
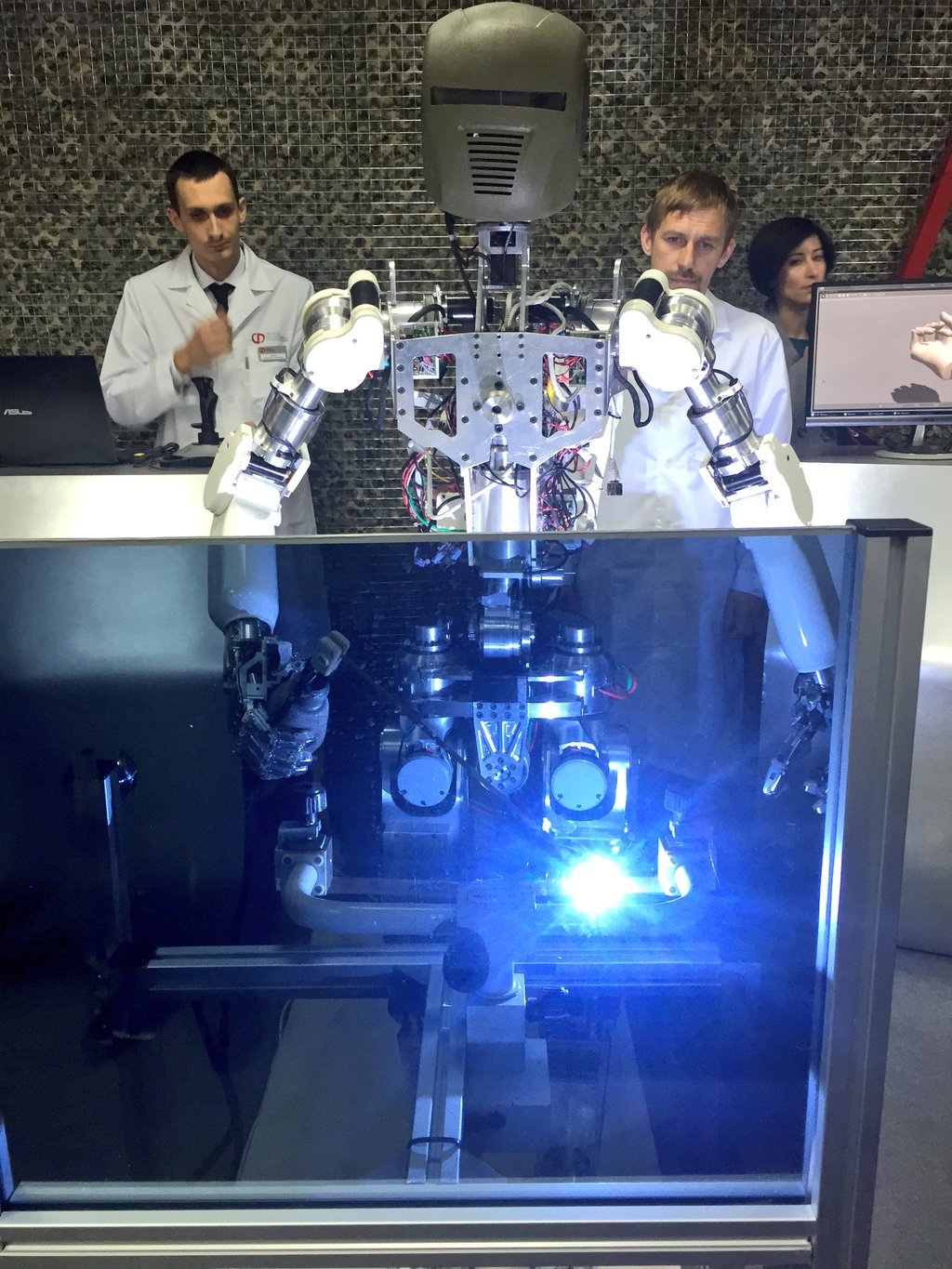
Робот «Аватар». Фото: twitter.com/i_korotchenko
На выставке экспериментальной лаборатории ОАО «ЦНИИТОЧМАШ» представлены последние разработки научно-исследовательских институтов Ростеха — прототипы роботов «Рысь-БП» и «Аватар», а также армейский экзоскелет. Об этих разработках вкратце сообщалось ранее, но публике их показали только сейчас.
«Рысь-БП» и «Аватар» могут использоваться для проведения спасательных работ, в космонавтике («Аватар»), а также как боевые роботы при наличии соответствующего вооружения.
«Аватар»
Антропоморфный робот «Аватар» создаётся в НПО «Андроидная техника» и ФГУП «ЦНИИмаш» при поддержке Фонда перспективных исследований. Этот робот будет преодолевать полосу препятствий и управлять транспортными средствами, как это делали американские роботы на конкурсе DARPA.
«Программой работ по данному проекту предусмотрено провести в конце года испытания робота на полосе препятствий. «Аватар» должен преодолеть её элементы, продемонстрировать возможность управления различными техническими устройствами, в том числе автомобилем, подняться по лестнице», — сказал заместитель генерального директора Фонда Виталий Давыдов.
Первоначально создание антропоморфного робота осуществлялось в интересах МЧС для спасательных работ. Однако впоследствии было учтено, что большинство компонентов робота-спасателя могут быть использованы и для решения военных задач, а также в космонавтике.
«Аватар будет одним из членов экипажа будущей российской национальной орбитальной станции», — говорил в феврале вице-премьер РФ Дмитрий Рогозин. Такая разработка позволит без специального скафандра выходить в открытый космос и под контролем оператора-космонавта, находящегося под защитой, проводить особо сложные операции на борту космического корабля.
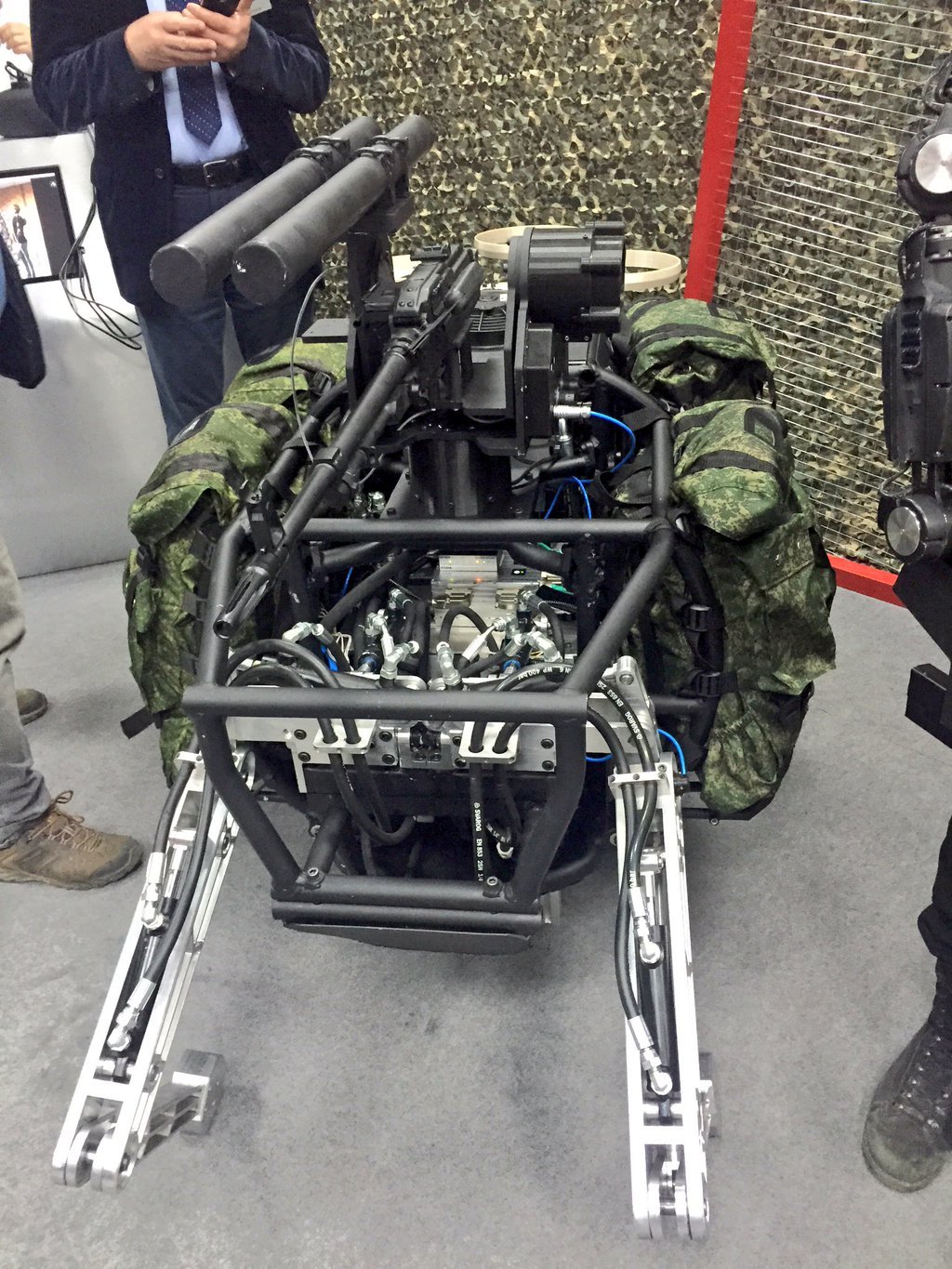
«Рысь-БП»
«Рысь-БП» — биоморфный робот, то есть подобный животному, на четырёх ногах. Его планируют вооружать не только пулемётом, но и противотанковыми управляемыми ракетами, сказал генеральный директор разрабатывающего «Рысь» предприятия — ВНИИ «Сигнал» — Владимир Шашок. По его словам, рассматриваются три варианта целевой нагрузки: робот разведки, робот боевой поддержки и робот для переноски грузов. «Боевой робот, скорее всего, будет оснащаться пулеметом, возможна установка ПТУР», — сказал он.
Робот должен уметь передвигаться по любым поверхностям и по воде глубиной до 40 см, преодолевать пороги высотой до 500 мм, лестничные марши промышленных зданий с углом наклона до 30° и высотой ступени до 200 мм, рвы шириной до 500 мм и стены высотой до 400 мм и шириной до 300 мм.
На равнине робот будет развивать скорость до 15 км/ч, по пересечённой местности — до 10 км/ч.

Государственные испытания «Рыси-БП» планируется провести в 2019 году.
Техническое задание к открытому конкурсу на право заключения договора на выполнение составной части опытно-конструкторской работы по теме «Базовые платформы мобильных биоморфных роботов» содержит некоторые технические характеристики робота.
Полное наименование – Базовая платформа мобильного биоморфного робота массой до 400 кг.
Сокращенное наименование – БПМБР400.
В состав БПМРБ400 должны входить:
платформа;
аппаратура управления движением;
система электропитания;
аппаратура подъёма робота после опрокидывания;
программный комплекс.
В состав платформы должны входить:
корпус;
4 рычажных движителя;
приводы движителей.
Целевая нагрузка определяет функциональное назначение.
На БПМБР400 должна устанавливаться одна из целевых нагрузок:
— средства разведки;
— платформа перевозки боеприпасов и амуниции;
— средства эвакуации убитых и раненых с поля боя;
— средства разведки минно-взрывных заграждений;
— средства вооружения.
При установке на БПМБР400 платформы перевозки боеприпасов и амуниции общая масса боеприпасов и амуниции должна быть до 200 кг.
БПМБР400 с установленными системами и аппаратурой управления и целевой нагрузкой, в том числе с загруженной платформой перевозки боеприпасов и амуниции, должен обеспечивать:
— передвижение в условиях городской инфраструктуры по бетонным, асфальтовым, мраморным, деревянным и грунтовым площадкам и площадкам с песчаным покрытием глубиной до 100 мм;
— передвижение по пересеченной и сильно пересеченной местности, в гололедицу, по опавшим листьям, по траве высотой до 1 м, снегу глубиной до 400 мм, в дождь, по залитым водой поверхностям глубиной до 400 мм;
— передвижение по горной местности и разрушенной городской инфраструктуре, на промышленных предприятиях, в производственных и жилых помещениях;
— преодоление:
– порогов высотой до 500 мм;
– лестничных маршей промышленных зданий и сооружений с углом наклона до 30° и высотой ступени до 200 мм;
– рва шириной до 500 мм;
– стенки высотой до 400 мм и шириной до 300 мм;
— скорость движения полностью оснащенного с полезной нагрузкой:
– до 15 км/ч при движении по равнинной местности;
– до 10 км/ч при движении по пересеченной местности.
— устойчивое движение по горизонтальной поверхности с сохранением исходного положения платформы;
— подъем в снаряженном состоянии по наклонной поверхности с углом до 40°;
— разворот на месте с изменением положения не более 1 м;
— адаптацию положения опорных поверхностей комплекса, в соответствии с рельефом местности в автоматическом режиме;
— устойчивое положение комплекса при использовании активных систем с силовым воздействием не более 150 Н;
— движение по поверхности с несущей способностью грунта более 0,2 Н/мм² (супеси, насыщенные влагой (пластичные));
— сохранение устойчивого, восстанавливаемого положения при кратковременном воздействии (t = 0,2 c) на базовую платформу с усилием до 150 Н;
— опускание корпуса БПМБР400 на грунт с обеспечением устойчивого положения и возможностью последующего подъема.
Управление функционированием БПМБР400 должно осуществляться от бортовой информационно-управляющей системы и аппаратуры планирования маршрутов и перемещений в режимах управления движением: дистанционном, полуавтономном, автономном и следования за маяком (поводырем).
БПМБР400 должна обеспечивать время перевода:
— из транспортного положения в боевой – не более 1 мин;
— из боевого положения в транспортное – не более 2 мин.
Масса оснащенного и заправленного МБР400 должна быть не более 400 кг.
Общая масса боеприпасов и амуниции транспортируемая МБР400 должна быть до 200 кг.
Габаритные размеры БПМБР400 без целевой нагрузки и антенн должны быть не более:
— в боевом положении – не более 2000х1000х1200 мм;
— в транспортном положении – не более 2000х1000х600 мм.
Аппаратура управления движением должна обеспечивать прекращение движения и переход в режим ожидания команд оператора в случаях:
— столкновения с непреодолимым препятствием;
— превышения неровностей профиля поверхности грунта по сравнению с величинами, допустимыми для работы;
— превышения допустимых углов продольного и поперечного крена БПМБР400.
— недопустимых опорных характеристик грунта.
Оператору должны быть переданы сообщения о причинах остановки.
Аппаратура подъёма МБР400 после опрокидывания должна обеспечивать возврат в исходное положение МБР400 после опрокидывания «на бок» – поворот МБР400 на угол до 90°, в том числе, с транспортируемыми боеприпасами и амуницией.
В состав аппаратуры электропитания должны входить:
— автономный электроагрегат на двигателе внутреннего сгорания с дистанционным управлением;
— аккумуляторные батареи;
— блоки управления, коммутации и защиты;
— топливный бак.
Аппаратура электропитания должна обеспечивать питание аппаратуры и оборудования с положительным балансом электроэнергии при всех заданных условиях эксплуатации, в том числе на высоте 3000 м над уровнем моря.
Аппаратура электропитания должна обеспечивать электропитание потребителей МБР400 от:
— электроагрегата в движении и на стоянке – не менее 24 часов (с дозаправкой);
— от аккумуляторных батарей:
— в движении не менее 0,5 часа;
— на стоянке – не менее 5 часов;
— в дежурном режиме – не менее 6 часов.
Должна обеспечиваться подзарядка аккумуляторных батарей при работе электроагрегата. Должна обеспечиваться зарядка аккумуляторных батарей от устройства зарядки (из состава ПДУ).
Должна обеспечиваться возможность электроснабжения МБР400 от бортсети ПДУ и от промышленной сети напряжением 380/220(+10%,-15%)В с частотой 50 1 Гц (ГОСТ 11295-65) через преобразователь напряжения, который должен входить в комплект ЗИП-Г.
——
Базовая платформа мобильного биоморфного робота массой до 100 кг.
Полное наименование – Базовая платформа мобильного биоморфного робота массой до 100 кг.
Сокращенное наименование – БПМБР100.
В состав платформы должны входить:
— корпус;
— 4 рычажных движителя;
— гидравлический привод движителей.
БПМБР100 должна служить базой для создания мобильного биоморфного робота путем установки на нее систем и аппаратуры управления и целевой нагрузки:
— бортовой информационно-управляющей системы;
— аппаратуры технического зрения;
— аппаратуры передачи данных;
— аппаратуры навигации и ориентации;
— аппаратуры планирования маршрутов и перемещений:
— аппаратуры управления движения за маяком (поводырь);
— целевой нагрузки.
На БПМБР100 должна устанавливаться одна из целевых нагрузок:
— средства разведки;
— платформа перевозки боеприпасов и амуниции;
— средства разведки минно-взрывных заграждений;
— средства вооружения.
При установке на БПМБР100 платформы перевозки боеприпасов и амуниции общая масса боеприпасов и амуниции должна быть до 60 кг.
БПМБР100 с установленными системами, аппаратурой управления и целевой нагрузкой, в том числе с загруженной платформой перевозки боеприпасов и амуниции, должен обеспечивать:
— передвижение в условиях городской инфраструктуры по бетонным, асфальтовым, мраморным, деревянным, грунтовым площадкам и площадкам с песчаным покрытием глубиной до 100 мм;
— передвижение по пересеченной местности по твердым почвам, в гололедицу, по опавшим листьям, по траве высотой до 0,5 м, снегу глубиной до 200 мм, в дождь, по залитым водой поверхностям глубиной до 300 мм:
— преодоление:
– порогов высотой до 400 мм;
– лестничных маршей промышленных зданий и сооружений с углом наклона не менее 300 и высотой ступени до 200 мм;
– рва шириной до 400 мм;
– стенки высотой до 300 мм и шириной до 200 мм;
— скорость движения полностью оснащенного с полезной нагрузкой:
– до 15 км/ч при движении по равнинной местности;
– до 10 км/ч при движении по пересеченной местности.
— устойчивое движение по горизонтальной поверхности с сохранением исходного положения платформы;
— подъем в снаряженном состоянии по наклонной поверхности с углом до 40°;
— разворот на месте с изменением положения не более 1 м;
— адаптацию положения опорных поверхностей комплекса, в соответствии с рельефом местности в автоматическом режиме;
— устойчивое положение комплекса при использовании активных систем с силовым воздействием не более 150 Н;
— движение по поверхности с несущей способностью грунта более 0,2 Н/мм² (супеси, насыщенные влагой (пластичные));
— сохранение устойчивого, восстанавливаемого положения при кратковременном воздействии (t = 0,2 c) на базовую платформу с усилием до 150 Н;
— опускание корпуса МБР100 на грунт с обеспечением устойчивого положения и возможностью последующего подъема.
Управление функционированием БПМБР100 должно осуществляться от бортовой информационно-управляющей системы и аппаратуры планирования маршрутов и перемещений в режимах управление движением: дистанционном, полуавтономном, автономном и следования за маяком (поводырем).
БПМБР100 должна обеспечивать время перевода:
— из транспортного положения в боевой – не более 1 мин;
— из боевого положения в транспортное – не более 2 мин.
Масса оснащенного и заправленного МБР100 должна быть не более 120 кг.
Общая масса боеприпасов и амуниции, транспортируемая МБР100 должна быть до 60 кг.
Габаритные размеры БПМБР100 без целевой нагрузки и антенн должны быть не более:
— в боевом положении – не более 1500 х 800 х 1000 мм;
— в транспортном положении – не более 1500 х 800 х 400 мм.
Аппаратура управления движением должна обеспечивать прекращение движения и переход в режим ожидания команд оператора в случаях:
— столкновения с непреодолимым
препятствием;
— превышения неровностей профиля поверхности грунта по сравнению с величинами, допустимыми для работы;
— превышения допустимых углов продольного и поперечного крена БПМБР400.
— недопустимых опорных характеристик грунта.
Оператору должны быть переданы сообщения о причинах остановки.
Аппаратура подъёма МБР100 после опрокидывания должна обеспечивать возврат в исходное положение МБР100 после опрокидывания «на бок» — поворот МБР100 на угол до 90°, в том числе, с транспортируемыми боеприпасами и амуницией.
Аппаратура электропитания должна обеспечивать питание аппаратуры и оборудования с положительным балансом электроэнергии при всех заданных условиях эксплуатации, в том числе на высоте 3000 м над уровнем моря.
Аппаратура электропитания должна обеспечивать электропитание потребителей МБР100 от:
— электроагрегата в движении и на стоянке – не менее 24 часов (с дозаправкой);
— от аккумуляторных батарей:
— в движении не менее 0,5 часа;
— на стоянке – не менее 5 часов;
— в дежурном режиме – не менее 6 часов.
Аппаратура электропитания должна обеспечивать:
— питание стартерной цепи электроагрегата от аккумуляторных батарей аппаратуры электропитания;
— ручной и дистанционный запуск и остановку электроагрегата;
— ручное, автоматическое и дистанционное подключение электроагрегата к бортсети МБР;
— автоматическое отключение потребителей от электроагрегата во время его запуска;
— подключение и отключение аккумуляторных батарей к бортсети МБР;
— электропитание потребителей МБР от внешнего источника постоянного тока с выходным напряжением 27,5±1,0 В при условии, что аккумуляторные батареи подключены к бортсети МБР;
— формирование выходных напряжений для электроснабжения потребителей с качеством, соответствующим требованиям ГОСТ РВ 20.39.309-98;
— защиту цепей электроснабжения потребителей от перегрузок, коротких замыканий и переполюсовок;
— отключение аккумуляторных батарей от бортсети при снижении напряжения аккумуляторных батарей менее 22,5 — 0,5 В
Должна обеспечиваться подзарядка аккумуляторных батарей при работе электроагрегата. Должна обеспечиваться зарядка аккумуляторных батарей от устройства зарядки (из состава ПДУ).
Должна обеспечиваться возможность электроснабжения МБР100 от бортсети ПДУ и от промышленной сети напряжением 380/220 (+10%,-15%) В с частотой 50 1 Гц (ГОСТ 11295-65) через преобразователь напряжения, который должен входить в комплект ЗИП-Г.
——
Радиоэлектронные средства по ЭМС, помехозащищенности и радиоэлектронной маскировке должны соответствовать требованиям ГОСТ РВ 20.39.309-98.
Средства передачи данных элементов БПМБР400 (БПМБР100) должны обеспечивать их электромагнитную совместимость и нормально функционировать в условиях преднамеренных и непреднамеренных помех.
БПМБР400 (БПМБР100) должен быть устойчив к влиянию ЭМП естественного и искусственного происхождения в соответствии с ГОСТ РВ 20.39.308-98.
По стойкости, прочности и устойчивости к внешним воздействующим факторам БПМБР400 (БПМБР100) должны удовлетворять требованиям ГОСТ РВ 20.39.304-98 группе 1.4.1 исполнения О (с учетом п.4.16 для БПМБР100) со следующими уточнениями:
— пониженная температура среды:
— рабочая – минус 40° С;
— предельная – минус 40° С;
— повышенная температура среды:
— рабочая – плюс 50° С;
— предельная – плюс 50° С;
— изменение температуры окружающей среды от минус 40° до + 50° С.
Требования по устойчивости к компонентам ракетного топлива и агрессивным средам и плесневым грибам не предъявляются.
Средняя наработка БПМБР400 (БПМБР100) между отказами должна быть не менее 1500 ч.
Примечания:
1. Критерием отказа является невозможность дальнейшего использования БПМБР400 (БПМБР100) по назначению без проведения ремонта.
Среднее время восстановления работоспособного состояния БПМБР400 (БПМБР100) с использованием состава ЗИП-О и комплекта ЗИП группового (ЗИП-Г) должно быть не более 2,5 часов без учета времени доставки заменяемой составной части.
Средний ресурс БПМБР400 (БПМБР100) должен быть не менее 1000 час.
Средний срок службы БПМБР400 (БПМБР100) не менее 5 лет.
Средний срок сохраняемости БПМБР400 (БПМБР100) должен быть не менее 10 лет.
Время непрерывной работы БПМБР400 (БПМБР100) должно быть не менее 24 ч.
Срок хранения БПМБР400 (БПМБР100) в условиях неотапливаемых хранилищ (температура от минус 35° до + 45° С. при относительной влажности до 85%) должен составлять 10 лет, в том числе один год в полевых условиях в штатной таре.
В конструкции БПМБР400 (БПМБР100) должна быть предусмотрена применяемость стандартных и заимствованных деталей и узлов.
Номенклатура применяемых марок и сортамента материалов должна быть минимальной.
Применяемые масла, смазки, жидкости должны быть из номенклатуры принятых на снабжение войск.
БПМБР400 (БПМБР100) должны строиться по модульному принципу, обеспечивающему замену средств, узлов и агрегатов в случае их выхода из строя, обладать необходимой унификацией по составу технических средств, возможностям общего, общесистемного программного, информационного и лингвистического обеспечения
Применяемые в конструкции БПМБР400 (БПМБР100) лакокрасочные и гальванические покрытия не должны поддерживать горение при воздействии пламени и обеспечивать коррозионную стойкость приборов при хранении и эксплуатации в составе БПМБР400 (БПМБР100).
Конструкция БПМБР400 (БПМБР100) должна исключать возможность неправильного подключения соединителей жгутов.
Конструкция БПМБР400 (БПМБР100) должна предусматривать возможность установки бронезащиты.
При разработке БПМБР400 (БПМБР100) должны применяться сырье, материалы и электрорадиоизделия отечественного производства.
Комплектующие электрорадиоизделия должны применяться в соответствии с перечнями, разрешающими их применение в изделиях военного назначения.
Применение импортной элементной базы производится в установленном порядке.
Этап 1. Разработка эскизно-технического проекта. Разработка, изготовление и испытание макета БПМБР400 для подтверждения принятых решений на этапе эскизно-технического проекта и определения достижимости требований ТЗ.
Срок – август 2015 г. — ноябрь 2016 г.
Этап 2. Разработка рабочей конструкторской документации для изготовления опытных образцов платформ мобильных биоморфных роботов.
Срок – декабрь 2016 г. – июль 2017 г.
Этап 3. Изготовление опытных образцов платформ мобильных биоморфных роботов и проведение предварительных испытаний.
Срок – август 2017 г. – декабрь 2018 г.
Этап 4. Участие в Государственных испытаниях опытного образца.
Срок – январь 2019 г. – июнь 2019 г.
*****
После многих желаемых характеристик в документации указано «Условия и характеристики… уточняются на этапе разработки эскизно-технического проекта».
Экзоскелет
О боевом экзоскелете подробности пока не разглашаются. Судя по фотографиям, с его помощью боец будет фиксировать руку с оружием в согнутом состоянии. Нагрузка с плеча переносится на спину.


Представленные роботы найдут применение в МЧС, космонавтике, в российской армии и за рубежом: значительный объём вооружений Ростеха поставляется на экспорт.
Кроме роботов, ЦНИИТОЧМАШ показал ещё немало интересного. Например, девушка-испытатель, блондинка, демонстрировала новый защитный костюм для армии, шагая по минному полю сквозь пламя и взрывы. Пиротехника зрелищно взрывалась у неё под ногами.

Вице-премьер Рогозин сравнил девушку с Терминатором.


