
Экзоскелеты, то есть устройства в виде внешнего механизированного каркаса, повторяющего движения человека, уже давно не считаются экзотикой. Жаль, пока только на киноэкранах и страницах книг, да в редких новостях из экспериментальных лабораторий. Что достаточно странно, ведь эти устройства развиваются уже более века.
Первые концепции подобных механизмов появились еще в «эпоху пара». В 1830 году английский художник Роберт Сеймур изобразил питаемые от парового котла сапоги-«локомотив». Несмотря на то, что картинка носит сатирический характер, технически устройство выглядит достаточно продуманным (детально изображена схема привода, пульт управления), из чего можно сделать вывод, что идея вполне себе витала в воздухе.

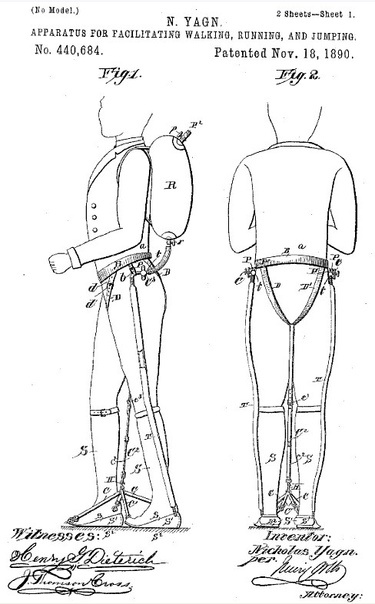
А вот «Аппарат для облегчения ходьбы, бега и прыжков» (патент от 18 ноября 1890 года) российского изобретателя Николая Ягна проектировался уже без всяких шуток. В аппарате применялся ранцевый накопитель жидкости. Сначала при помощи поршней, закрепленных на бедрах, жидкость накачивалась в ранец, после чего передавала ускорение самому поршню. Для стабилизации ширины шага применялась система эластичных жгутов, соединяющих ступни. В натуре, насколько мне известно, аппарат построен не был.
Подобных проектов было еще довольно много и абсолютное большинство из них оставались не более, чем эскизами и чертежами на бумаге. Из общего списка стоит выделить разве что ранее упоминавшийся (статья про ракету с руками) проект «Золотая рука» — механизированная рука-ортез для парализованных и больных людей. Ну и разумеется главную тему сегодняшней статьи — проект Hardiman 1 разработки компании General Electric.
Во второй половине 50х мир находился в состоянии футуристического бума. Человечество жило в ожидании, когда физический труд полностью заместят роботы, домохозяек освободят от бытовой рутины «умные дома», и вообще в каждый дом придёт мирный атом (в хорошем смысле). Не отставали от общей тенденции и в компании «Генерала Электрика», где по заказу военных взялись за проект Handyman — телеуправляемого манипулятора с обратной связью для обслуживания самолётов и ракет с ядерной силовой установкой. Вообще это сейчас компания General Electric у обывателя больше ассоциируется с бытовой техникой и прочими мирными штуками. Однако в истории компании были разработки и танков и военных самолётов и стрелкового оружия. В частности, шестиствольных пулеметов M61 Vulcan и М134 Minigun, любимых всеми фанатами видеоигр и Арнольда Шварценеггера.

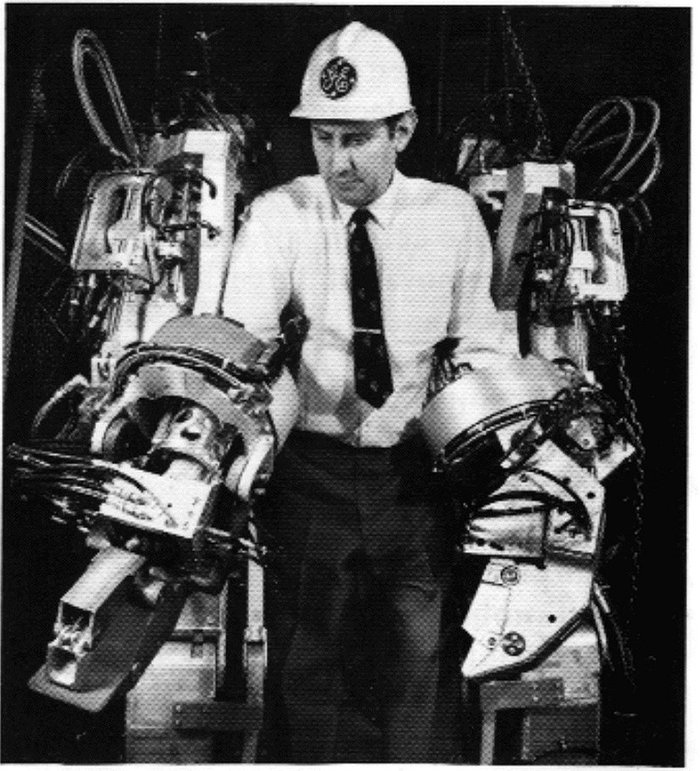
В 1958 году к проекту Handyman был привлечён выдающийся инженер Ральф Мошер. Ранее, в 1956 году, он сконструировал статичный манипулятор «Yes Man», который под управлением считывающего устройства на руке оператора мог проделывать достаточно тонкие манипуляции, например, подать даме пальто (не разорвав его в клочья), поднять телефонную трубку (не разломав ее на куски) или повернуть дверную ручку и открыть дверь (не выломав ее вместе с косяком). Устройство было снабжено системой обратной связи, то есть на управляющий «рукав» передавалось сопротивление, адекватное тому, которое испытывал основной манипулятор.
«Yes Man» разливает на троих:

В 1961 году по итогам переговоров с Пентагоном в General Electric было решено расширить проект Handyman до создания полноценного механизированного костюма, увеличивающего силовые характеристики обычного человека. Проект получил название Hardiman, что можно перевести примерно как «работяга», но расшифровывалось как «Human Augmentation Research and Development Investigation» + «Man» от «манипулятор». Основной задачей экзоскелета виделось обслуживание самолётов, в том числе установка бомб и прочего подвесного снаряжения без применения транспортёров и лебедок. Это позволило бы сильно ускорить подготовку самолёта к вылету, а значит и увеличило бы количество вылетов за период времени. Особенно актуальным это было для авианосцев, где помимо прочего остро стоял вопрос экономии свободного пространства. Идея, кстати, возникла не на пустом месте. Во время Арабо-Израильских войн наземные команды обслуживания ВВС израильтян действительно применяли подвеску бомб и ракет вручную. Это сильно ускоряло процесс и позволяло буквально непрерывно «долбить» с воздуха арабские войска, но ожидаемо приводило к быстрому «износу» уже самих наземных команд. Вполне вероятно, что в дальнейшем эти экзоскелеты применялись бы и как боевые платформы для мобильного тяжелого вооружения, которые мы так часто видим в фантастических фильмах («Грань будущего», «Аватар» и т. д.).
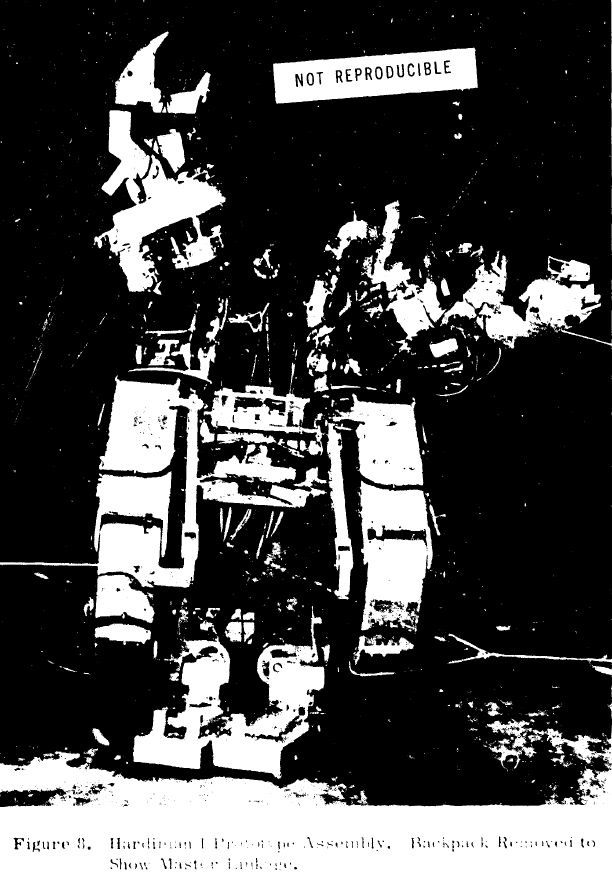
В основу экзоскелета была заложена система обратной связи, то есть оператор должен был отслеживать действия манипуляторов не только визуально, но и тактильно, что в разы повышало точность его действий. В 1965 году был собран первый действующий прототип.

Хоба!
Для кистей рук применялся гидромеханический привод, для ног и рук в целом — электрогидравлический. В целом гидравлика и по сегодняшний день считается оптимальным вариантом для создания экзоскелетов. Разве что когда-нибудь наука научится создавать синтетические мышцы повышенной мощности. Гидравлика, по сравнению с пневматикой, обладает большей скоростью отклика и позволяет развивать большую мощность при меньших размерах цилиндров.
Устройство получилось несколько превышающим габариты человека, но не критично. Высота 210 см., ширина 110 см. Предполагалось, что при весе около тонны он сможет свободно манипулировать грузом до 300 кг. На практике прототип получился существенно тяжелее — более 3 тонн. Всего в экзоскелете было 30 подвижных суставов, полноценно имитирующих движение человеческого тела. Стендовые испытания каждой конечности по отдельности дали неплохие результаты, руки даже показали грузоподъемность выше расчётной — до 340 кг.
Увы, после сборки конструкции воедино картина стала куда менее радужной. Эффективные по отдельности конечности категорически отказывались действовать согласовано. Их движения были недостаточно плавными, постоянно нарушали баланс всей конструкции, из-за чего операторам приходилось делать резкие движения, на которые механические конечности отзывались не менее резкими рывками. Настолько резкими, что во избежание травм пришлось отказаться от испытаний с живым оператором внутри. Дошло до того, что во время тестов одну ногу экзоскелета стали намертво закреплять на стенде на уровне пояса. Тем более, что из-за рассогласованности движений передвигаться Hardiman всё равно был неспособен. Не всё гладко было и с механической частью — часть приводов в руках блокировали друг друга. В итоге разработка продолжалась до 1971 года, после чего финансирование проекта прекратилось и он был закрыт. Хотя инженерам удалось устранить механические проблемы с руками и даже научить конструкцию худо-бедно ходить (со скоростью аж 2 км в час), огромный вес и несогласованность движений всё еще оставались нерешенной проблемой. Кроме того, на тот момент не было создано достаточно компактного и мощного источника питания, который мог бы обеспечивать энергией всю эту конструкцию достаточно долгое время.
Страничка из отчета исследовательской лаборатории GE от 01 мая 1971
Тем не менее нельзя сказать, что труды Ральфа Мошера пропали впустую. Так, вполне функционирующий на данный момент экзоскелет XOS компании Sarcos недвусмысленно напоминает далекого предка. Да и сотрудники ведущего на сегодняшний день центра робототехники Boston Dynamics неоднократно заявляли, что активно используют наработки прошлого, в том числе и ранние проекты General Electric.

В России также ведутся разработки экзоскелета под названием «ЭкзоАтлет», первого российского медицинского экзоскелета для реабилитации и реинтеграции в общество людей с нарушением функций нижних конечностей. Как заявляют разработчики, этот экзоскелет сможет вернуть мобильность не только людям с травмами ног или спинного мозга, но и с последствиями инсульта. В настоящее время создано несколько действующих прототипов изделия. Последняя модификация «Альберт» дистанционно управляется с костылей и позволяет человеку самостоятельно ходить, садиться и вставать.


