![[Из песочницы] Роботы сделают мир чистым](http://i2.imageban.ru/out/2017/03/12/d6360b8619cf85daf1de7509b6f929a1.jpg "[Из песочницы] Роботы сделают мир чистым")
Автоматическое производство [1]
В самом деле, ведь ничто не появляется из ничего. Если в несколько раз вырастет потребление, то во столько же раз больше потребуется и ресурсов. А окружающая среда и без того испытывает со стороны человечества критическую нагрузку. По данным статистики, уже сейчас один человек в течение суток производит около 3–5 литров мусора, что в месяц составляет до 120 литров, а за год 15000 литров [9]. Увеличить производство даже вдвое означает спровоцировать экологическую катастрофу. Получается, что роботы в чем-то подобны ядерному оружию — при огромном потенциале (в случае с оружием разрушительном, для роботов созидательном) их полномасштабное применение невозможно из-за всеобщих трагических последствий.

Кадр из фильма «Свалка», 2014 г [2]
К счастью, роботы не термоядерные бомбы и выход из противоречия между возможностями и последствиями есть. Этим выходом являются сами роботы, приспособленные для утилизации отходов производства и потребления. Согласно старинному принципу, подобное лечится подобным. Если мы увеличим производство в два раза и при этом создадим такие робототехнические системы, которые будут утилизировать и превращать во вторичное сырье или энергию 50 % отходов, то нагрузка на окружающую среду не изменится. Если уровень утилизации достигнет 67 %, то производство можно увеличить в три раза. И так далее.
Естественно, это крайне грубая схема. На практике необходимо учитывать конкретные способы и объемы утилизации, затраты на производство дополнительного оборудования и много других факторов. Но очевидно, что увеличение потребления теснейшим образом связано со степенью переработки отходов. А поскольку общество с высоким уровнем потребления не слишком-то готово заниматься грязным ручным трудом, то роботам придется потрудиться. И они уже приступили к работе.
Задача утилизации отходов может быть разбита на три подзадачи:
- сбора отходов;
- их сортировки;
- переработки отходов.
Начнем с первой. Сейчас никого не удивишь роботом-пылесосом или роботом для мытья окон. А ведь это и есть простейшие роботы для сбора отходов. Но, конечно, их возможности крайне ограничены, да и соответствующие отходы — в основном бытовая и уличная пыль — не вызывают интереса с точки зрения дальнейшей утилизации.

Робот-пылесос iClebo Pop[3]

Робот для мытья окон Windoro WCR-I001 [4]
А вот «бродячая» корзина для мусора уже гораздо эффективнее обычной. В лаборатории по разработке взаимодействий и коммуникаций японского технологического университета Тойохаши создан небольшой мусорный контейнер на колесной базе. Он получил название Social Trash Box (STB). Робот оснащен микропроцессором, видеокамерой и динамиком, а также датчиками инфракрасного излучения и датчиком расстояния.

Social Trash Box [5]
Робот начинает свою кипучую деятельность с определения места, где в данный момент присутствуют люди. Это происходит с помощью инфракрасного датчика, реагирующего на тепло их тел. За безопасность перемещения робота среди людей отвечает датчик расстояния. Для поиска собственно мусора STB использует встроенную камеру в сочетании с алгоритмом распознавания объектов.
Когда робот находит мусор, он начинает выполнять активные «телодвижения» и издавать звуковые сигналы. Тем самым он «просит» людей поднять мусор и бросить в контейнер.
Инфракрасные датчики, расположенные в верхней части ведра, дадут знать, действительно ли мусор попал туда, куда надо. Робот даже может немного наклонить ведро в любую сторону, чтобы облегчить человеку выполнение его задачи. В общем, перед нами активное человеко-машинное сотрудничество в деле сохранения окружающей среды. Причем робот не только выступает в качестве сборщика мусора, но и служит будильником совести любителей намусорить где попало.
Но как море не вычерпаешь ложкой, так и весь мусор не соберешь в маленькие корзины. Для этого нужны более мощные агрегаты. Например такие, какие разработаны и испытаны в рамках проекта DustBot (www.dustbot.org) для отработки технологий робототехнической уборки и вывоза мусора в масштабах небольшого города. В нем задействованы многие специалисты из Италии, Испании, Британии, Швейцарии и Швеции, однако ведущая роль принадлежит исследователям из Высшей школы святой Анны (Scuola Superiore Sant’Anna), расположенной в Пизе. Финансовую поддержку проекту оказывает Европейская комиссия (European Commission).
Первый робот, названный DustClean, представляет собой автономную уборочную машину, оборудованную вращающимися щётками и пылесосом. DustClean чистит улицы, объезжая город по заданному маршруту, при этом останавливаясь перед пешеходами и минуя препятствия.

Робот DustClean [6]
Второй робот, получивший имя DustCart, можно назвать мусорщиком. Он собирает мусорные мешки городских жителей и отвозит их на переработку. Высота робота 150 см, вес 70 кг, скорость 1 м/с. Одного заряда батарей хватает на 16 км пути.

Робот DustCart [6]
Для того чтобы робот-мусоровоз прибыл к месту назначения, его нужно будет вызвать по телефону. После прибытия робота клиент вводит свой персональный код через экран на корпусе DustCart. Это необходимо, так как в дальнейшем подобные системы предполагается сделать платными. При этом человек может выбирать разные маршруты дальнейшей транспортировки мусора, а также тип мусора (органические отходы, стекло, пластик или бумага). После проделанных манипуляций клиент помещает мешок мусора в открывающийся люк робота, и он отправляется к пункту сбора отходов, где и выгружает мешок.
Роботы из проекта DustBot не могут полностью решить проблему сбора мусора. Их назначение скромнее — работы в таких местах, где обычной уборочной технике не поместиться. А таких мест в европейских городах очень много. Дополнительно роботы оснащены сенсорами, определяющими содержание в воздухе бензола, оксидов азота, углерода и серы, и датчиками температуры.
Полевые испытания DastBust-ов проходили в итальянском городке Печчоли. Коммуна Печчоли — первый в мире населенный пункт, в котором на дорогах была выделена отдельная полоса для движения роботов.

DustCart спешит по выделенке за очередной порцией мусора [7]
Следующим по масштабной шкале после DustBot будет робот ROARY, продемонстрированный компанией Volvo. Разработка велась совместно со специалистами Chalmers University of Technology, Malardalen University и University of Pennsylvania. Проект демонстрирует возможности совместной работы двух роботов, которые в перспективе помогут облегчить ежедневный труд городских рабочих.

ROARY работает, разведывательный дрон шныряет где-то поблизости [8]
ROARY транспортируется на специальной площадке, закрепленной на задней части мусоровоза. Сам мусоровоз на фотографии едва виден справа, поэтому может создаться ложное впечатление, что ROARY полностью автономен. В действительности его автономность существенно ниже, чем у DustBot-ов.
По прибытии оператор активирует беспилотный летательный аппарат, установленный на крыше автомобиля, после чего дрон сканирует окрестности для обнаружения мусорных контейнеров. Система передает данные о расположении баков роботу, который грузит мусорный контейнер на специальную платформу, возвращается к мусоровозу и поднимает бак, очищая его от мусора. В общем, ROARY приспособлен для самой тяжелой и грязной части работы мусорщика.
Для ориентации на местности ROARY использует GPS и лидар, которые позволяют ему избегать столкновения с препятствиями. С помощью встроенной камеры ROARY может обнаружить объект, находящийся в опасной близости от мусоровоза во время опорожнения контейнера, а автоматизированная функция аварийной остановки предупредит возможные неприятные последствия. Аварийным отключением может воспользоваться и оператор мусоровоза.
В общем, судя по трем рассмотренным системам, роботы вполне способны справиться со сбором мусора. Особенно если им в этом немного помогут люди. Это только справедливо — каждый должен убирать за собой. Но вот убирать за другими, а тем более разгребать накопленные ими за годы отходы, никто против своего желания не обязан. Поэтому придется снова обратиться к роботам. А если более конкретно, то к разработанной финской компанией ZenRobotics системе ZenRobotics Recycler (ZRR).
В настоящее время классическая методология предварительной сортировки мусора осуществляется в несколько этапов:
- Сортировка металл/не металл с помощью мощных электромагнитов.
- Сортировка тяжелое/не тяжелое с помощью продувки воздухом.
- Ручной этап.
На третьем этапе у конвейера находятся люди, которые при помощи определенного инструктажа и полученных навыков сортируют мусор. После чего разложенные по разным контейнерам отходы направляются на специальные заводы для переработки во вторсырье или биотопливо. Компания ZenRobotics решила избавить людей от грязной и монотонной работы, создав специальную роботизированную технологию, которая способна объединить все три этапа в один.
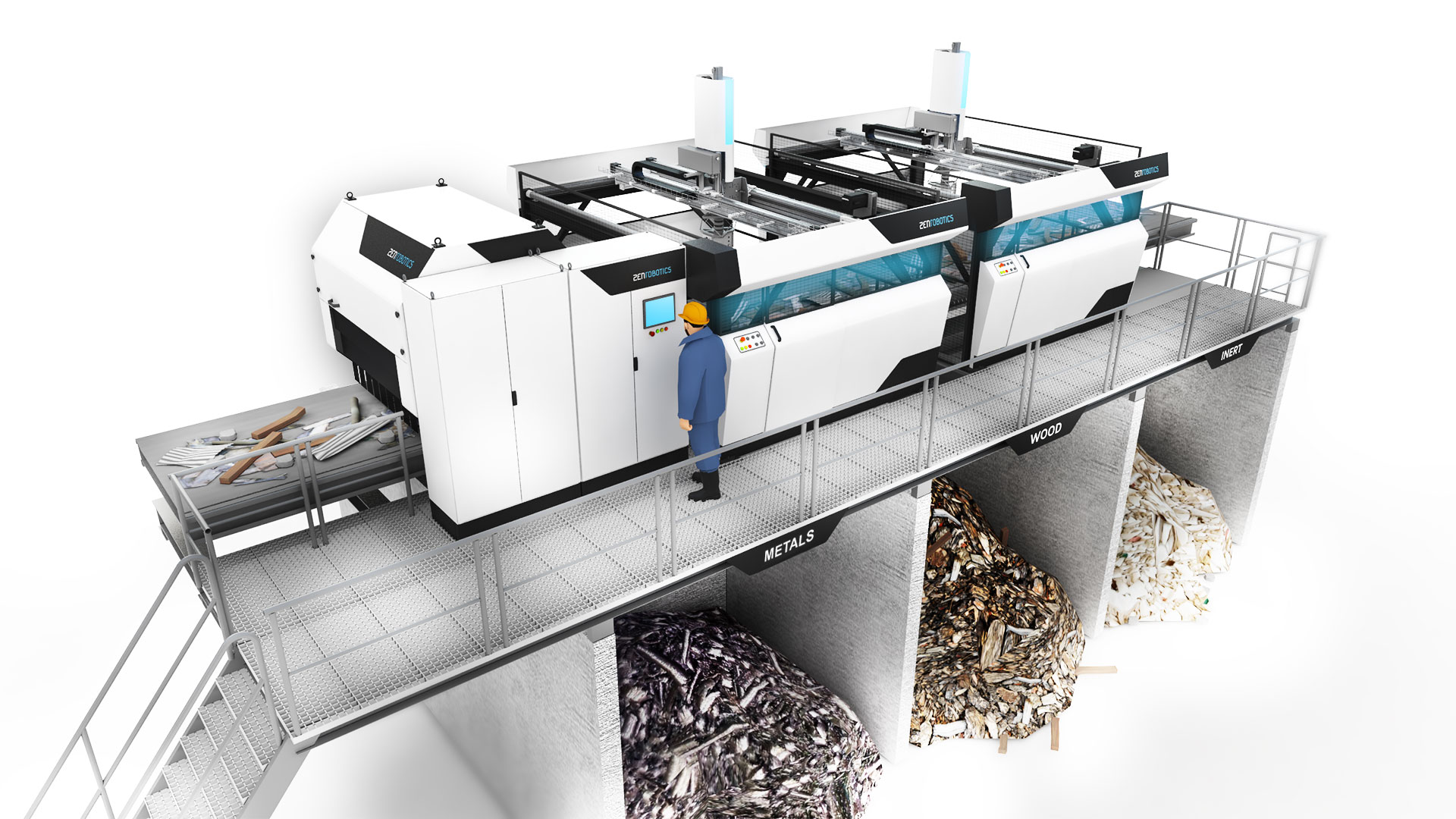
Правда, пока что речь идет, в основном, о строителных отходах, а точнее о горах мусора, остающихся после сноса старых зданий. ZRR состоит из 3 основных частей. Во-первых, это манипуляторы, которые представляют собой стандартные индустриальные роботы. Во-вторых, это датчики для распознавания фрагментов мусора — видеокамеры различных типов и металлоискатели. Датчики устанавливаются неподвижно. В-третьих, компьютеры в индустриальном исполнении. Основой «интеллекта» ZRR является программное обеспечение, регулярно обновляемое фирмой через Internet.
Устройство ZRR наглядно представлено на рисунке, изображающем действующий прототип полноценной промышленной системы. Строительный мусор с помощью конвейера подается под блок сенсоров. Сенсоры распознают каждый фрагмент мусора и передают в систему управления манипуляторами информацию о его расположении на конвейере, размере и материале — кирпич, дерево, арматура и т. п.

Действующий прототип ZRR [9]
Когда фрагмент достигает зоны действия манипулятора, тому остается только переместиться в уже рассчитанное положение, раскрыть схват с учетом размера фрагмента, снять фрагмент с конвейера и бросить в контейнер с соответствующей фракцией.
Не исключено, что некоторые фрагменты мусора не будут достоверно опознаны сенсорами. В этом случае манипуляторы не станут их сортировать наугад. Нераспознанные фрагменты будут доставлены конвейером в специальный сборник, откуда их снова подадут в начало конвейера, под сенсоры. Скорее всего, при другом расположении на ленте и относительно друг друга эти фрагменты удастся правильно распознать. Процесс будет продолжаться, пока вся партия мусора не окажется разложена по фракциям.
Коммерческая система ZRR уровня больше прототипа, включает минимум два манипулятора и объемистые контейнеры.

Манипуляторы ZRR за работой [10]
ZRR в минимальном коммерческом варианте [10]
На основе ZRR могут быть построены многоступенчатые системы сортировки. Отдельные установки в такой системе работают последовательно — если какой-нибудь фрагмент мусора будет пропущен первой установкой, то вторая с высокой долей вероятности с ним справится.
Программное обеспечение ZRR может принимать самостоятельные решения и самообучаться. Поэтому вмешательство человека в работу системы минимально и требуется только при отказах.
Справедливости ради следует отметить, что ZRR не является единственным возможным решением для сортировки мусора без участия (или с минимальным участием) человека. Так, немецкой компанией GUNTHER ENVIROTECH разработана специальная сортировочная установка SPLITTER для сортировки твердых бытовых отходов. Эта установка не использует сенсоры, манипуляторы и сложное программное обеспечение. Всех их заменяют шнеки и валы специальной формы, позволяющие разделить мусор по форме, размеру и весу на 3 фракции.
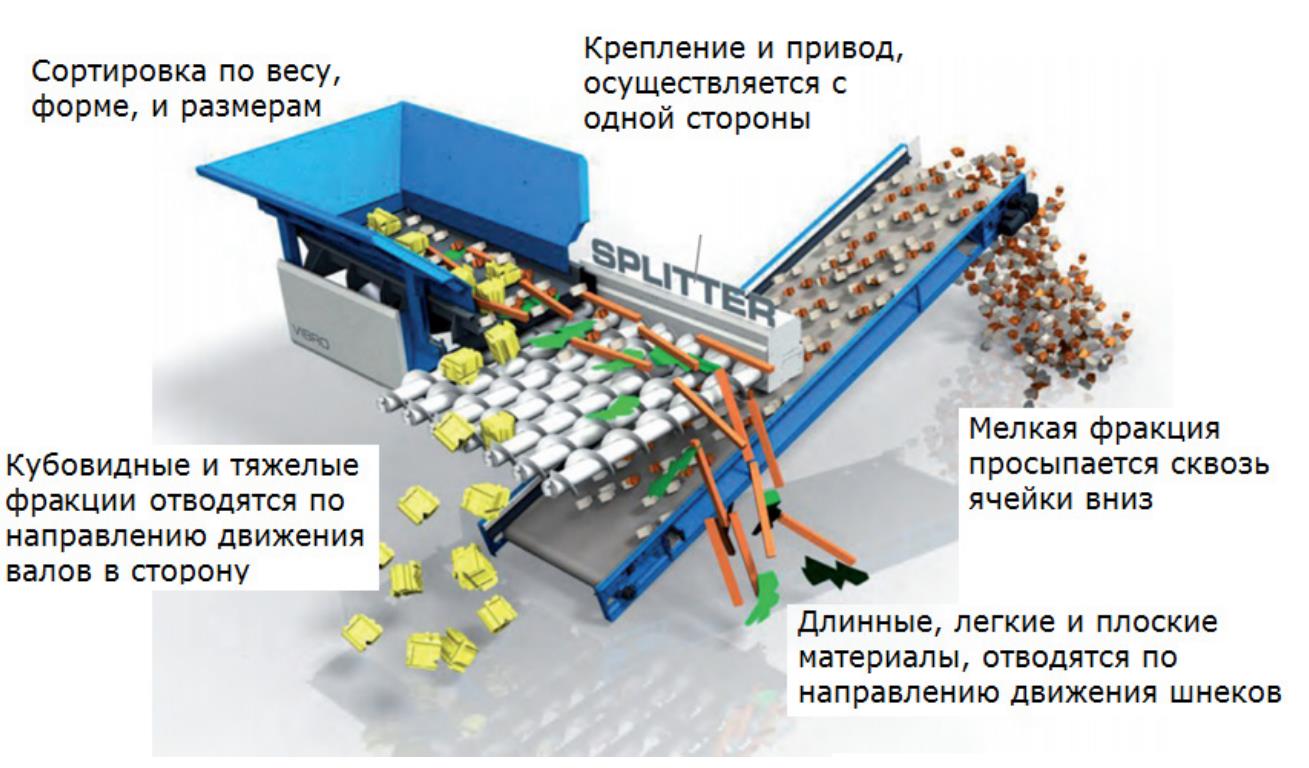
Установка SPLITTER [11]
Несмотря на простоту и оригинальность конструкции, очевидно, что SPLITTER способна осуществлять только грубое первичное разделение мусора на фракции. При необходимости дальнейшей сортировки необходима система типа ZRR. Таким образом, эти технологии не столько конкурируют, сколько дополняют друг друга при решении поставленной нами в начале статьи задачи — утилизации отходов не менее чем на 2/3 с использованием средств робототехники.
И тут выясняется, что, говоря об утилизации мусора на 2/3, мы существенно занижаем возможности располагаемых технологий. Потому что уже эксплуатируются системы, позволяющие поднять показатель утилизации до 97%!
В начале 90-х группа нидерландских ученых начала исследования и разработку новой технологии, основными задачами которой стала переработка отходов без предварительной сортировки, получение качественного (в т.ч. очищенного от ядовитых и вредных веществ) первоначального сырья, а так же приемлемость по затратам, прибыльность и, одновременно, экологическая безопасность.
В 2000 году ученые добились своей цели, протестировали и запатентовали так называемую «3R» технологию, объединяющую в себе все вышеперечисленные принципы [12]. Эксплуатацией технологии занимается компания «EPC Group».
Мусороперерабатывающий завод, построенный на основе принципов «3R», способен перерабатывать:
- бытовые отходы;
- крупногабаритный неизмельченный мусор (мебель, строительные материалы т. д.);
- органические отходы;
- содержимое свалок;
- неразобранные машины и части грузовиков, аккумуляторы, покрышки;
- электронное и электрическое оборудование (телевизоры, холодильники и т. д.);
- медицинские отходы;
- индустриальные отходы;
- батарейки, градусники, лампы
и многое другое.
В зависимости от задач, завод комплектуется из необходимых самостоятельных блоков.
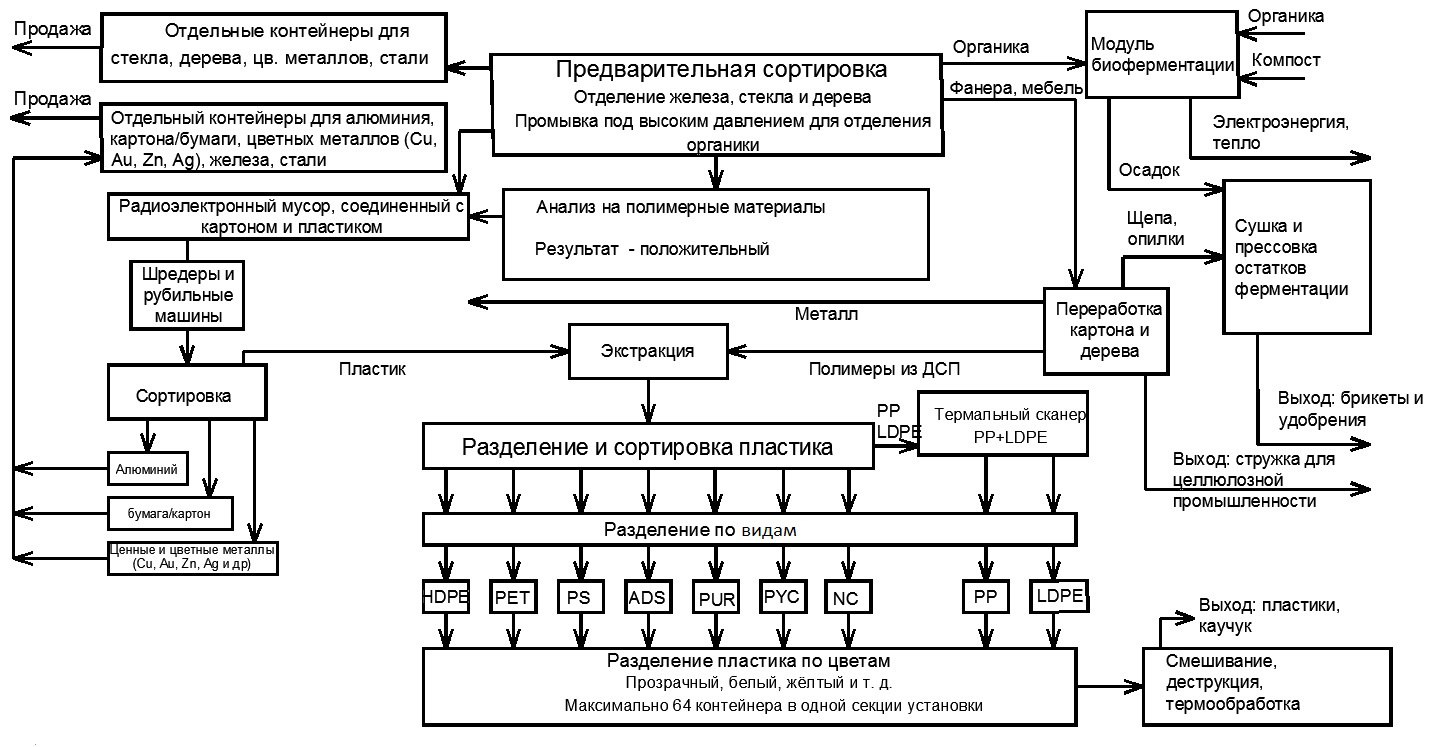
Обобщенная схема переработки мусора с использованием «3R» технологии [12]
На этапе проектирования, проводиться анализ отходов, предполагаемых к рециклингу в системе. Так, определяется качественный состав для расчета эффективности и окупаемости, которую сможет гарантировать производитель, а так же наличие опасных или радиоактивных веществ в их составе.
Ниже описан обобщенный процесс переработки мусора на «3R»-заводе.
- Несортированные отходы автоматически сортируются непосредственно на заводе. Дополнительный разбор мусора перед доставкой на завод не требуется.
- Процесс переработки начинается с отделения непластиковых, электрических и электронных составляющих. Далее отделяются магнитные материалы, а так же дерево, стекло. Все они упаковываются в тару для дальнейшей продажи или переработки. На этом этапе возможна интеграция в «3R»-технологию систем типа ZRR для повышения качества и полной автоматизации сортировки.
- Оставшиеся отходы, содержащие пластик, анализу на качество и степень эрозии. После этого они поступают в измельчители.
- Вторая сортировка уже размельченных материалов: металлы, бумага, картон разделяются и готовы к продаже.
- Пластики очищаются от остаточных продуктов в экстракторе. Красители выделяются из материалов и могут быть использованы повторно.
- Пластик сортируется по видам — PET, PVC, HP, HDPE, PURE, ABS и т.д. Модуль переработки пластика включает до 64 контейнеров для сепарации различных видов пластика. Сепарация пластика происходит с помощью термального сканера по индексу плавления, так как каждый вид имеет свою температуру плавления.
- Разделенный по видам пластик далее сортируется по цветам.
- Смешивание и прессование: пластики готовятся на продажу с возможным учетом требований покупателя.
- Газовая ферментация — органические материалы собираются для производства биотоплива.
- Различные виды дерева перерабатываются и очищаются для дальнейшего использования в целлюлозно-бумажной промышленности.
- Сырые остатки от газовой ферментации и щепа от картона и дерева поставляются в брикетный блок, где масса высушивается, перемалывается и прессуется в топливные брикеты. Брикеты также могут использоваться в сельском хозяйстве и фермерской индустрии как удобрение.
Обратим внимание, что для получения энергии используется биогаз из блока ферментации. Таким образом, количество получаемой энергии не зависит напрямую от процентного содержания органики в поступившем на завод мусоре, а только от времени и интенсивности ферментации. Поэтому завод можно сделать не потребителем, а поставщиком энергии (в том числе и для самого себя) практически в любом случае.
Основываясь на подсчетах «EPC Group», при обработке 100 кг отходов, получается 97 кг готового сырья высокого качества (выход и качественный состав сырьевого материала зависит от типа отходов, поставляемых в систему), а окупаемость проекта достигнет 30–50 % в год.
По технологии «3R» уже построены несколько мусороперерабатывающих заводов, в том числе в Дюссельдорфе, Амстердаме и Харлингене. Строится завод в Джакарте. Ниже приведен сравнительный анализ проектируемого завода в Джакарте и уже существующих заводов [12].
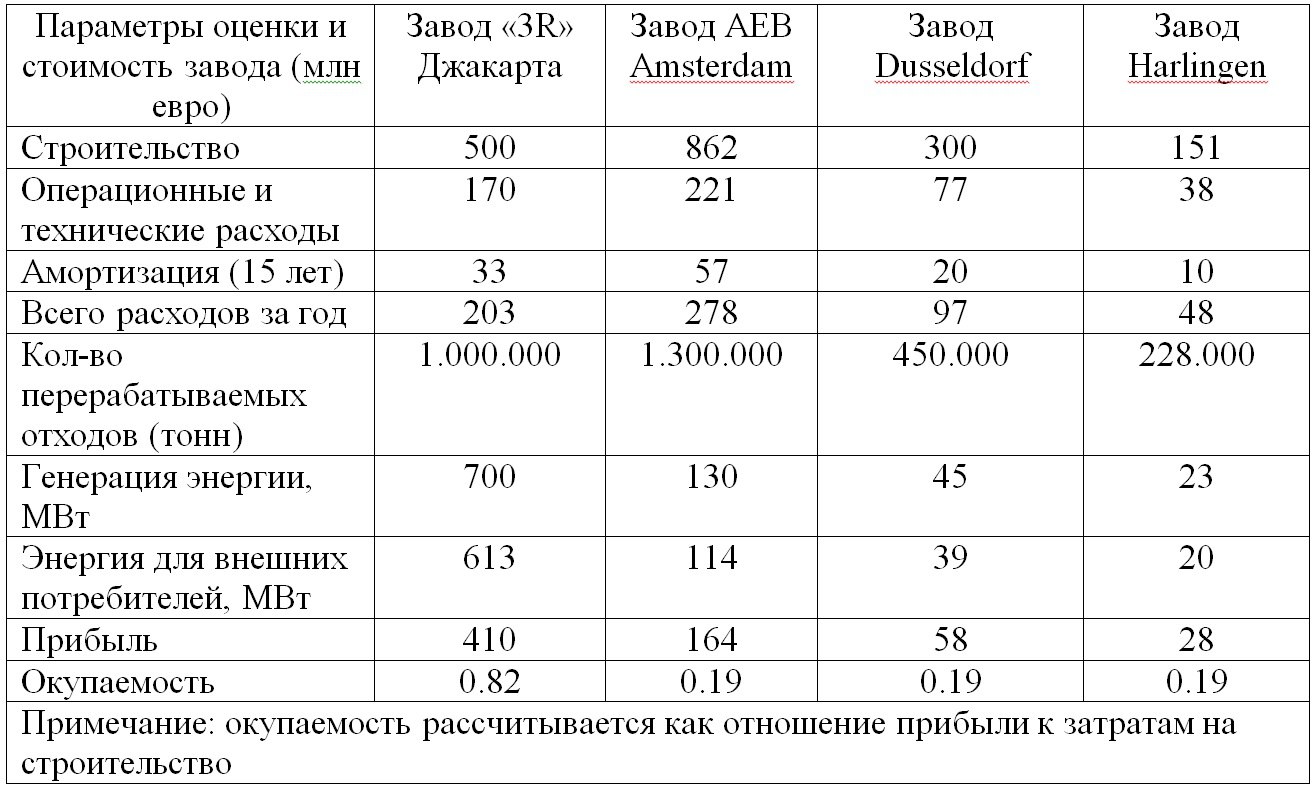
Как видно из таблицы, все заводы «3R» технологии не только перерабатывают мусор, но и являются источниками энергии для внешних потребителей.
Если суммировать сказанное выше, то очевидно, что процессы сбора, сортировки и переработки мусора могут быть практически полностью автоматизированы, причем на основе уже имеющихся технологий. Более того, автоматическая утилизации отходов способна принести немалую прибыль. От человека, по сути, потребуется только помогать роботам в их новом благородном занятии и, все-таки, не бросать обертки от мороженого мимо спешащего за ними робота-контейнера. А то нехорошо как-то получится.
2. http://www.world-art.ru/cinema/cinema_photos.php?id=59760&screenshot_number=17
3. Как выбрать самый лучший робот-пылесос?
4. Робот для мытья окон: советы по выбору и отзывы о производителях
5. Роботизированный мусорный бак просит людей помочь ему подобрать мусор
6. Проект DustBot — роботы-мусорщики на улицах Европы
7. Интересные изобретения. Робот-мусорщик
8. Представлен первый автономный робот-мусорщик ROARY
9. Умный робот для сортировки и сбора мусора
10. zenrobotics.com
11. http://www.zaotl.ru/filestore/pdf/_file_1396866305.pdf
12. 3R технология — новое в переработке отходов
Источник


