Как Boston Dynamics удалось научить робота Atlas бегать, прыгать, делать сальто и танцевальные па? О секретах робота рассказали основатель Boston Dynamics Марк Райберт и инженер компании Скотт Куиндерсма. Это статья подготовлена по материалам их выступления. Но как говорится, лучше 1 раз увидеть, чем 100 раз прочитать, поэтому смотрите наше видео:
Говоря об умных роботах, первое, что надо понимать, что у машин, как и у людей, есть два типа интеллекта: двигательный и когнитивный. Когнитивный интеллект позволяет осознать проблему и понять, как ее решить. Двигательный интеллект позволяет управлять телом, не задумываясь о том, как ходить или прыгать, управлять своей энергией, рассчитывая силы на то или иное действие, а также воспринять информацию в реальном времени для взаимодействия с окружающей средой.
Подход Boston Dynamics к своим роботам заключается в том, чтобы сначала создать надежный и работоспособный в любых обстоятельствах двигательный интеллект. Далее приступать к созданию когнитивного, которому будет проще планировать действия робота, опираясь на развитый двигательный интеллект. И затем инженеры должны наладить взаимодействие двигательного и когнитивного интеллектов.

Atlas использует свое восприятие в реальном времени для того, чтобы определить местонахождение препятствий, выбрать места опоры для ступней и координировать перенос массы тела во время движения, удерживаясь на ногах. Atlas воспринимает свое окружение так, как вы сейчас видите на экране. Во время своего движения он решает, есть ли возможность избежать препятствие, и регулирует положение тела, опираясь на расчетную траекторию, но учитывая обратную связь при выполнении расчетных действий.

Такой результат обеспечивается не только программным обеспечением и элементами управления, но и конструкцией робота. Самой важной деталью робота является очень компактный гидравлический силовой агрегат массой всего 5 кг и мощностью 5 кВт. Он разработан Boston Dynamics и вмещает электродвигатель, насос, резервуар, аккумулятор, несколько фильтров, электронику и систему охлаждения. Все это помещено в прочный корпус и размещено прямо внутри робота. Агрегат питается от легкой батареи емкость 1400 ватт*час, также разработанной Boston Dynamics. Прочный корпус не позволит аккумулятору загореться, если робот упадет.

Инженерам компании вообще многое пришлось создавать с нуля. И пространственную конструкцию рамы и ног, которые должны быть легкими, но очень прочными. И легкие гидравлические сервоклапаны особой конструкции. И, напечатанный на 3Д принтере гидравлический коллектор, вмещающий все 18 клапанов, а также сразу содержащий в своей структуре напечатанные фитинги и шланги, чтобы максимально облегчить конструкцию.

Робот контролирует свое передвижение в реальном времени с помощью камер, расположенных на передней части его условной головы. В руках и ногах робота в общей сложности 28 суставов. В области таза и по всему телу робота размещены датчики, которые измеряют ускорение робота, положение его тела в пространстве при движении и другие параметры его взаимодействия с окружающим миром.
Робот активно балансирует во время ходьбы, бега и трюков. Он умеет использовать силу инерции, чтобы экономить энергию. Он осматривает местность и ощущает ее через сенсоры в стопах, одновременно регулируя силу, прилагаемую ногами к земле. Каждый прыжок, кувырок или сальто требует от робота массы вычислений. Инженеры подчеркивают, что все роботы компании держат равновесие самостоятельно. Это означает, что если вы толкнете любого из них, то он отреагирует как человек, сделав шаг в сторону.
Atlas не выбирает, что ему делать. Команды отдает оператор. Он нажимает кнопки, подсказывая роботу, что здесь надо прыгнуть, здесь сделать сальто, а тут повернуться. Но вычислять, как именно сделать такое движение в данных условиях из текущего положения, роботу приходится самому. Как это ему удается? Давайте рассмотрим, как программируют и создают элементы управления для робота.
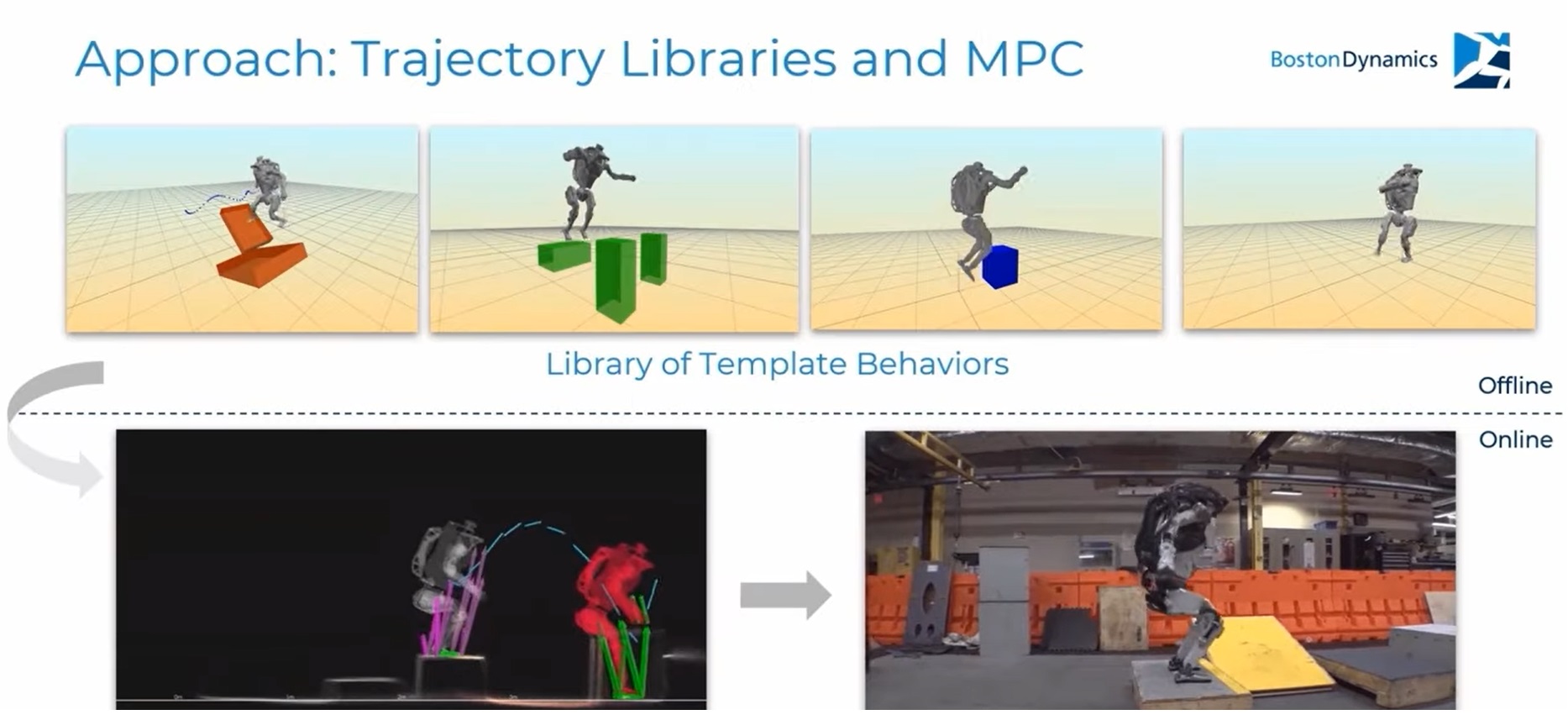
Подход Boston Dynamics к программированию основан на прогнозирующей модели. Это означает, что исследователи используют всю имеющуюся у них информацию о роботе для того, чтобы разработать алгоритмы управления динамическими характеристиками. Также они проводят очень много предварительных вычислений всего, что может пригодиться роботу для выполнения той или иной задачи.
Например, для Atlas создана целая библиотека предварительно рассчитанных траекторий движения. Система управления роботом берет информацию о предварительно рассчитанных траекториях и адаптирует ее к текущим условиям, информацию о которых собирает система восприятия. Atlas выбирает из библиотеки подходящую для выполнения задачи траекторию, а затем изменяет ее в соответствии с текущими условиями.Пока робот не может обучаться новым движениям самостоятельно, на основе предыдущего опыта, а действует строго по запрограммированным моделям. Хотя инженеры Boston Dynamics наверняка уже думают о его самообучении.

Что касается системы восприятии робота, то здесь Boston Dynamics использует геометрическую сегментацию. Робот буквально разбивает окружающее пространство на локальные области с простыми геометрическими формами. Эти формы становятся входными данными для системы планирования, которая продумывает несколько шагов вперед так, чтобы робот удержал равновесие, правильно использовав свои руки и ноги. Но эта информация не является статичной, она изменяется в режиме реального времени, позволяя роботу лучше приспосабливаться к условиям и избегать ошибок предварительных расчетов.
Большой плюс робота Atlas в том, что раз научившись делать сальто он изо дня в день может делать его точно так же, с той же эффективность. Это помогло инженерам в создании потрясающего видео танцующих роботов.

Чтобы научить Atlas танцевать, компания привлекла хореографа. Предварительная работа заключалась в том, чтобы определить, какие идеи настоящего танцора можно попытаться реализовать с помощью робота. Инженеры использовали моделирование, чтобы быстро перебрать концепции движения, которые по силам выполнить роботу. Идеи сначала реализовывали в симуляции, вносили коррективы, а затем пробовали на роботе. Инженеры описывают процесс, как конвейер. Когда множество разнообразных движений описывалось множеством входных данных и реализовывалось роботом. В итоге, на создание танца потребовалось несколько месяцев напряженной работы.
В Boston Dynamics признают, что надежность робота Atlas пока нельзя сравнить с тем же показателем робота Спот. Его обслуживание занимает много времени, но инженеры не собираются останавливаться. Так, скоро Atlas научится работать руками. Не просто переставлять коробки или балансировать с помощью рук, а полноценно выполнять сложные задачи, чтобы руки робота стали такими же ловкими, как и ноги. А вы как думаете, чему еще следует научится самому продвинутому роботу в мире?
Если вы хотите сами посмотреть презентацию Марка Райберта и Скотта Куиндерсма, то вот ссылочка: https://slideslive.com/38946802/boston-dynamics


