборе информации про объект контакта участвуют не только рецепторы в непосредственно месте контакта, но и рецепторы вокруг этой зоны.
Исследователи считают, что в этом сложном процессе не последнюю роль играет эластичность кожи, позволяющая увеличить площадь контакта с точки зрения распространения сигналов, а не с точки зрения непосредственно самого контакта.
По мнению ученых, их труд позволит не только лучше понять работу мозга и нервной системы человека, но и пригодится в разработке новых протезов и даже роботов, способных тактильно более точно собирать информацию об окружающей среде.
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! 🙂
Немного рекламы 🙂
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Equinix Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?


