![[Из песочницы] Термоакустический двигатель – двигатель Стирлинга без поршней](https://habrastorage.org/files/3b8/ea8/281/3b8ea828192f41f9bcd02dd77453b982.jpg "[Из песочницы] Термоакустический двигатель – двигатель Стирлинга без поршней")
Приятная особенность цикла Стирлинга – это то, что его КПД равен КПД цикла Карно [1]. Естественно у реальных двигателей Стирлинга эффективность ниже и зачастую намного. Двигатель Стирлинга начал своё существование с устройства, имеющего множество подвижных деталей, таких как поршни, шатуны, коленчатый вал, подшипники [2]. К тому же еще и ротор генератора крутился (Рисунок 1).
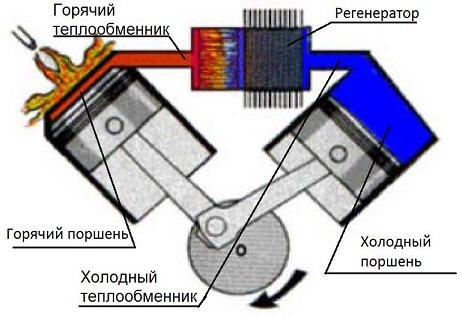
Рисунок 1 – Двигатель Стирлинга альфа типа
Посмотрите на двигатель Стирлинга Альфа типа. При вращении вала поршни начинают перегонять газ то из холодного в горячий цилиндр, то наоборот, из горячего в холодный. Но они не просто перегоняют, а ещё и сжимают и расширяют. Совершается термодинамический цикл. Можно мысленно представить на картинке, что когда вал повернётся так, что ось, на которую крепятся шатуны, окажется вверху, то это будет момент наибольшего сжатия газа, а когда внизу, то расширения. Правда это не совсем так из-за тепловых расширений и сжатий газа, но примерно всё же всё это так.
Сердцем двигателя является так называемое ядро, которое состоит из двух теплообменников – горячего и холодного и между ними находится регенератор. Теплообменники обычно делаются пластинчатыми, а регенератор – это чаще всего стопка, набранная из металлической сетки. Зачем нужны теплообменники понятно – нагревать и охлаждать газ, а зачем нужен регенератор? А регенератор – это настоящий тепловой аккумулятор. Когда горячий газ движется в холодную сторону, он нагревает регенератор и регенератор запасает тепловую энергию. Когда газ движется из холодной на горячую сторону, то холодный газ подогревается в регенераторе и таким образом это тепло, которое без регенератора бы безвозвратно ушло на нагрев окружающей среды, спасается. Так что, регенератор – крайне необходимая вещь. Хороший регенератор повышает КПД двигателя примерно в 3,6 раза.
Любителям, которые мечтают построить подобный двигатель самостоятельно, хочу рассказать подробнее про теплообменники. Большинство самодельных двигателей Стирлинга, из тех что я видел, вообще не имеют теплообменников (я про двигатели альфа типа). Теплообменниками являются сами поршни и цилиндры. Один цилиндр нагревается, другой охлаждается. При этом площадь теплообменной поверхности, контактирующей с газом совсем мала. Так что, есть возможность значительно увеличить мощность двигателя, поставив на входе в цилиндры теплообменники. И даже на рисунке 1 пламя направлено прямиком на цилиндр, что в заводских двигателях не совсем так.
Вернёмся к истории развития двигателей Стирлинга. Итак, пускай двигатель во многом хорош, но наличие маслосъёмных колец и подшипников снижало ресурс двигателя и инженеры напряжённо думали, как его улучшить, и придумали.
В 1969 году Вильям Бейл исследовал резонансные эффекты в работе двигателя и позже смог сделать двигатель, для которого не нужны ни шатуны ни коленчатый вал. Синхронизация поршней возникала из-за резонансных эффектов. Этот тип двигателей стал называться свободнопоршневым двигателем (Рисунок 2).
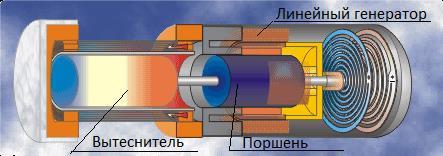
Рисунок 2 – Свободнопоршневой двигатель Стирлинга
На рисунке 2 показан свободнопоршневой двигатель бета типа. Здесь газ переходит из горячей области в холодную, и наоборот, благодаря вытеснителю (который движется свободно), а рабочий поршень совершает полезную работу. Вытеснитель и поршень совершают колебания на спиральных пружинах, которые можно видеть в правой части рисунка. Сложность в том, что их колебания должны быть с одинаковой частотой и с разностью фаз в 90 градусов и всё это благодаря резонансным эффектам. Сделать это довольно трудно.
Таким образом, количество деталей уменьшили, но при этом ужесточились требования к точности расчётов и изготовления. Но надёжность двигателя, несомненно, возросла, особенно в конструкциях, где в качестве вытеснителя и поршня применяются гибкие мембраны. В таком случае в двигателе вообще отсутствуют трущиеся детали. Электроэнергию, при желании, с такого двигателя можно снимать с помощью линейного генератора.
Но и этого инженерам оказалось не достаточно, и они начали искать способы избавиться не просто от трущихся деталей, а вообще от подвижных деталей. И они нашли такой способ.
В семидесятых годах 20-го века Петер Цеперли понял, что синусоидальные колебания давления и скорости газа в двигателе Стирлинга, а также тот факт, что эти колебания находятся в фазе, невероятно сильно напоминают колебания давления и скорости газа в бегущей звуковой волне (рис.3).
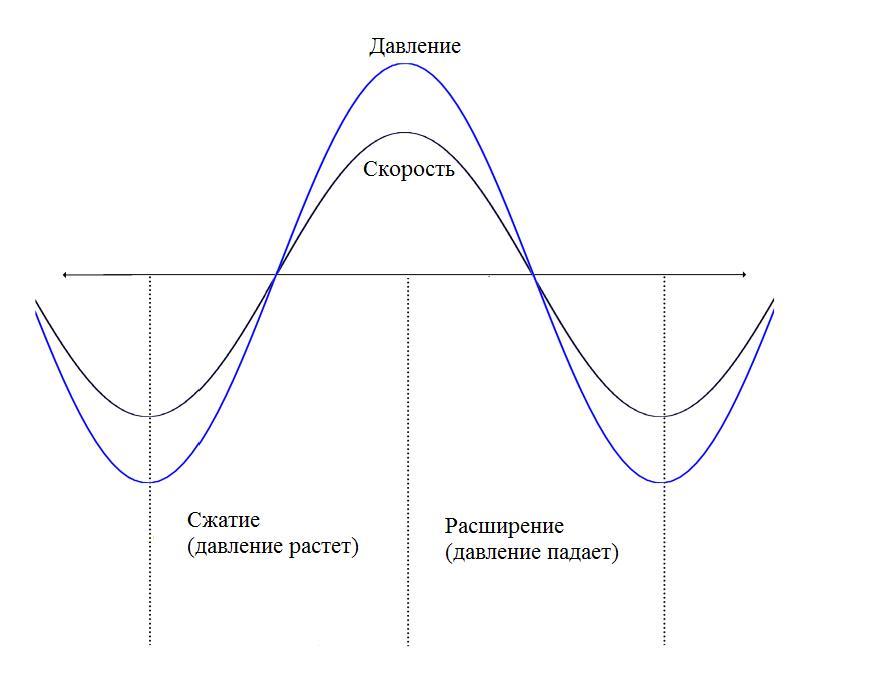
Рисунок 3 — График давления и скорости бегущей акустической волны, как функция времени. Показано, что колебания давления и скорости находятся в фазе.
Эта идея пришла Цеперли не случайно, так как до него было множество исследований в области термоакустики, например, ещё сам лорд Рэлей в 1984 качественно описал это явление.
Таким образом, он предложил вообще отказаться от поршней и вытеснителей, и использовать только лишь акустическую волну для контроля над давлением и движением газа. При этом получается двигатель без движущихся частей и теоретически способный достичь КПД цикла Стирлинга, а значит и Карно. В реальности лучшие показатели – 40-50 % от эффективности цикла Карно (Рисунок 4).
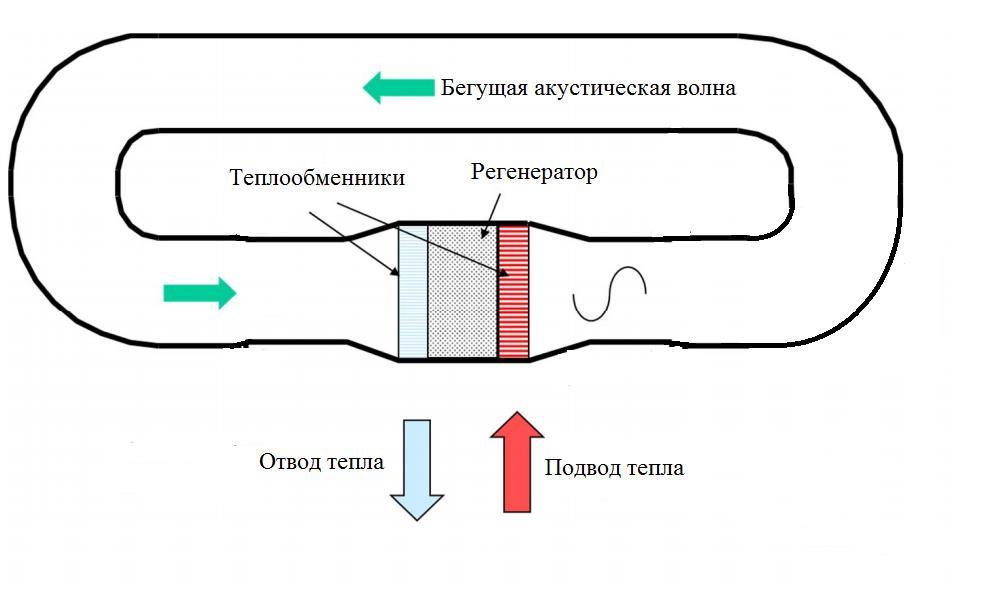
Рисунок 4 – Схема термоакустического двигателя с бегущей волной
Можно видеть, что термоакустический двигатель с бегущей волной – это точно такое же ядро, состоящее из теплообменников и регенератора, только вместо поршней и шатунов здесь просто закольцованная труба, которая называется резонатором. Да как же работает этот двигатель, если в нём нет никаких движущихся частей? Как это возможно?
Для начала ответим на вопрос, откуда там берётся звук? И ответ – он возникает сам собой при возникновении достаточной для этого разницы температур между двумя теплообменниками. Градиент температуры в регенераторе позволяет усилить звуковые колебания, но только определённой длины волны, равной длине резонатора. С самого начала процесс выглядит так: при нагреве горячего теплообменника возникают микро шорохи, возможно даже потрескивания от тепловых деформаций, это неизбежно. Эти шорохи – это шум, имеющий широкий спектр частот. Из всего этого богатого спектра звуковых частот, двигатель начинает усиливать то звуковое колебание, длина волны которого, равна длине трубы – резонатора. И неважно насколько мало начальное колебание, оно будет усилено до максимально возможной величины. Максимальная громкость звука внутри двигателя наступает тогда, когда мощность усиления звука с помощью теплообменников равна мощности потерь, то есть мощности затухания звуковых колебаний. И эта максимальная величина порой достигает огромных величин в 160 дБ. Так что внутри подобного двигателя действительно громко. К счастью, звук наружу выйти не может, так как резонатор герметичен и по этому, стоя рядом с работающим двигателем, его еле слышно.
Усиление определённой частоты звука происходит благодаря всё тому же термодинамическому циклу – циклу Стирлинга, который осуществляется в регенераторе.
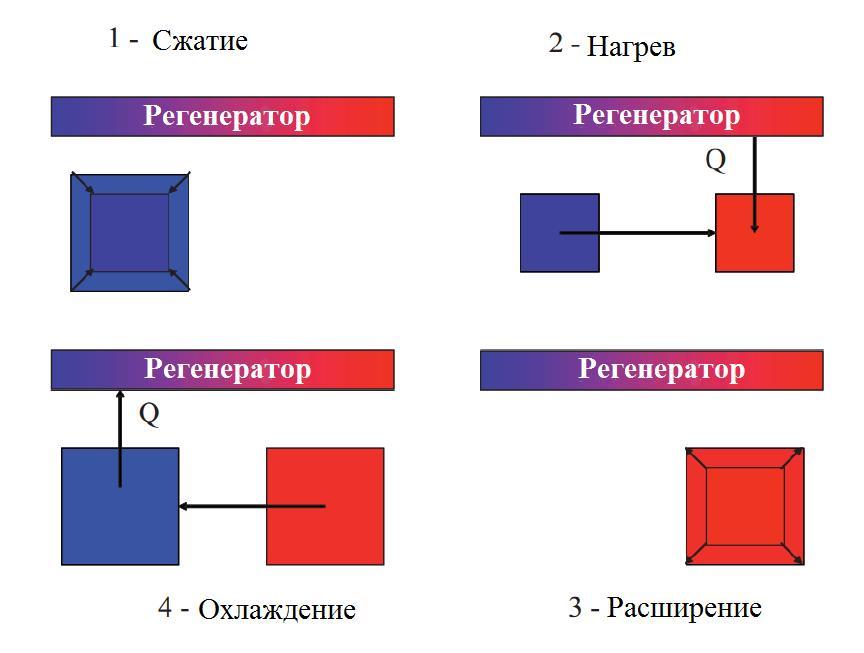
Рисунок 5 – Стадии цикла грубо и упрощённо.
Как я уже писал, в термоакустическом двигателе вообще нет движущихся частей, он генерирует только акустическую волну внутри себя, но, к сожалению, без движущихся частей снять с двигателя электроэнергию невозможно.
Обычно добывают энергию из термоакустических двигателей с помощью линейных генераторов. Упругая мембрана колеблется под напором звуковой волны высокой интенсивности. Внутри медной катушки с сердечником, вибрируют закрепленные на мембране магниты. Вырабатывается электроэнергия.
В 2014 году Kees de Blok, Pawel Owczarek и Maurice Francois из предприятия Aster Thermoacoustics показали, что для преобразования энергии звуковой волны в электроэнергию, годится двунаправленная импульсная турбина, подключенная к генератору [3].
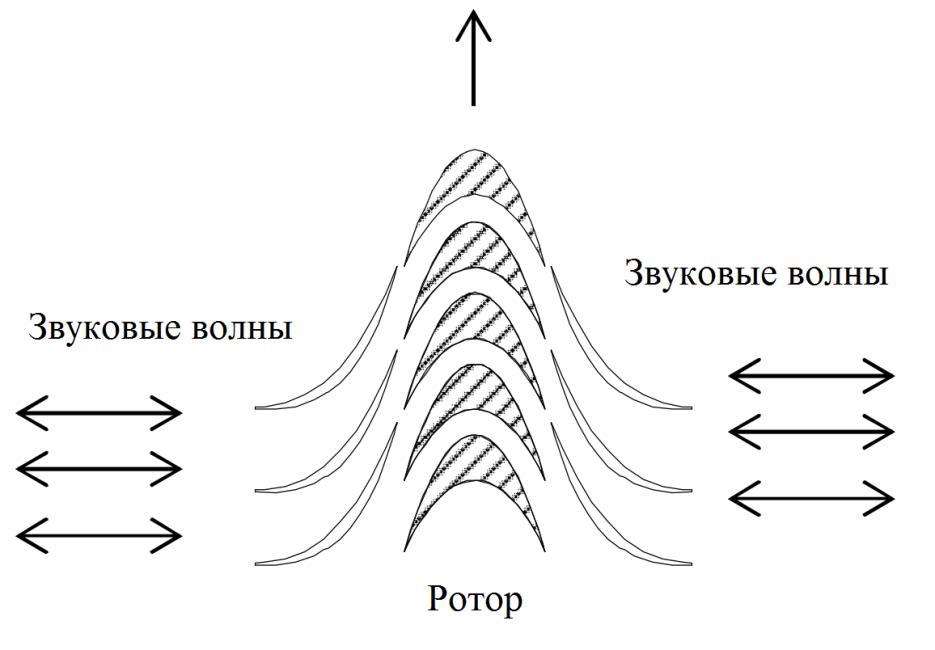
Рисунок 6 – Схема импульсной турбины
Импульсная турбина крутится в одну и ту же сторону вне зависимости от направления потока. На рисунке 6 схематично изображены лопатки статора по бокам и лопатки ротора посередине.
А так турбина выглядит у них в реальности:

Рисунок 7 – Внешний вид двунаправленной импульсной турбины
Ожидается, что применение турбины вместо линейного генератора сильно удешевит конструкцию и позволит увеличить мощность устройства вплоть до мощностей типичных ТЭЦ, что невозможно с линейными генераторами.
Что ж, будем продолжать пристально следить за развитием термоакустических двигателей.
Список использованных источников
[1] М.Г. Круглов. Двигатели Стирлинга. Москва «Машиностроение», 1977.
[2] Г. Ридер, Ч. Хупер. Двигатели Стирлинга. Москва «Мир», 1986.
[3] Kees de Blok, Pawel Owczarek. Acoustic to electric power conversion, 2014.
Источник


